-
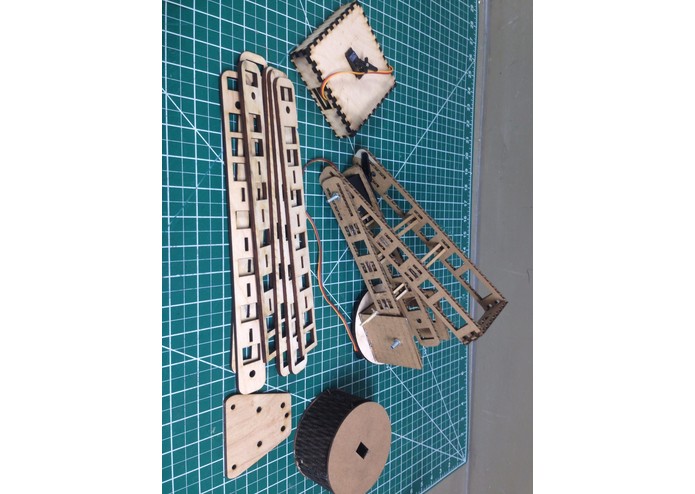
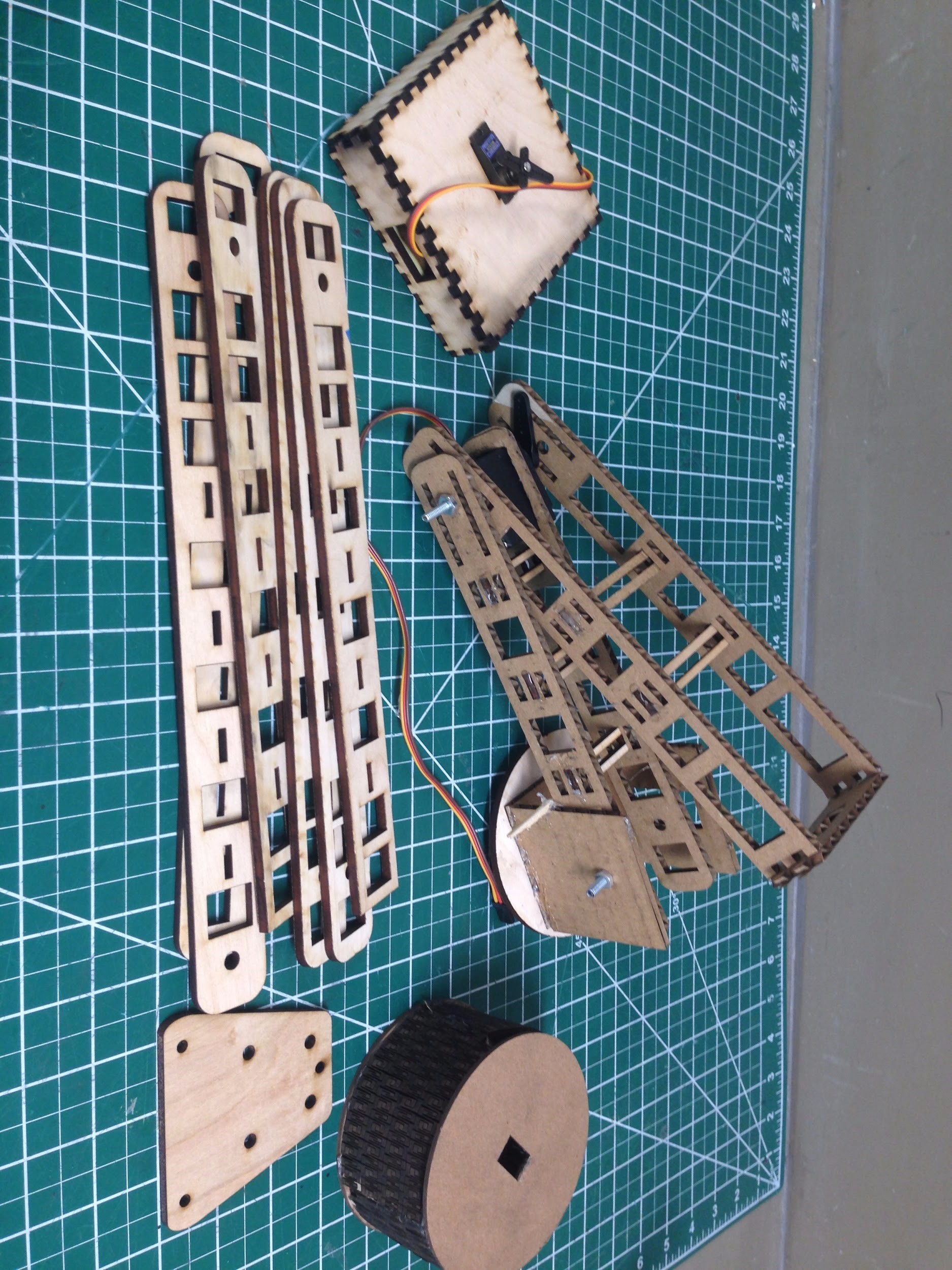
Construction Phase
-
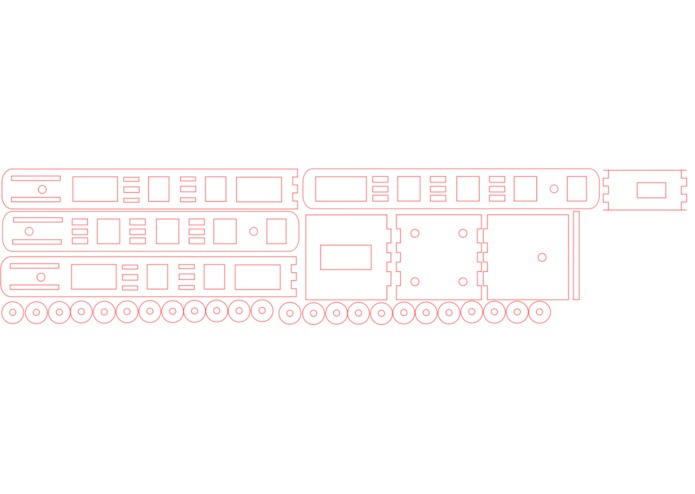
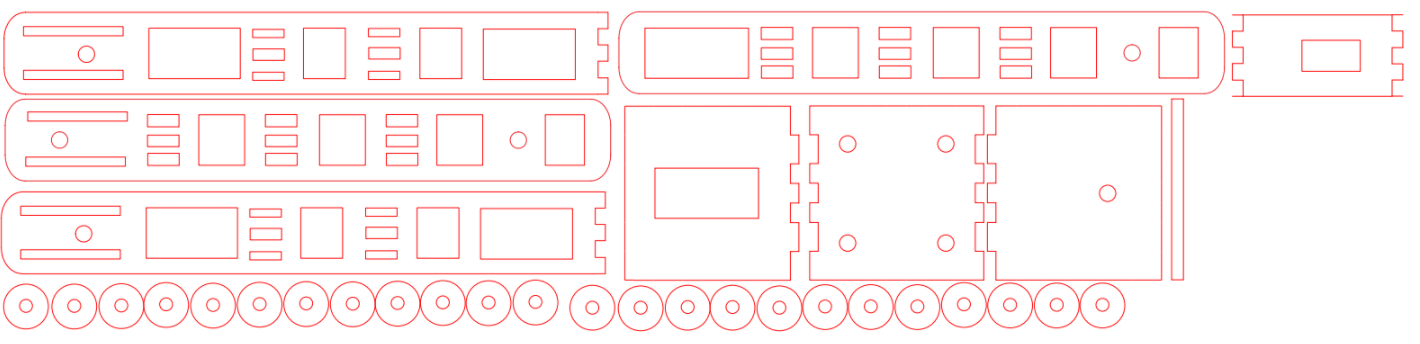
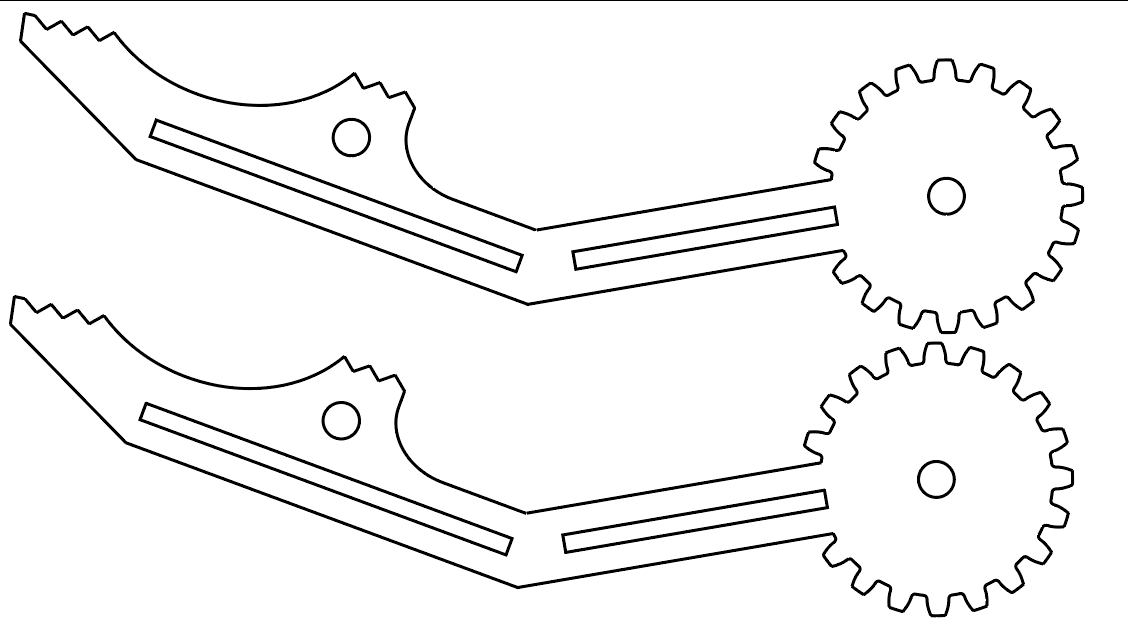
Illustrator Files
-
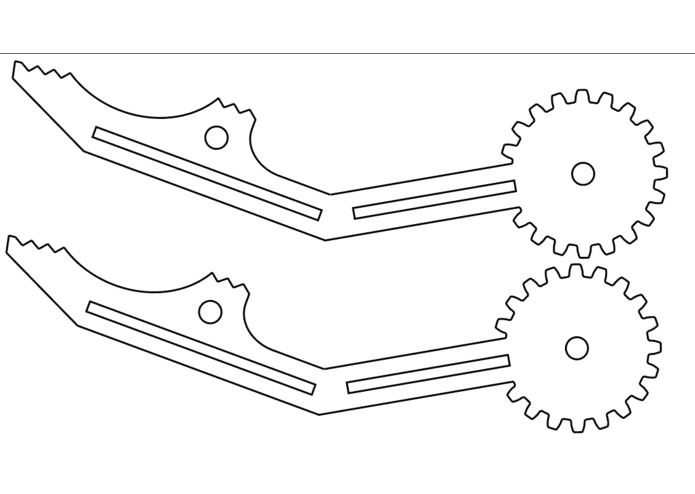
Illustrator Files
-

SolidWorks Design
-
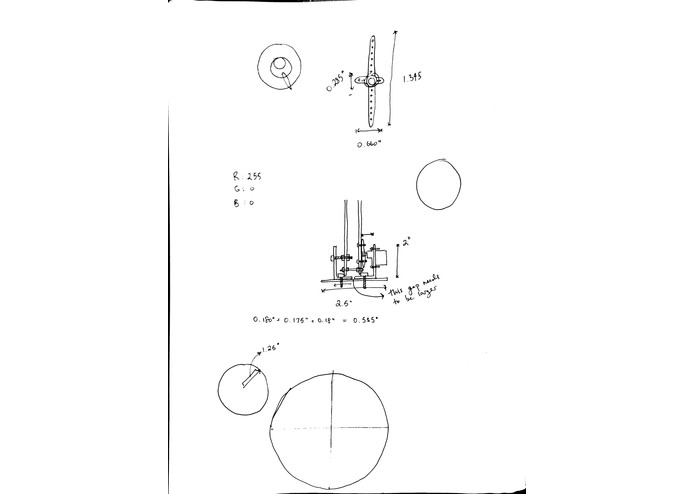
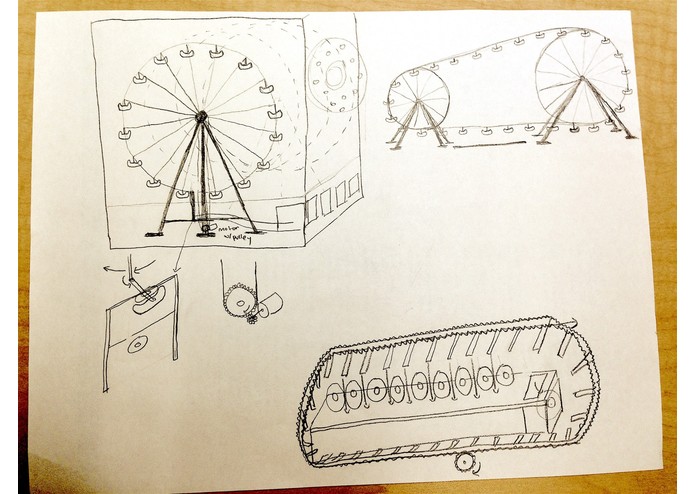
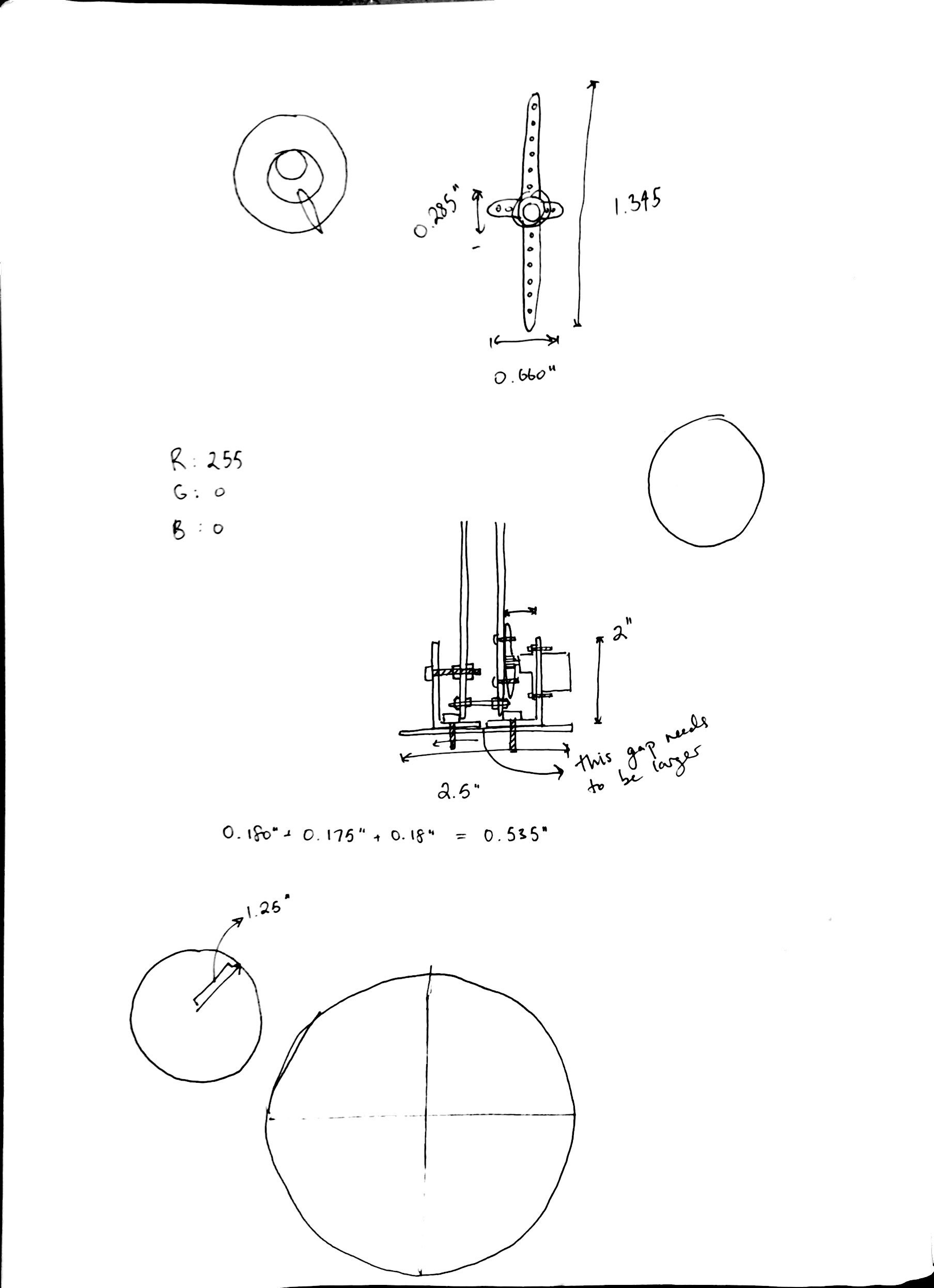
Initial Sketches
-
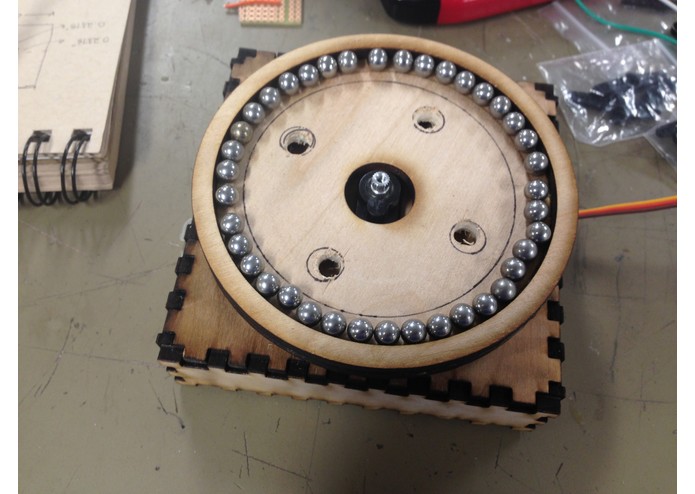
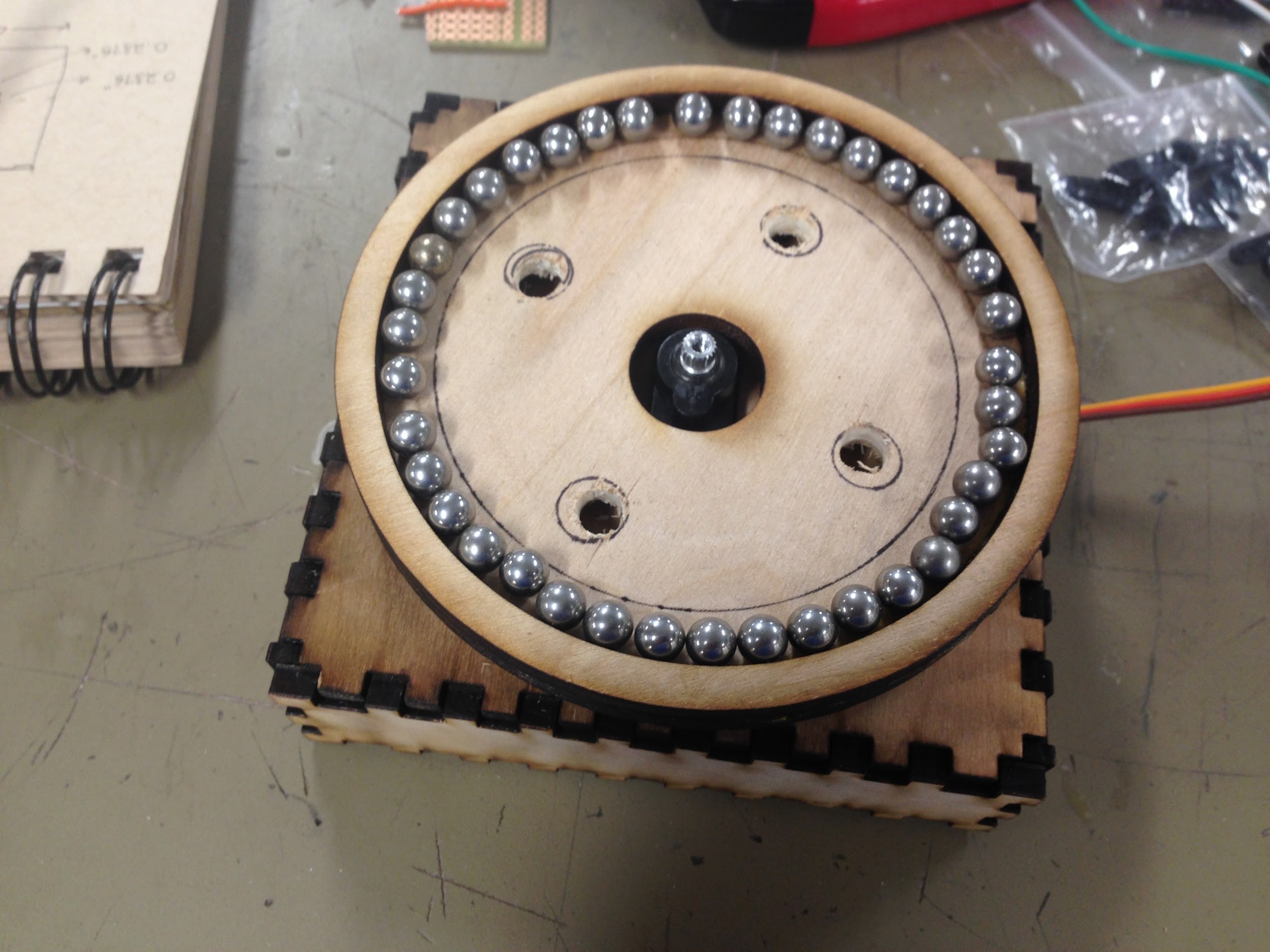
Base
-
-
Donut Machine

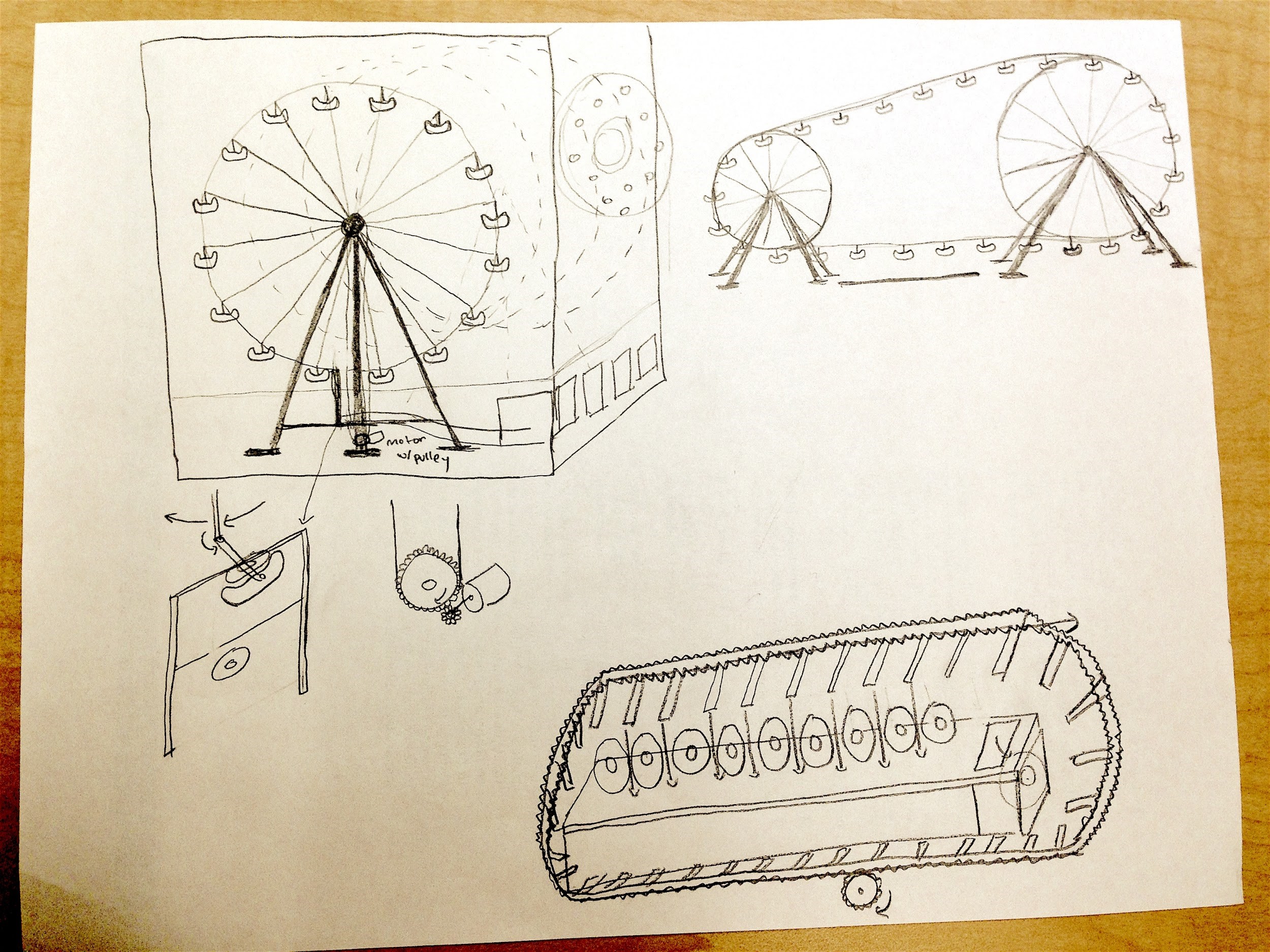
Inspiration
The purpose of the final design project was to design and construct an interactive robot in which multiple actuators could be controlled by user input from a potentiometer. We wanted to put this arm in a creative and challenging environment. Our hungry design group landed on the idea to build a robotic doughnut vending machine.
What it does
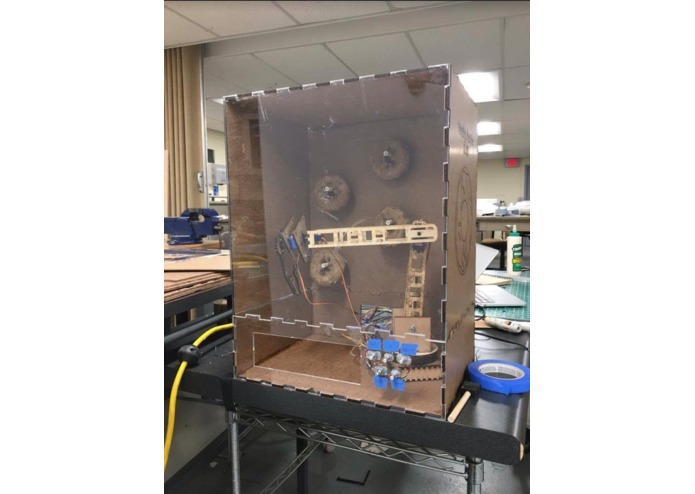
This design lets the user control the machine to select and grab donuts by controlling the robotic arm. It is a game of agility and the ability to properly balance the weight of the doughnut and different sections of the arm to successfully retrieve the treat. There are five servo motors that control the movement of the arm. The base of the arm can rotate 180 degrees. The body of the arms move longitudinally in the a 2D plane, while the claw(the mechanism that actually grabs the doughnuts can rotate 360 degrees in a plane perpendicular to the body of the arms. Each servo is controlled by a potentiometer. When the user turns the dial, the servo changes and consequently changes the position of the arm. Once the doughnut is grabbed, it is dropped in a chute to be retrieved by the user.
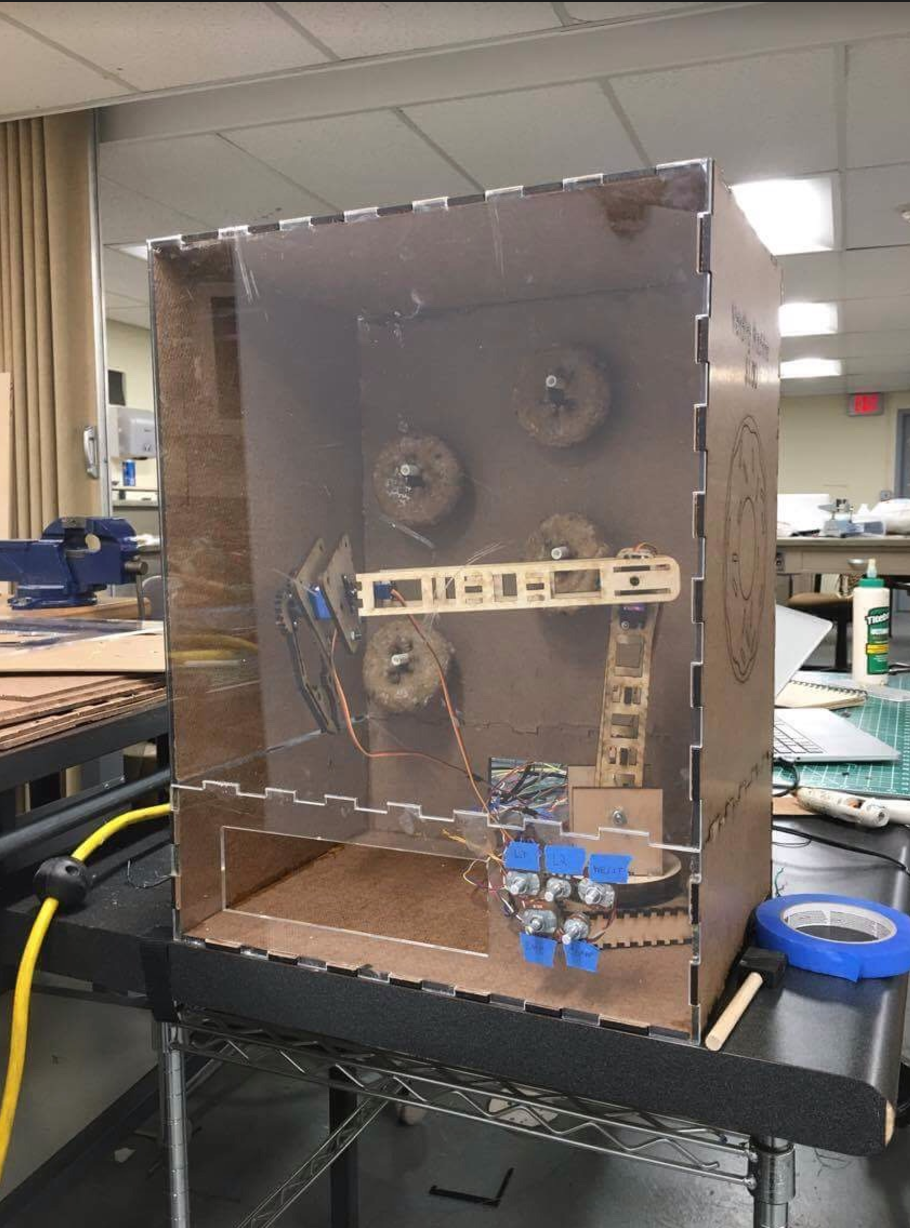
How I built it
This was a combination of Hardware, Software and Physical Form-Factor. The process began with intense brainstorming. The form factor and the mechanics it would take to make the robotic arm were discussed. Ultimately, there is a casing that holds the assembly. The robotic arm sits in the bottom of the display made of masonite and clear acrylic on the front. PVC pegs designed to hold the doughnuts were glued to the inner-back wall.The potentiometers were embedded on the front acrylic face of the casing so that the user could directly interact with the knobs. Both the robotic arm and casing were modeled in Adobe-Illustrator and then laser cut out of plywood. This process was iterated almost 10 times until the final design was perfected. The arm's claw modeled on SolidWorks and then 3-D printed. The circuitry behind the scenes was all connected via Arduino. The potentiometers went to 5 separate Arduino Analog pins. The design was programmed on the Arduino platform to make the doughnut dispenser work.
Challenges I ran into
The circuitry and claw of the robotic arm were the most difficult parts. We iterated through many arm designs because the Servo motors were not strong enough. The design got simpler as time went on because of time constraints. The device lost the autonomy that we wanted to incorporate in the beginning.
Accomplishments that I'm proud of
I am proud that we were able to retrieve a number of doughnuts with the design after hours of work.
What I learned
I learned how to integrate demux chips with potentiometers and photo diode light resistors. I also gained a lot of experience with Adobe Illustrator and just generally wood work designs.
What's next for Robotic Arm Project
We are refining the design so the user can simply point a laser and the doughnut is retrieved automatically by the arm.
Built With
- 3d-printing
- adobe-illustrator
- arduino
- lasercutting
- solidworks

Log in or sign up for Devpost to join the conversation.