-
-

Thumbnail + Logo + Welcome Screen
-
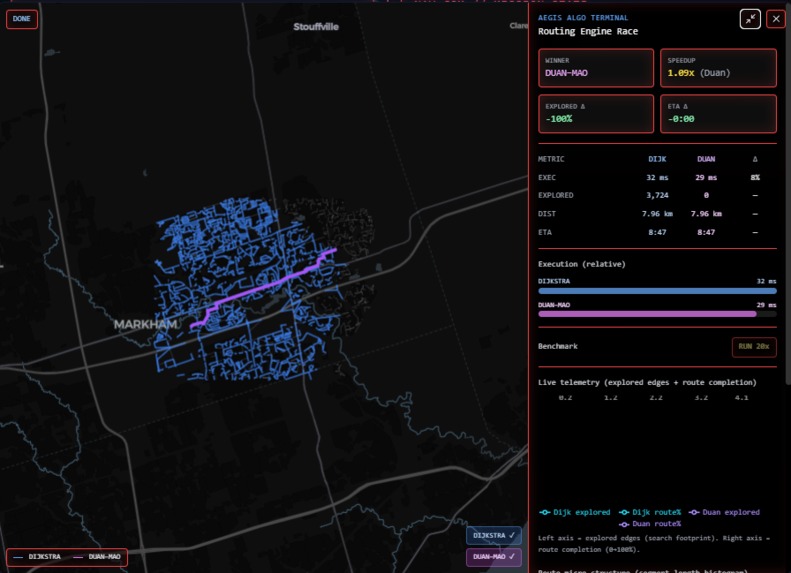
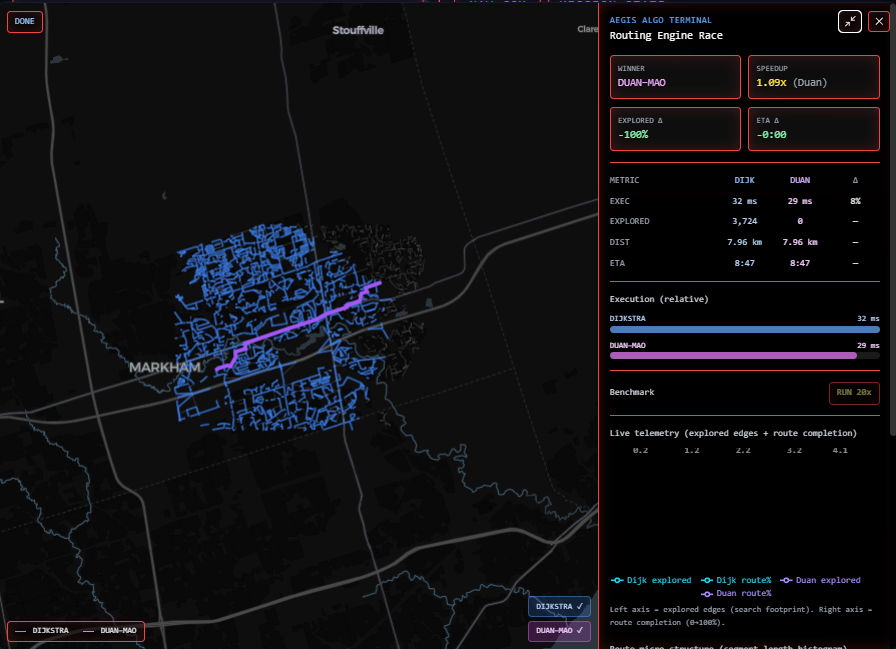
Algorithm Terminal
-
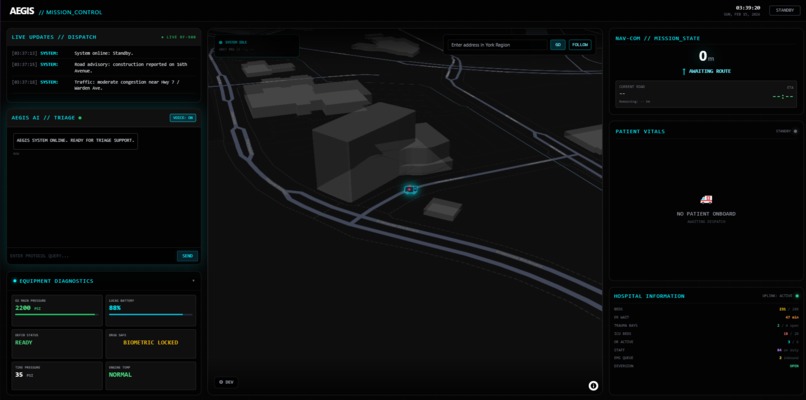
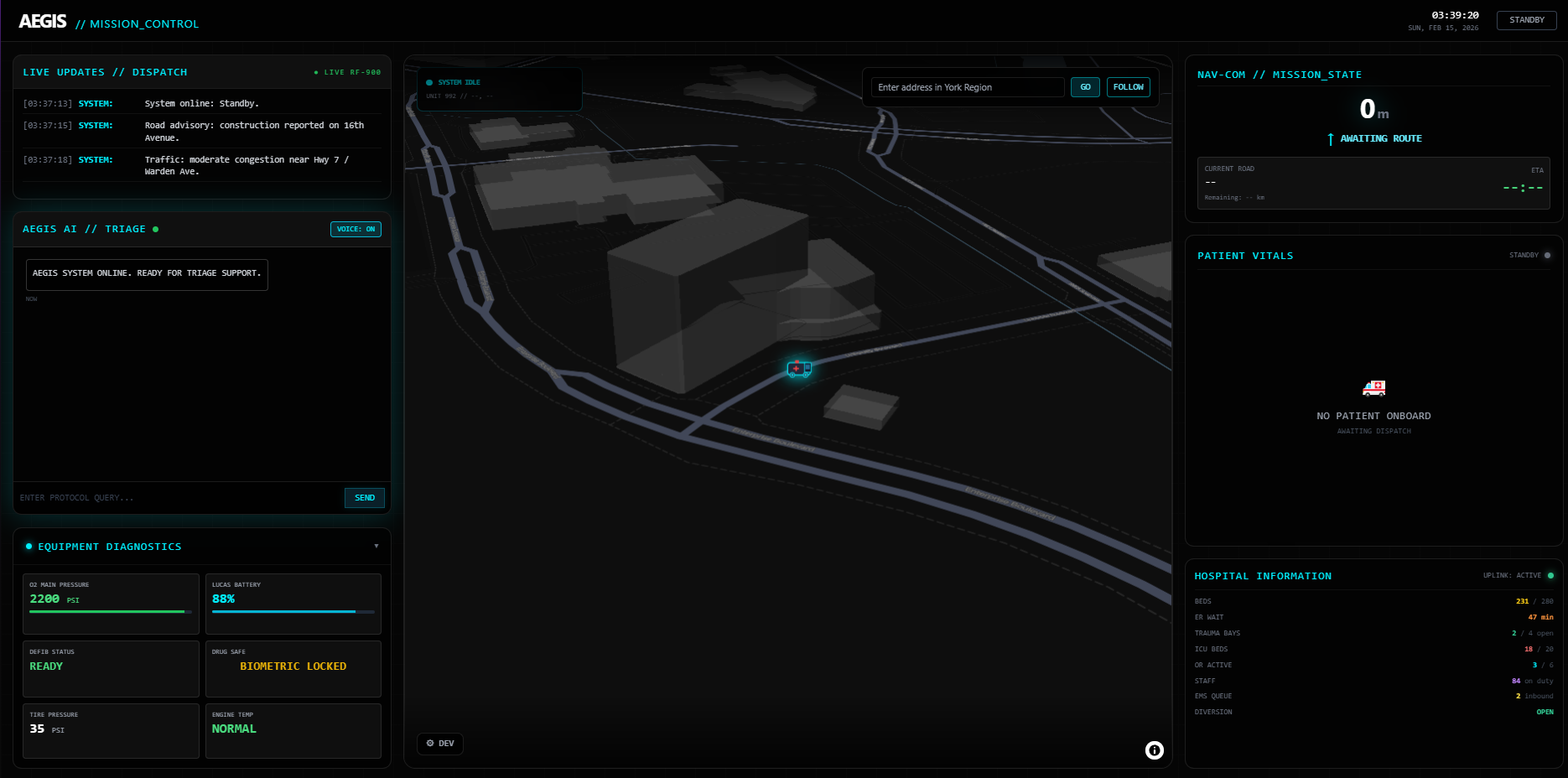
Standby Mode
-
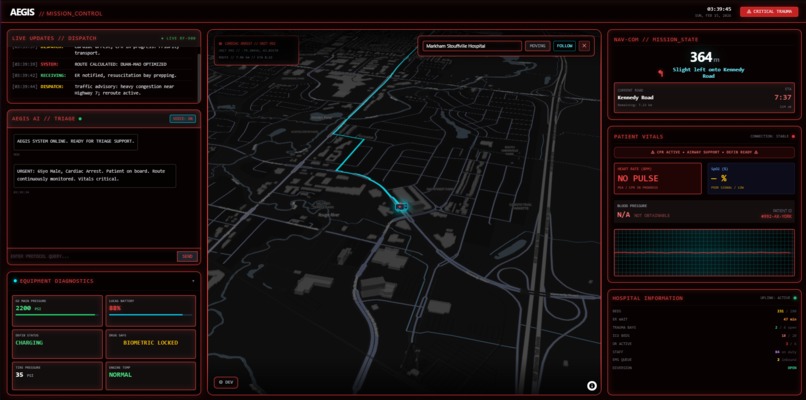
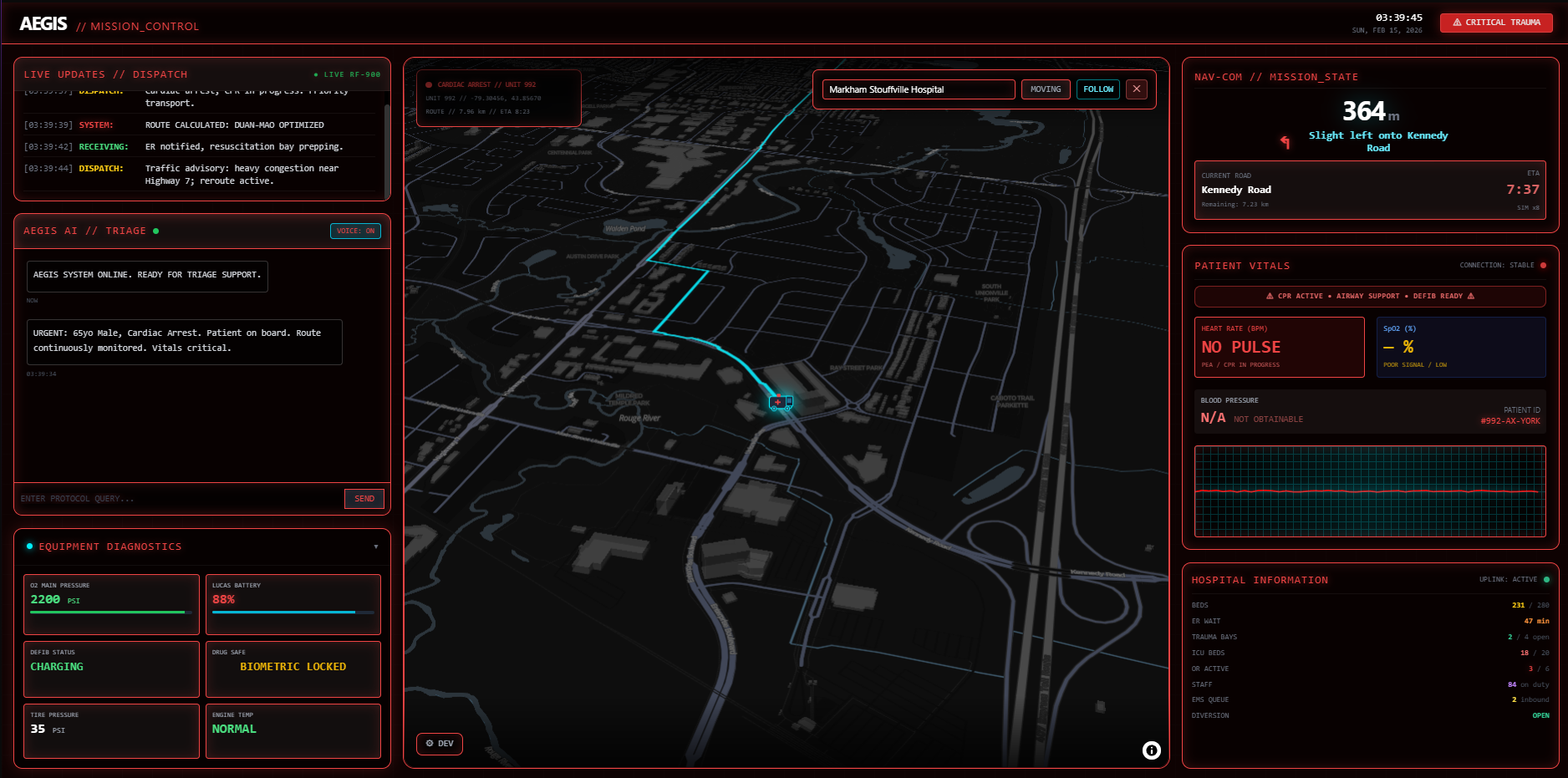
Critical Mode

Mission: Faster Response. Smarter Support. Safer Lives.
Category: Healthcare • Re-engineering
Sponsor Alignment (demo narrative): York Region (EMS / Fire / Community Safety)
Core Demo Claim: Real road-law routing + GPS-style simulation + live navigation telemetry + AI triage assistant + algorithmic routing telemetry (Dijkstra vs Duan–Mao BM-SSSP).
Safety / Compliance Disclaimer (read this first):
Aegis is a hackathon prototype for demonstration and research exploration. It is not a medical device, not certified clinical decision support, and must not be used to make real patient-care decisions or live dispatch decisions. AI outputs are advisory only and must be validated against official protocols.
1) Executive Summary
The problem
Emergency crews often operate with fragmented tooling:
- Consumer GPS: routing and ETA, but not dispatch-aware and not built for mission workflows
- Radio/dispatcher updates: not integrated into route logic or a single UI
- Separate systems for patient notes, protocols, and equipment checks
This fragmentation increases avoidable cognitive load and can contribute to delays, exactly when time and attention are most scarce.
The solution: Aegis
Aegis is a single-screen in-vehicle command dashboard concept that fuses:
- Real routing on a directed road network (one-ways respected)
- Turn-by-turn navigation with live ETA and “next maneuver in X meters”
- GPS-style simulation (vehicle icon follows the route, follow-camera)
- AI clinical copilot for concise protocol guidance and summaries (voice-capable)
Demo KPI (York Region alignment)
Our demo uses a 6-minute response-time target as a north-star KPI for high-priority calls. Aegis is built around two practical levers that can support that goal:
- reducing wrong turns / missed maneuvers under stress
- reducing re-route latency when disruptions occur
Note: This KPI is used for demo framing and sponsor alignment; operational targets vary by call type and policy.
2) What’s Real Today vs What’s Next
What’s real today
- Routing is real: OpenStreetMap drive network routing via OSMnx + NetworkX (directed graph)
- Vehicle simulation is real: marker follows the route polyline and stays on-road (snapped)
- Navigation telemetry is real: remaining distance, remaining ETA, next instruction, current street
- AI assistant endpoints exist:
- Gemini for responses
- optional ElevenLabs TTS
- demo audio fallbacks included
- Algorithmic Race is real:
- minimap replay loop of Dijkstra vs Duan–Mao BM-SSSP exploration + final path
- expanded Bloomberg-style telemetry (KPIs, trend lines, histograms, benchmark runner)
What’s next (roadmap)
- Dispatch feed integration (WebSocket + incident updates)
- Incident/closure integration (public data feeds) → automated reroute logic
- “Black box” mission logging (audit + replay) for compliance and training
3) Interface Layout (Single-Screen Grid)
Aegis uses a glanceable dashboard layout around a live map canvas.
Design principles
- Glanceable + motion-safe: large type, few focal points, progressive disclosure
- Two visual modes (concept):
- Cruise Mode: low clutter, “glassy” panels
- Red Alert Mode: high contrast, larger nav instructions, fewer distractions, more audio cues
| Zone | Panel | What it shows | Data source today | Planned expansion |
|---|---|---|---|---|
| Center | Live Map (Canvas) | 2D/3D map, route polyline, vehicle icon, follow camera | MapLibre GL | incident overlays, more map layers |
| Top Left | Live Updates | dispatch notes, scene changes, unit status | mock/static | WebSocket dispatch + alerts |
| Mid Left | AI Assistant | protocol guidance & concise summaries (optional voice) | Gemini + (optional ElevenLabs) | structured outputs + tool use |
| Bottom Left | Equipment Diagnostics | O2/defib/supplies/vehicle health (demo feed) | mock feed | IoT/BLE integrations |
| Top Right | Nav-Com | next maneuver, ETA, distance remaining, current street | real route metadata | auto reroute, “nearest ER” |
| Mid/Bottom Right | Patient / Mission | patient summary, vitals, timeline | mock/placeholder | mission event log + replay |
4) Navigation: What Makes It “Real”
Road-law routing
- Routes run on the OSM “drive” network (directed graph): one-ways are respected.
- Start/end are snapped to the nearest drivable node to avoid “inside buildings” artifacts.
Live navigation telemetry
The backend returns:
path_coordinates(route polyline)cum_distance_m[]andcum_time_s[]aligned to polyline pointssteps[](maneuvers derived from bearings + street-name changes)- totals:
total_distance_m,total_time_s
The frontend displays:
- Next instruction and distance to next maneuver
- Current street
- ETA remaining
- Remaining distance
Simulation profiles (demo mode)
Simulation pacing + UI emphasis can change by scenario:
- Routine
- Trauma
- Cardiac Arrest
(In production, this could be derived from dispatch type + policy constraints.)
5) Algorithmic Core: Duan–Mao (BM-SSSP) vs Dijkstra
Baseline: Dijkstra
Dijkstra’s algorithm is the reliable workhorse for non-negative edge weights and is excellent in practice on many graphs.
Experimental accelerator: Duan–Mao BM-SSSP (“Breaking the Sorting Barrier”)
Recent research introduces a deterministic directed SSSP algorithm with improved asymptotic runtime in certain models, often described as “breaking the sorting barrier.”
How Aegis uses this responsibly
- Default: Dijkstra (robust and predictable)
- Optional: BM-SSSP runner (Node/TypeScript) as an accelerator path
- Fallback: if BM-SSSP fails or overhead dominates, Aegis falls back automatically
Why this matters for emergency response workflows Routing is rarely “compute once.” In an operational setting, you can have:
- closures/incidents forcing reroute
- repeated “nearest facility” queries
- multi-unit planning extensions
A faster recompute path can reduce time-to-care when routing triggers frequently.
Realism note: On small subgraphs, asymptotic wins may not appear due to constants/overhead.
That’s why Aegis ships both and benchmarks them visibly.
6) Algorithmic Race: Telemetry + Benchmarking
Aegis includes an Algorithmic Race mini-map that visually compares:
- explored “footprint” (what the search touches)
- final path
- speed and consistency
Expanded overlay includes
- KPI header strip:
- Winner
- Speedup (×)
- Explored Δ
- ETA Δ
- Trend lines:
- explored edges over time
- completion % over time
- Histograms:
- route segment-length distribution
- benchmark exec-time distributions (RUN 20×)
This is intentionally designed as a “Bloomberg-style” evidence display when asked:
“What is this algorithm?”
“Does it actually help?”
“When is it better?”
7) Tech Stack & Architecture
Frontend
- Vite + React + TypeScript
- TailwindCSS
- MapLibre GL (OSM-friendly, open source)
- Recharts for telemetry charts
Backend
- FastAPI (Python) with interactive docs at
/docs - OSMnx + NetworkX for graph retrieval + routing
- Optional BM-SSSP runner (Node/TS) for Duan–Mao path
- AI endpoints:
- Gemini (assistant)
- optional ElevenLabs (TTS)
Data layer (future-proofing)
The prototype runs without persistent storage. Planned sponsor-friendly expansions:
- immutable mission logs (“black box” replay/audit)
- operational JSON stores (incident payloads, patient packets, device telemetry)
- event streaming (WebSockets now; later Kafka/PubSub)
8) Repository Structure
.
├─ docs/
│ └─ algorithm_for_map.pdf
├─ backend/
│ ├─ .env.example
│ ├─ requirements.txt
│ ├─ bmssp-runner/
│ │ ├─ package.json
│ │ ├─ run.mjs
│ │ └─ server.mjs
│ └─ app/
│ ├─ main.py
│ ├─ services/
│ │ ├─ gemini.py
│ │ └─ voice.py
│ └─ algorithm/
│ └─ router.py
└─ frontend/
├─ package.json
├─ vite.config.ts
└─ src/
├─ App.tsx
├─ components/
│ ├─ Map.tsx
│ ├─ AlgoRaceMiniMap.tsx
│ ├─ AlgoRaceCharts.tsx
│ ├─ AlgoBenchmarkCharts.tsx
│ └─ panels/...
└─ constants/...
9) Setup & Commands
Full step-by-step instructions live in
README.md.This section is a concise doc-friendly reference.
Backend
cd backend
python -m venv .venv
# macOS/Linux:
source .venv/bin/activate
# Windows PowerShell:
# .venv\\Scripts\\Activate.ps1
pip install -r requirements.txt
uvicorn app.main:app --reload --port 8000
Frontend
cd frontend
npm install
npm run dev
Optional: BM-SSSP runner
cd backend/bmssp-runner
npm install
10) Demo Script
Global notes
- Default start location is pre-set (demo-friendly).
- Judges can type a destination → Aegis computes a real route and simulates movement.
- Aegis should fail gracefully (fallback routing, safe UI).
Stage 0 — IDLE (Standby)
Goal: prove “real navigation loop.”
- open Aegis
- enter destination (hospital/POI)
- GO → route draws → vehicle follows polyline
- toggle follow camera
Suggested judge prompts
- “Summarize route status in one sentence.”
- “What’s the next maneuver and ETA?”
Scenario 1 — Cardiac Arrest (High Priority)
Goal: show urgency UI + AI protocol bullets.
- Red Alert style (high contrast, bigger nav)
- Patient/vitals panel enabled (clearly labeled simulated)
Suggested AI prompts
- “20-second CPR checklist. Bullet points only.”
- “Adult cardiac arrest epi dosing guidance (concise).”
- “Provide ED handoff summary template.”
Scenario 2 — MVA Trauma (Scene → Load → Transport + Reroute)
Goal: show state transitions + disruption reroute. Timeline:
- Navigate to scene
- On-scene pause (“loading patient”)
- Patient loaded → trauma mode
- Inject road block → reroute computed
- show updated ETA and nav steps
Suggested AI prompts
- “ABCDE rapid trauma assessment checklist.”
- “Hemorrhagic shock warning signs during transport.”
11) Professional Disclaimers
- Prototype only: not a certified system for clinical decision-making or dispatch operations.
- AI outputs: informational; users must follow official protocols.
- No PHI: do not input real patient identifiers into AI prompts.
- Map/data reliability: OpenStreetMap/Overpass/Nominatim are community services; production use requires offline caching and/or enterprise geodata.
12) Next Additions
- offline cached York Region graph (demo reliability + speed)
- closure/incident ingestion + auto reroute
- mission event logging + replay for training/compliance
- multi-unit selection (best unit by travel time)
- protocol cards + structured handoff generator
Appendix: Team Instigate Cafe
- Sukesan | Systems / Backend / AI integration
- Yazanth | Map / Routing / Simulation
- Sanchit | UI/UX / Frontend
- Nithursan | Data / Logging / Infrastructure
Built With
- autoprefixer
- axios
- carto
- css
- css3
- elevenlabs
- fastapi
- framer-motion
- gemini-api
- geopy
- html
- html5
- javascript
- jupyterlab
- mapbox-gl
- maplibre-gl
- mapquest-nominatim-search
- matplotlib
- networkx
- node.js
- npm
- numpy
- openstreetmap
- osmnx
- overpass-openstreetmap
- pandas
- postcss
- pydantic
- python
- react
- react-map-gl
- recharts
- scikit-learn
- tailwindcss
- typescript
- uvicorn
- vite






Log in or sign up for Devpost to join the conversation.