Scheduling of multi-agent systems is a topical problem in AI and robotics [1]. We propose an algorithm for efficient and effective information gathering by drones in a real topological environment. Various types of information can be gathered – traffic information, facial recognition, etc. The algorithm manages the agents (drones) to acquire the maximum amount of information, considering limited resources.
Deliverables:
- An implementation of the algorithm
- A simulation suit for testing the algorithm
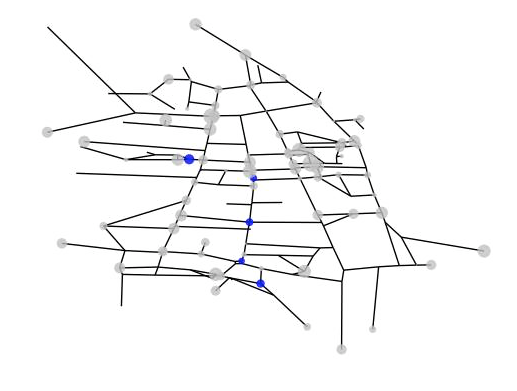
- A visualisation that combines data from the OpenStreetMap and the output of the simulation
- A tool for converting OpenStreetMap road networks into topological networks
- A RESTful API for 3rd party services
[1] Yu, Karaman, Rus – "Persistent Monitoring of Events with Stochastic Arrivals at Multiple Stations" http://arxiv.org/abs/1309.6041
Built With
- caffeine
- go
- matplotlib
- networkx
- openstreetmap
- python

Log in or sign up for Devpost to join the conversation.