-
-

Project Logo
-

Where the magic happens
-

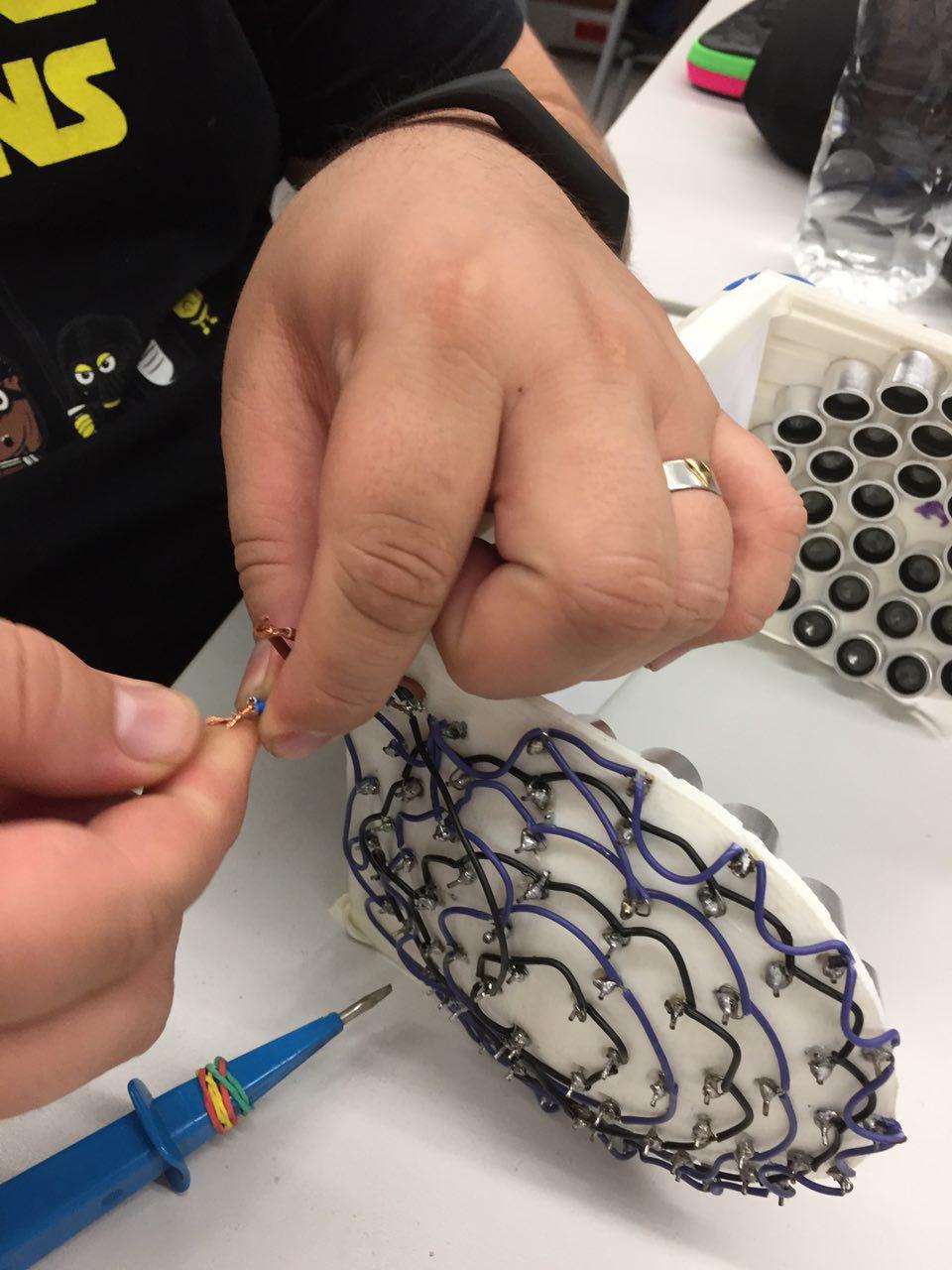
Building process
-

Building process



Inspiration
We got interested on ultrasonic waves applications after seeing the project Dubzooka at the last edition of HackUPC Winter. After that, we started doing some research and we discovered a paper on acoustic levitation using ultrasonic waves and we got fascinated by the topic.

And after doing some research on people applying the paper and doing real life ultrasonic levitation we started developing our own solution.
Even though it has no direct applications yet, after refining and improving the technology we believe it can be a revolution in medicine and chemistry for its applications on the management of dangerous non-polar substances on container-less environments.
What it does
By irradiating the space inside our levitator with strong hypersonic waves we create a pattern of interference such that it has some regions in which the different forces created by the mechanical waves compensate themselves and gravity. On those spots the configuration of the forces is such that it creates stable equilibrium points, allowing small particles (up to a density of 2.2 g/cm3) to defy gravity and levitate.
Its statistics, levitating particles up to 2.2 g/cm3 and 4mm of radius, are a huge improvement over the current levitations methods. On one side, we have optical trapping, which only allows particles with a radius up to 0.01-10 μm, and requires the material to be dielectric or optically transparent. And on the other side, we have magnetic levitation which, even though it allows levitating objects of a way higher size, it only allows levitating ferromagnetic particles, thus limiting a lot its application fields.
How we built it
We spent two days 3D-printing the main structure of the project at home before coming to the Hackathon. After that, once the hacking started we added the ultrasonic emitters and soldered all the components. Once the soldering was done, we started studying the wave pattern suggested by the paper and experimented on generating them with different technologies (a signal generator, plain electronics, and, finally, an Arduino).

After a lot of errors and experiments, we ended up finding the right pattern and phase of the signals sent to each cone of transducers, and started developing an API in order to monitor the levitator.
Challenges we ran into
It has been a huge challenge to struggle with the control of the interferences and to be able to finish the whole project in time during the Hackathon, we were working with a technology we were all unfamiliar with (as we all have CS background, and are not familiar with waves and interferences).
It was also a challenge to be able to verify its behaviour, as it's based on a super delicate equilibrium and the created spots are invisible and difficult to find.
Accomplishments that we're proud of
Well, it LEVITATES.
What we learned
We learned a lot on the process, the main thing being to generate whatever signal we needed with arduino, we improved our soldering skills, and we acquired a lot of knowledge about interference and mechanical waves.
What's next for LevioSound
Some of the future steps needed in order for the technology to be efficient would be:
- Improve its power and stabilisation.
- Add the possibility of moving the equilibrium spots.
- Find a way to visualize and mark the equilibrium spots for a specific particle.
- Improve the capacity of the levitator, allowing it to move heavier particles.











Log in or sign up for Devpost to join the conversation.