Inspiration
Standard navigation apps like Google Maps or Waze prioritize speed, but for many, the "fastest" route is actually a dead end. For individuals with mobility challenges, a single set of stairs or a steep incline is a total barrier.
What it does
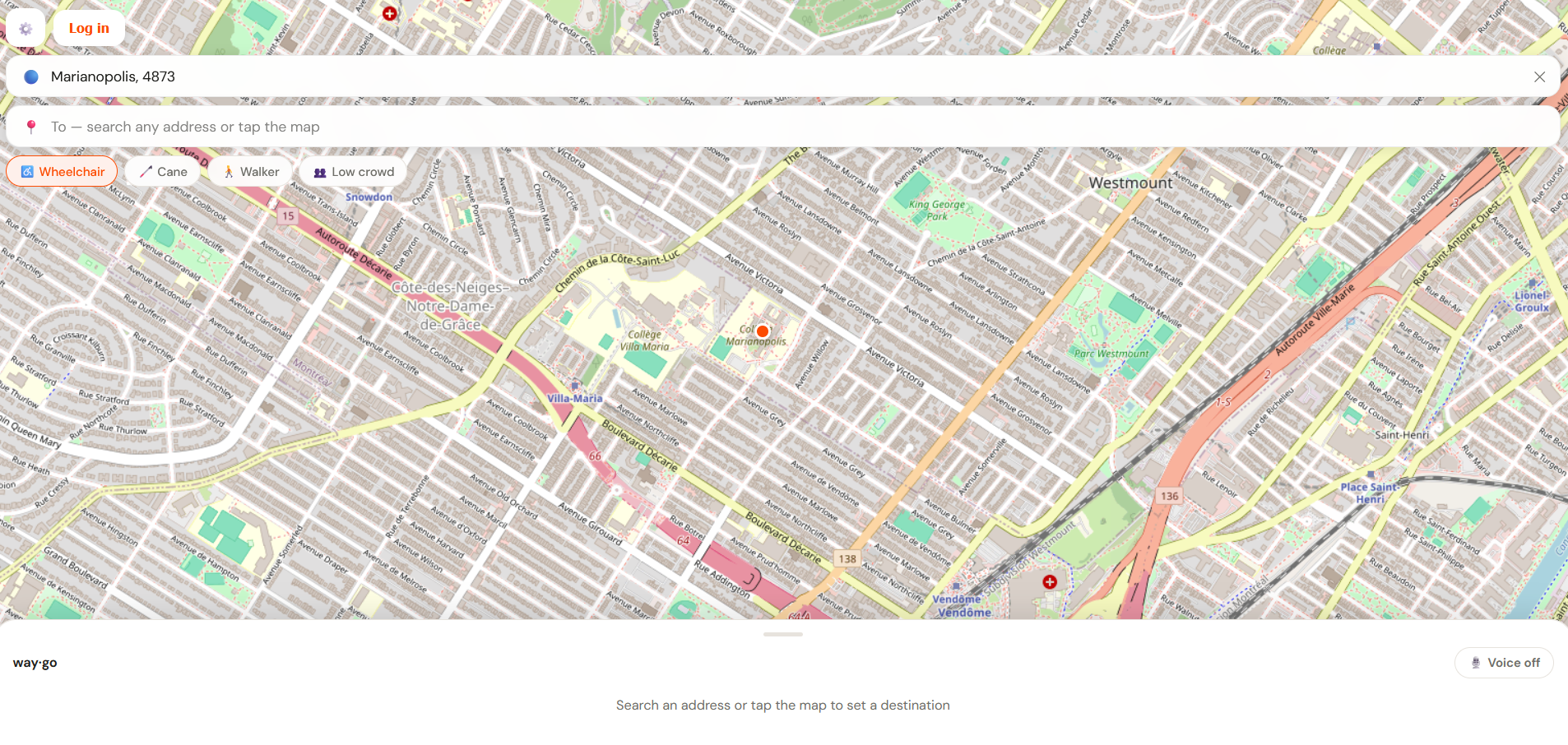
Rollz is a specialized navigation engine designed to put accessibility first. Built on OpenStreetMap and OSRM, our platform allows users to filter for paths based on their disability. By transiting through the lens of mobility, we ensure that anyone can access their ceramic cafe safely and easily.
How we built it
- The Engine: We use OSRM to process routing, allowing us to customize cost factors for obstacles like stairs and slopes.
- The Data: Powered by OpenStreetMap, we tap into community-driven metadata that includes sidewalk widths and incline levels.
- The UI: A clean, accessible Leaflet-based map.
Challenges we ran into
It was time consuming to find a reliable open-source map dataset which contained the information we wanted. Implementing it was a hassle as well as this was our first time working with OpenStreetMap and its API.
Making a custom cost function was also difficult, although it was really cool when it worked in the end!
Accomplishments that we're proud of
We managed to connect multiple APIs in chain which didn't always together out of the box. The cost function takes in four parameters depending on the user's transit mode (wheelchair, cane, etc) and chooses the best path accordingly. The user can also create a persistent profile because why not!
Built With
- leaflet.js
- nextjs
- openstreetmap
- osrm
- react

Log in or sign up for Devpost to join the conversation.