Inspiration
Nowadays office buildings, warehouses, stadiums become bigger and more complex. Quite a few people find it confusing to easily navigate through this constructions.
One of many questions which Google asks its interns on interview is "How to go from point A to point B if you don't know the way?" Many interviewees answer "I will call a taxi". But what if both of those points are inside the same building? Navicce will easily solve this problem for you.
Just imagine – you have important meeting in office center, which consists of 6 buildings, each having 80 floors and over 60 offices on each floor. The only thing you know about your suggested destination is that you need to be in conference room 6 in office of company A. With Navicce all you have to do is to type this into the search field and find gyroscooter which will be provided for you. The system will take you right to the doors of mentioned office. While Navicce does all the job of navigating and transporting for you, you can even read news or get ready for the meeting.
What it does
Navicce uses indoor maps and autopiloted vehicles to help people find way to their destination in a building. The only thing user should do is to point his destination and go to the vehicle station – place where our vehicles are stored, which is located near places with biggest flow of people, such as entrances of the building or near elevators. After coming to the station, user just stands up on the vehicle and autopiloted system transports him to specified destination.
How we built it
There are three core parts of Navicce:
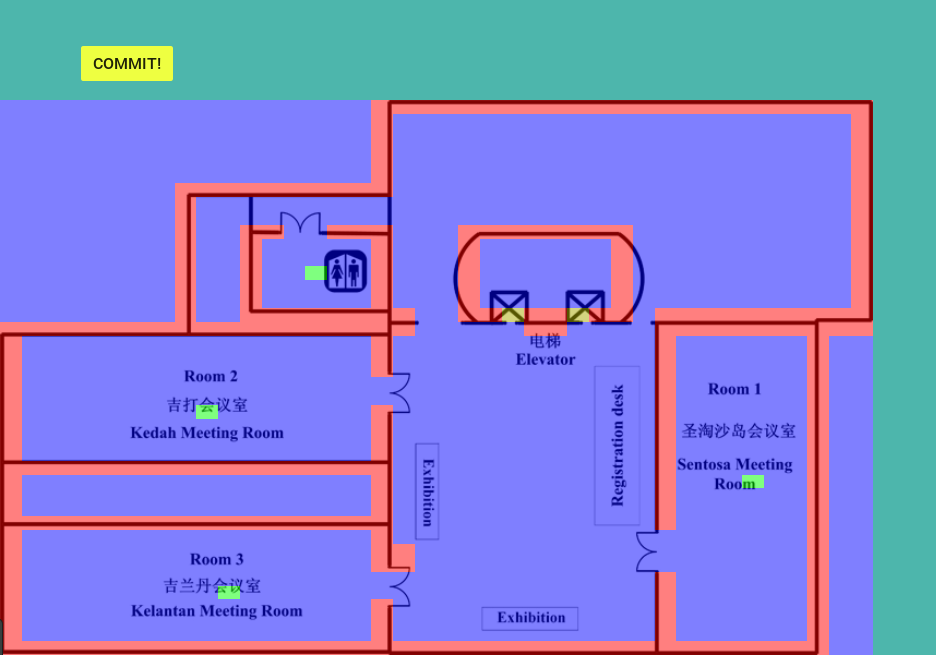
- Custom map builder. It allows owner of the building to create indoor map with our format in easy and fast way. It needs only map of building, which is usually already done for emergency purposes, and small amount of time to point out walls. (Unn.png)
- Routing. Our first choice for routing engine was EMBERS Routing API, which we wanted to scale down to one office center or even one building. Unfortunately, we found that Routing API works only with outdoor routing, but indoor routing can be a good way for further development. We implemented our own algorythm, which works on small example data, but we believe that we can integrate EMBERS API for further scaling to bigger buildings.
- Autopiloted vehicles. In conditions of hackathon, we were unable to create full-scale prototype of our system, but we found some ready solutions, implemented with piloted gyroscooters. It can be easily attached to our system later as we have all needed infrastructure.
Challenges we ran into
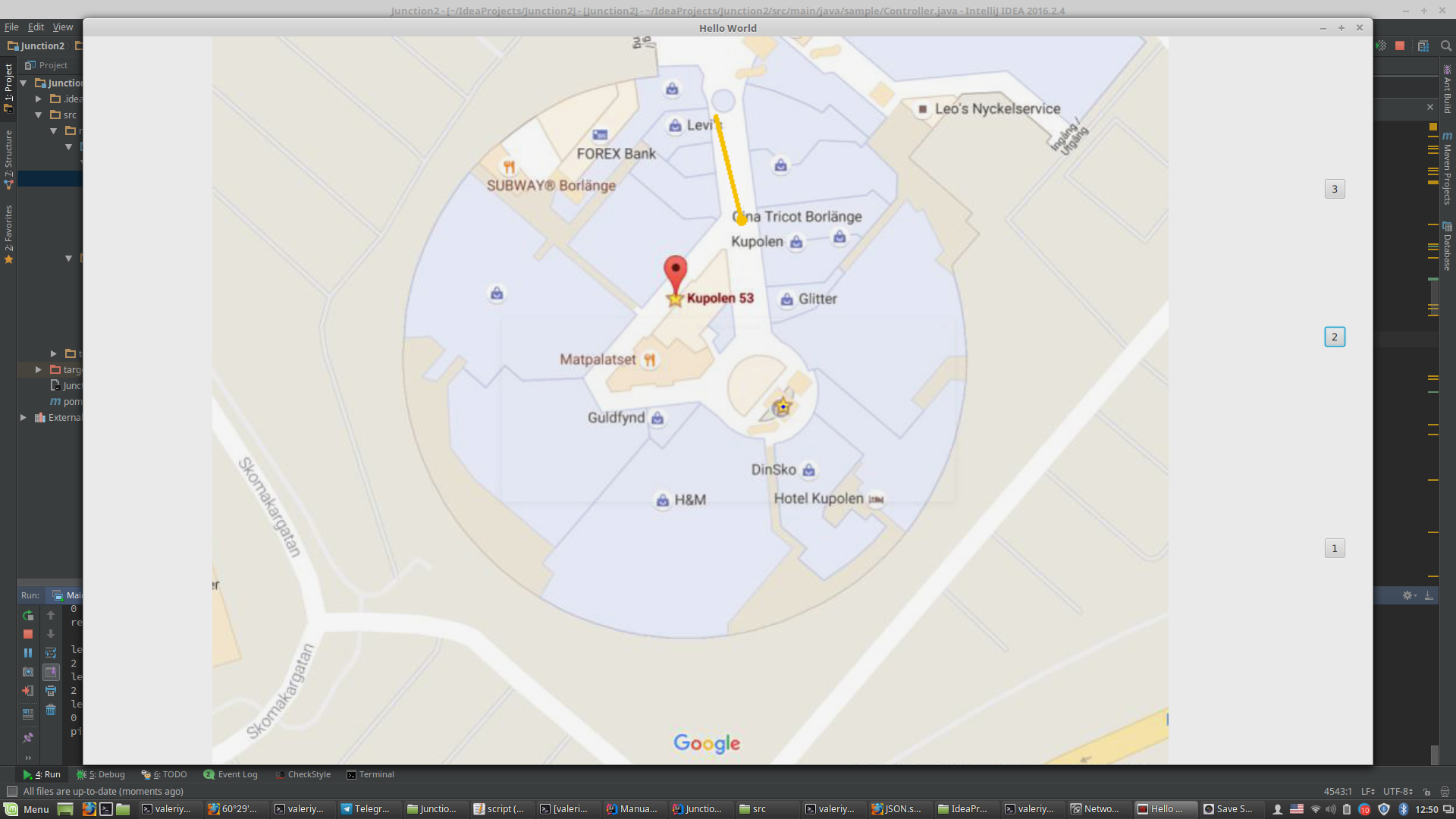
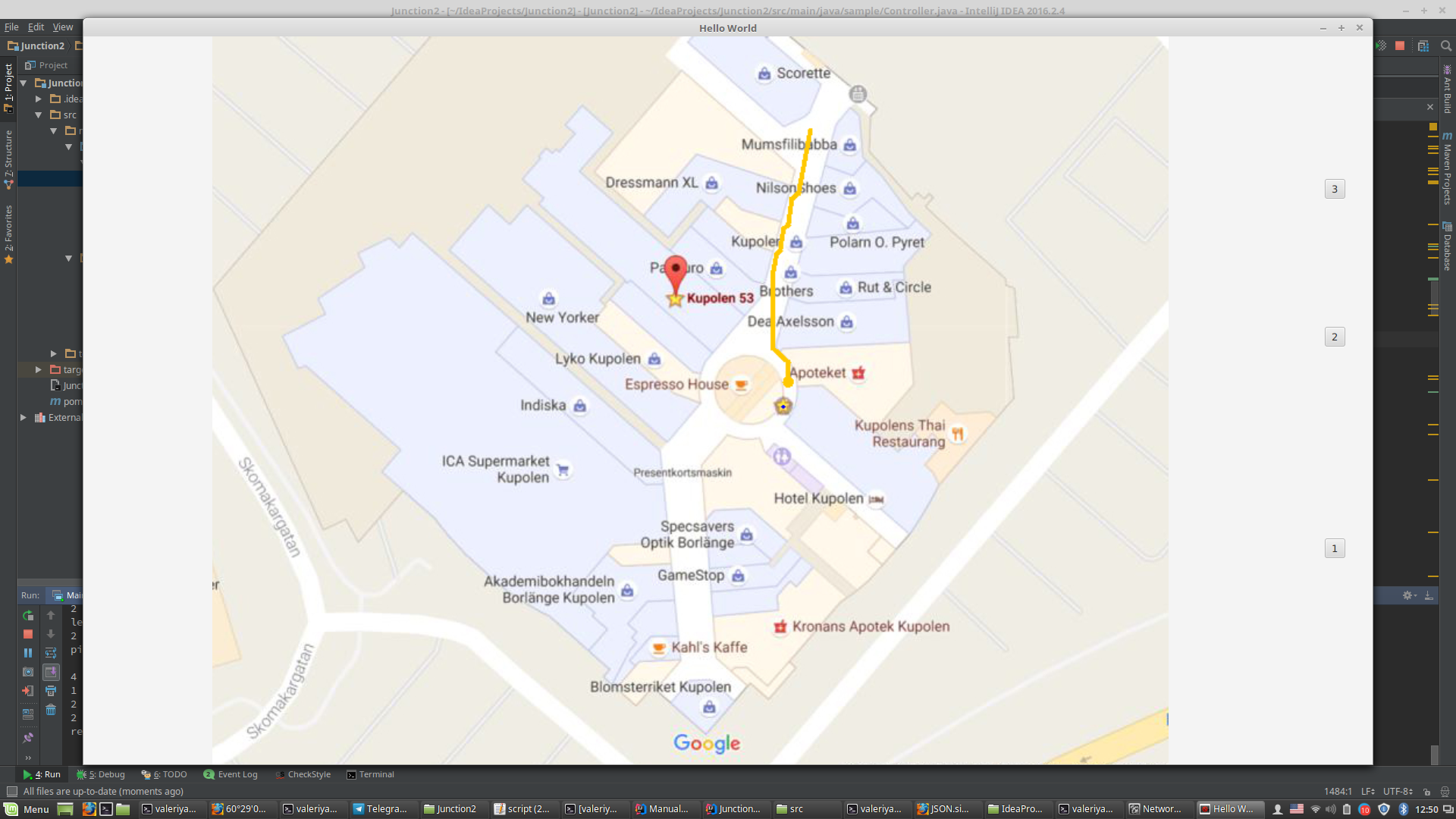
One of the main problems was to make our mobile application user-friendly. We are using Google Maps API with some pre-made indoor maps, but despite 4 years of development, indoor maps still work untstably on mobile platforms. Couple of tries of attaching EMBERS API were made, but we were unable to do it and custom route finding algorithm was developed. Our decision to create visualisation using JavaFX was last-moment, and it took a plenty of time to deal with relatively new technology for us.
Accomplishments that we're proud of
The platform that we developed now can easily be deployed to full-scale building with just a bigger amount of time then 2 days. Current prototype can show main functionality for user and demonstrate how vehicles and stations will interact.
What we learned
Working with foreign APIs can sometimes be hard and will need mutual involvement of both provider and user of API.
What's next for Navicce
Next steps will be:
- Developing hardware system for vehicle stations and vehicles itself. Combining ready solutions for piloting gyroscooters and developing our own technology to ensure user safety.
- Creating integration with EMBERS Routing API by exploiting OpenStreetMaps outdoor map encoding.
- Adding Parking and Traffic API for stations and routes respectively.
- Contracting with actual office buildings to deploy technology to real world.





Log in or sign up for Devpost to join the conversation.