What inspired you?
With our loved ones getting older, we've noticed the burden of taking daily medication. The process of opening the pill bottle, reminding how many pills are required, and carefully measuring out the dose is becoming troublesome for the elderly and seniors, and there aren't many solutions found on the market.
What it does
We decided to tackle the above issue by creating an an easy way to dispense medications accurately.
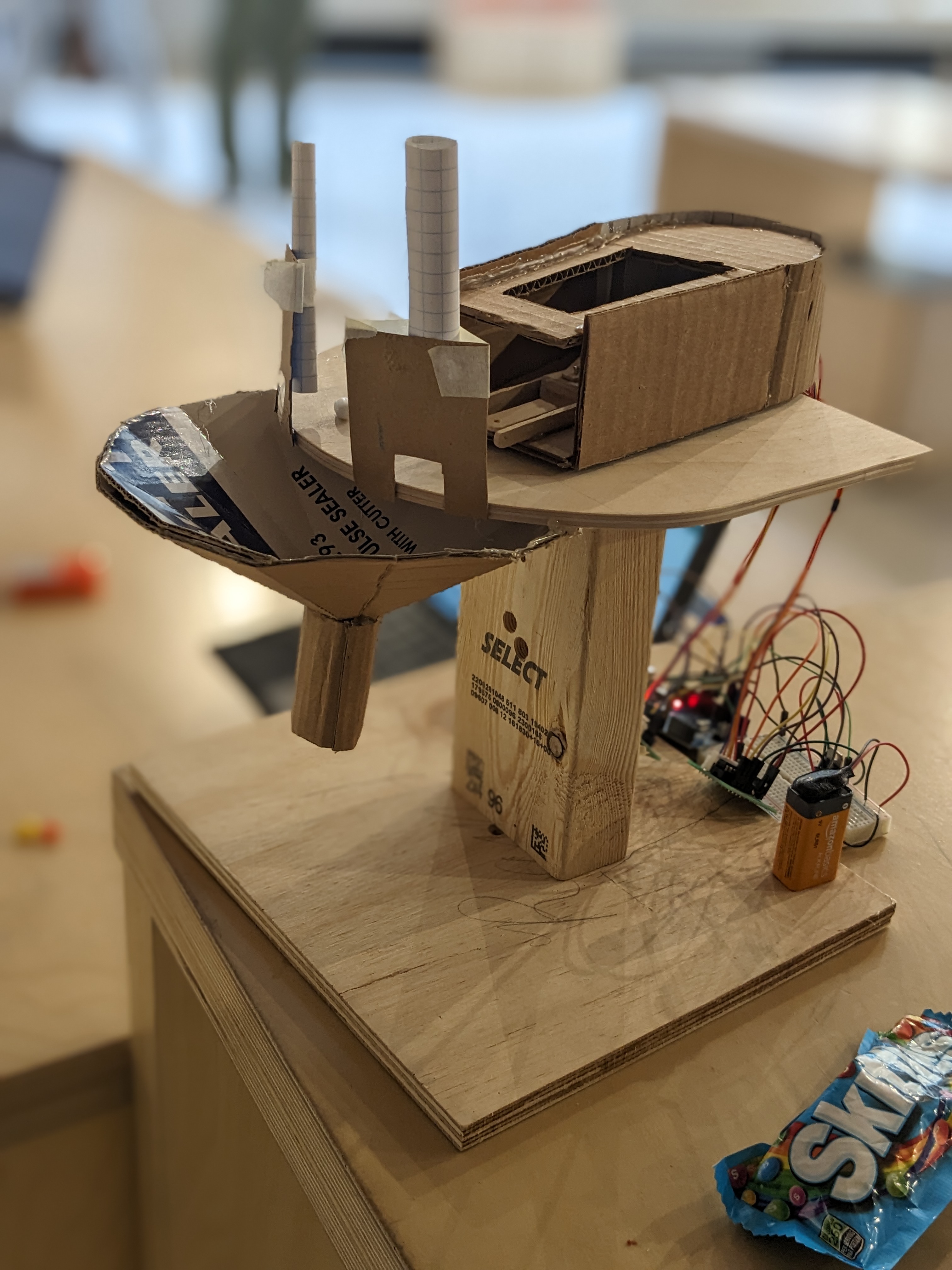
How we built it
We built this project using mechatronics. After extensive brainstorming, we opted to implement a large rotating arm connected to a Slider Crank mechanism. The rotation is powered by a stepper motor. Users would fill various tubes with their pills, and the arm would rotate to the corresponding tube. The slider crank mechanism then expels the pill into a hole. The user will place their hand or cup underneath the hole to gather their pills. Thus, the user will not need to manually count their medication.
Challenges we ran into
The greatest challenges we faced were determining how to dispense specific pill shapes accurately (i.e. in batches of two).
Accomplishments that we're proud of
Though there were many challenges we faced, we also achieved many accomplishments. We came up with a creative solution that isn't available on the market. Although all of us are in Mechanical Engineering, we're proud that we were able to successfully integrate electronics and programming into our design.
What we learned
Two of up learned how to use new power tools today! We both learned how to use a circle saw and bandsaw. We also became more comfortable with use power drills.
What's next for Poppin' Pills
Poppin' Pills is excited to apply their strengthened mechatronics knowledge to future projects!


Log in or sign up for Devpost to join the conversation.