-
-

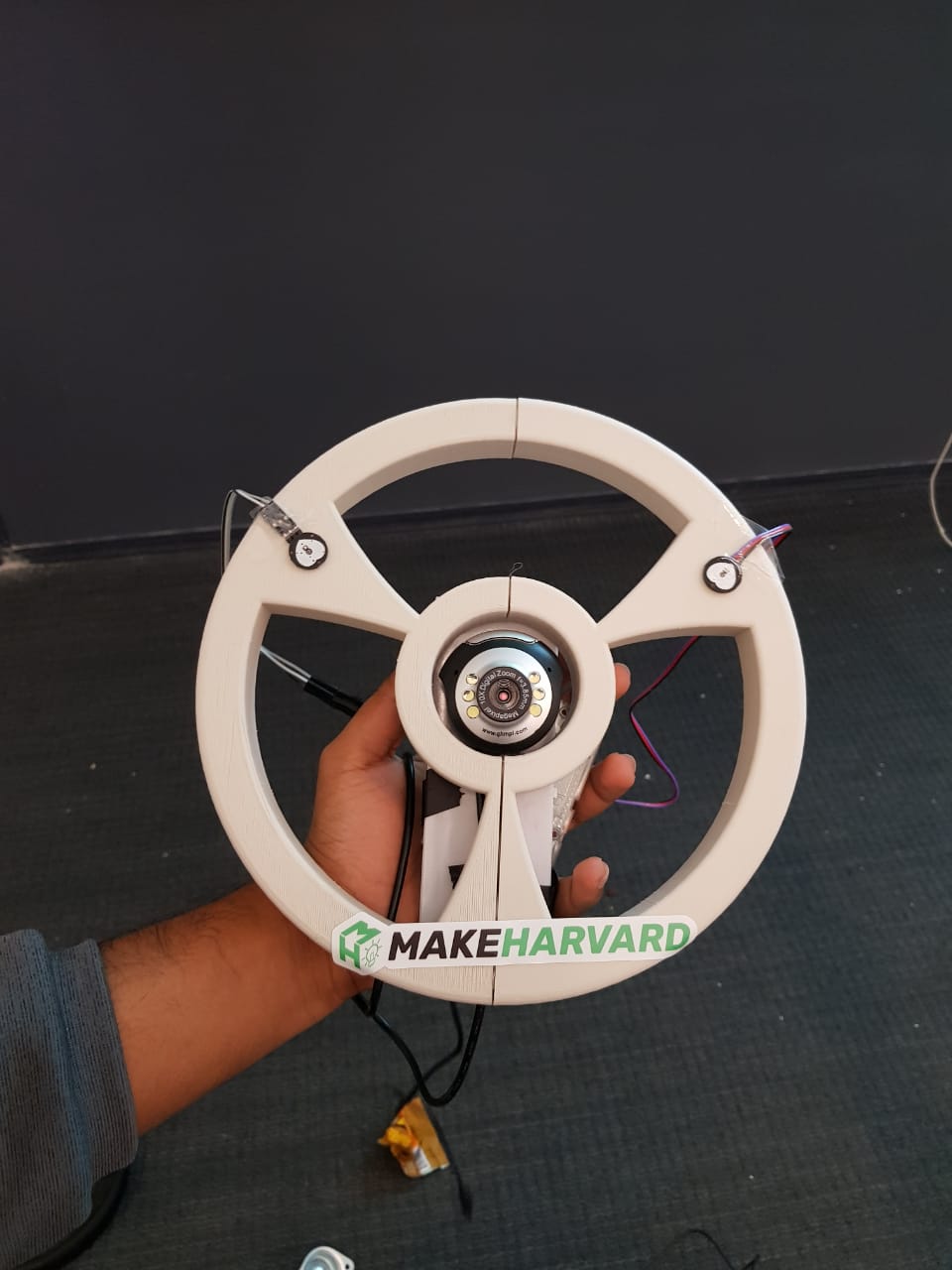
The Steering Wheel
-
Notification
-

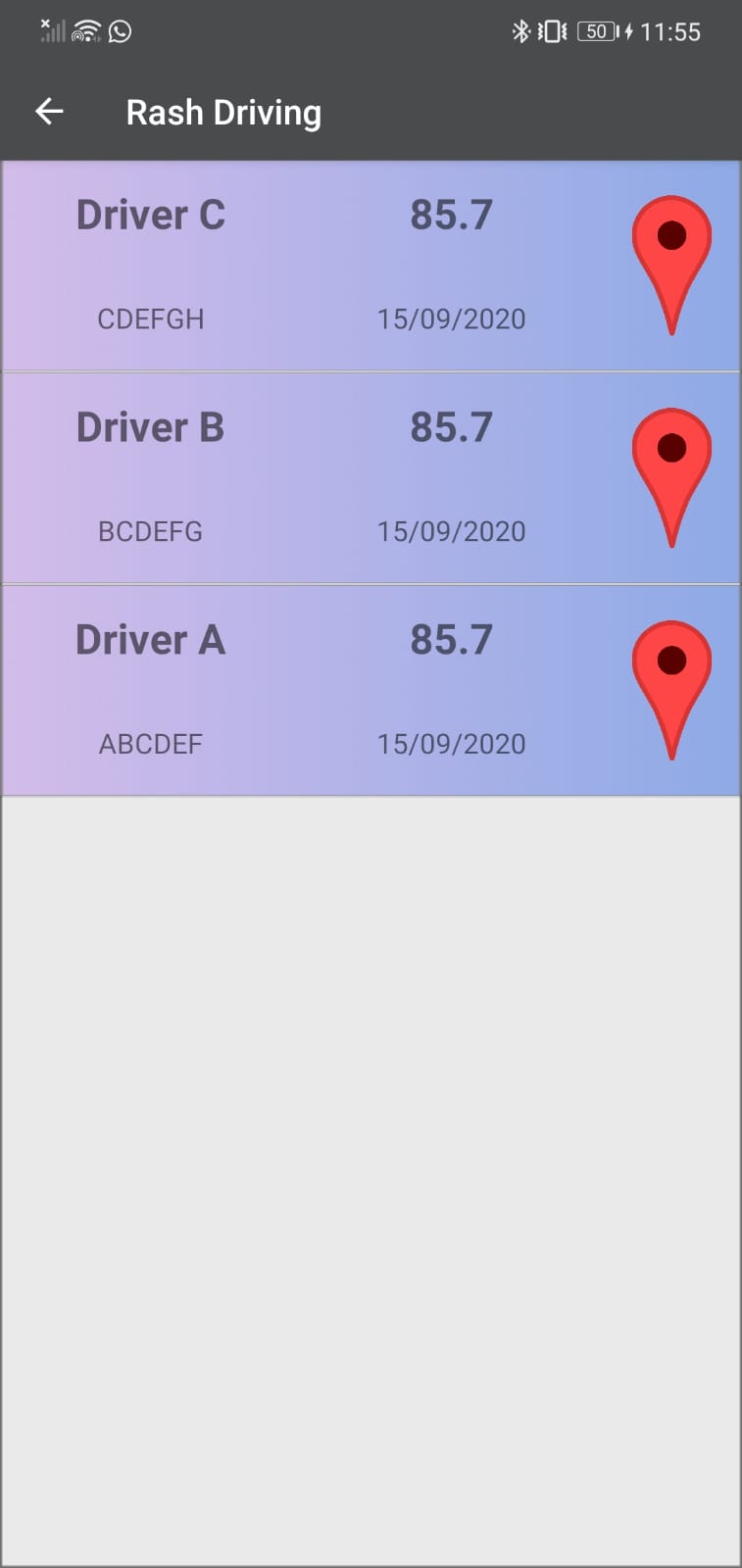
List view of all current drivers
-

Map location

Inspiration
More than 3 million accidents occur every year in the US alone. Most of the accidents happen because of fatigued and sleepy drivers. So we thought we'll make a smart steering wheel that can alert and limit the speed of the vehicle if the driver is sleepy.
What it does
It uses machine learning and computer vision to find out if the driver is sleepy then limits the vehicle's speed and alerts the driver. It can even analyze crashes and send notifications to friends through a mobile application.
How we built it
We trained a deep learning model on tired, sleepy and normal faces that have an accuracy of over 90%. We are running it on a Jetson Nano. We are using an accelerometer and a gyroscope to detect crashes and send it to the emergency contact with their location. Notifications will be sent to the mobile app and the users can view the drivers' location.
Challenges we ran into
- We couldn't get the Jetson nano connected to any monitor, so we had to use a projector.
- We had trouble training the sleep/fatigue detection model.
- We had trouble getting it all work seamlessly.
- We had no experience in using GPS sensor prior to this hack.
Accomplishments that we are proud of
- Getting it to work.
- Completing it without any sleep.
What we learned
- How to properly use Arduino as an ADC to use with other devices and controllers using PySerial.
- Deploying machine learning models on edge devices.
What's next for SteerSense
- Embedding the setup in a car and implementing it for testing.
- Bringing the tech to car manufacturers.
Built With
- accelerometer
- android
- arduino
- camera
- computer-vision
- firebase
- google-cloud
- gps
- jetson-nano
- machine-learning
- pulse-rate-sensor
- python
- solidworks
- tensorflow








Log in or sign up for Devpost to join the conversation.