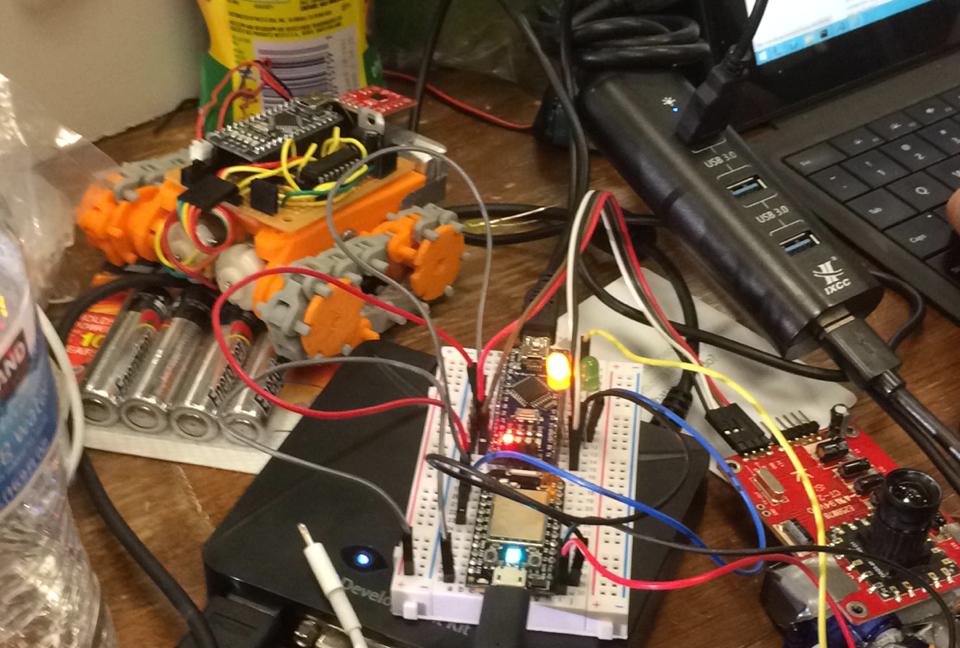
We have designed an interactive first person treaded robot designed for remote teleoperated exploration. This can appeal to a wide variety of users, from the child looking for a fun new toy to the search and rescue worker who needs a safe way of evaluating a situation to see if it is safe to proceed or not. The system features completely 3D printed chassis and treads, Microsoft Azure integration for remote connectivity, and the use of Oculus Rift and Myo for control and feedback.
IoT: Internet of Tanks
Control a tank using Oculus Rift and Myo from over the web
Updates

Leave feedback in the comments!
Log in or sign up for Devpost to join the conversation.