-
-
Razer-Hospital Management Robot
-

robot
-
circuit diagram
-

ui design
-

robot




Inspiration
COVID 19 has had a tremendous impact on all our lives and a lot of FRONT-LINE WORKERS. The lack of safety instruments and technology has cost them dearly. So, we designed Razer the hospital management robot to automate some of their works by moving medicines and food to the patients thereby avoiding physical contact and less frequent visits. It can be used at home as well.
What it does
The robot is autonomous/smart phone controlled (via android application). It works over Wi-Fi rather than Bluetooth so that there’s a better coverage. It can avoid certain obstacles as well. It is cost effective as it is built from abandoned stacks. It can carry objects that can weigh up to 10kgs and still manage to travel steady. The robot can be voice controlled via the application but we do have the manual arrows as well.
How we built it
There are two aspects to consider while describing the making of this robot – HARDWARE and SOFTWARE.
HARDWARE:
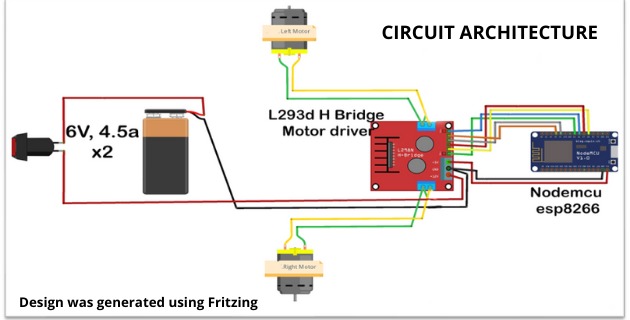
There are 4 major components.
- NODE MCU – We have got this so that it can work wirelessly.
- L2393D H BRIDGE MOTOR DRIVER
- 50 RPM GEARED MOTOR – we have limited its speed to obtain maximum stability and to make sure that everything is transported in shape.
- TWO 6V, 4.5A BATTERY – just a little bit of juice to power up the robot but you can power up the robot for 2 hours on a single charge whereas it will take one hour to fully charge the battery depending upon the usage.
SOFTWARE:
We have programmed the nodemcu to do basic operations like moving forward, back and the sides using Arduino IDE. We used C++ for programming it. We used MIT app inventor to design the android application with manual arrow keys and voice controls. The application is secure as it keeps track of the IP address.
Challenges we ran into
Being sophomores, this was our first attempt to work on a project at this scale. One of the challenges that we ran into was that there was some delay in receiving the commands. The robot won’t stop immediately when we press the stop button. So, we tried with different delay times and finally settled with one. Then while designing the voice control nothing worked in the first go. It was all blank. After a couple of tries we were able to successfully use the Google voice assistant to receive the commands and make the robot to move accordingly.
Accomplishments that we're proud of
To be honest we are proud of everything we made!!! In the first go we never thought of controlling the robot by our voice. We only worked with the arrow keys. The final thought and try to add voice control made us all go WOW!!! Seeing the robot respond to our voice was far beyond our thoughts. But we finally made it and we are so proud of it.
What we learned
This was our first work in Arduino IDE. So, we had to go through a lot of learning and we did it. We also learned the comparative merits and demerits of different hardware components while we were designing it. Finally, we learnt the value of team effort and small progress. The small thoughts and ideas in the start and middle of our work were those which lead to this final product.
What's next for RAZER
We have planned to make the robot completely autonomous using machine learning and artificial intelligence with no manual control. So that the robot could rover around a specific room and act on gestures. We have also planned to add an SOS button since it can be used at homes where we have old citizens and hospitals.
Instructions to use
- Install and open the APK file in your android device.
- In the home screen choose your choice of control either manual or voice control.
Manual control:
- Use the arrow buttons to control the direction of robot’s travel and the stop button to stop the movement of the robot.
- Use the slider below to control the speed of the robot.
- Press the “Switch to Voice Control” button to switch to the screen where the actions of the robot can be controlled by voice commands.
Voice control:
- Press the microphone button and allow permissions to use device’s microphone.
- Press the “How to use” instruction button to check out all the valid commands to control the actions of the robot.
- Speak commands such as “go forward”, “turn right”, turn left” and “go back” to control the robot’s actions.
- Press the “Switch to Manual Control” button to return back to the original screen.
- Close the app.


Log in or sign up for Devpost to join the conversation.