
Inspiration
Inspired by Automatic Packet Reporting System in order to create a mesh of sensors that could used to help guide devices in a variety of conditions using BLE communications.
What it does
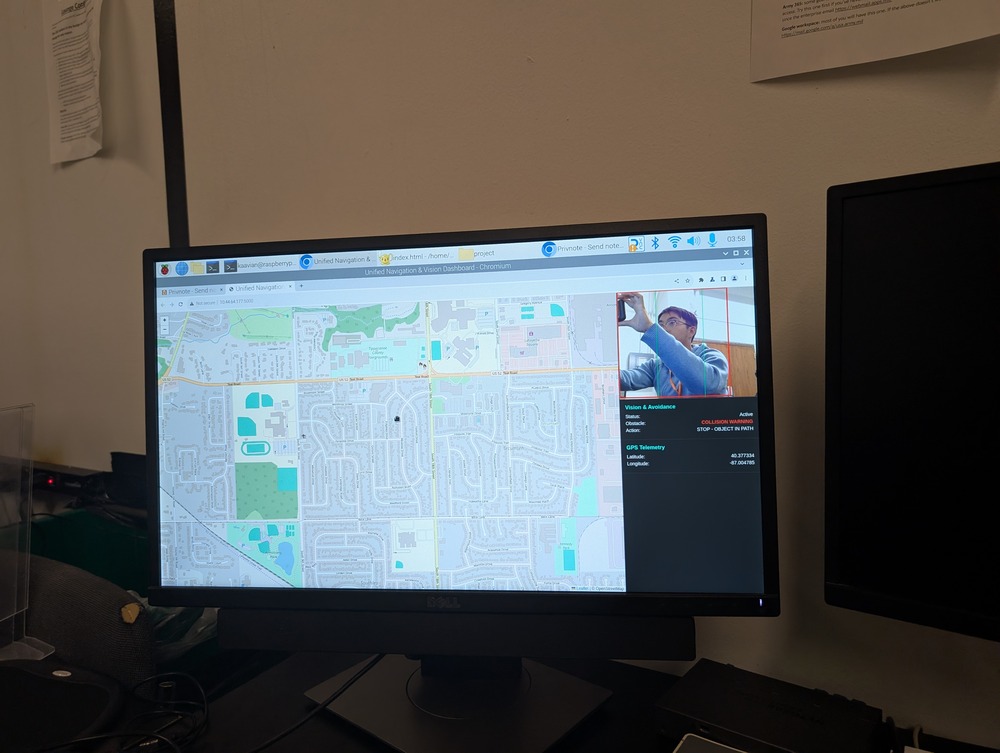
Utilizes sensor fusion of GPS, IMU, and Camera in order to provide full-scale understanding of motion and risks, along with BLE/ESP-NOW(WIFI) in order to communicate risks to other devices in order to aid navigation and motion.
How we built it
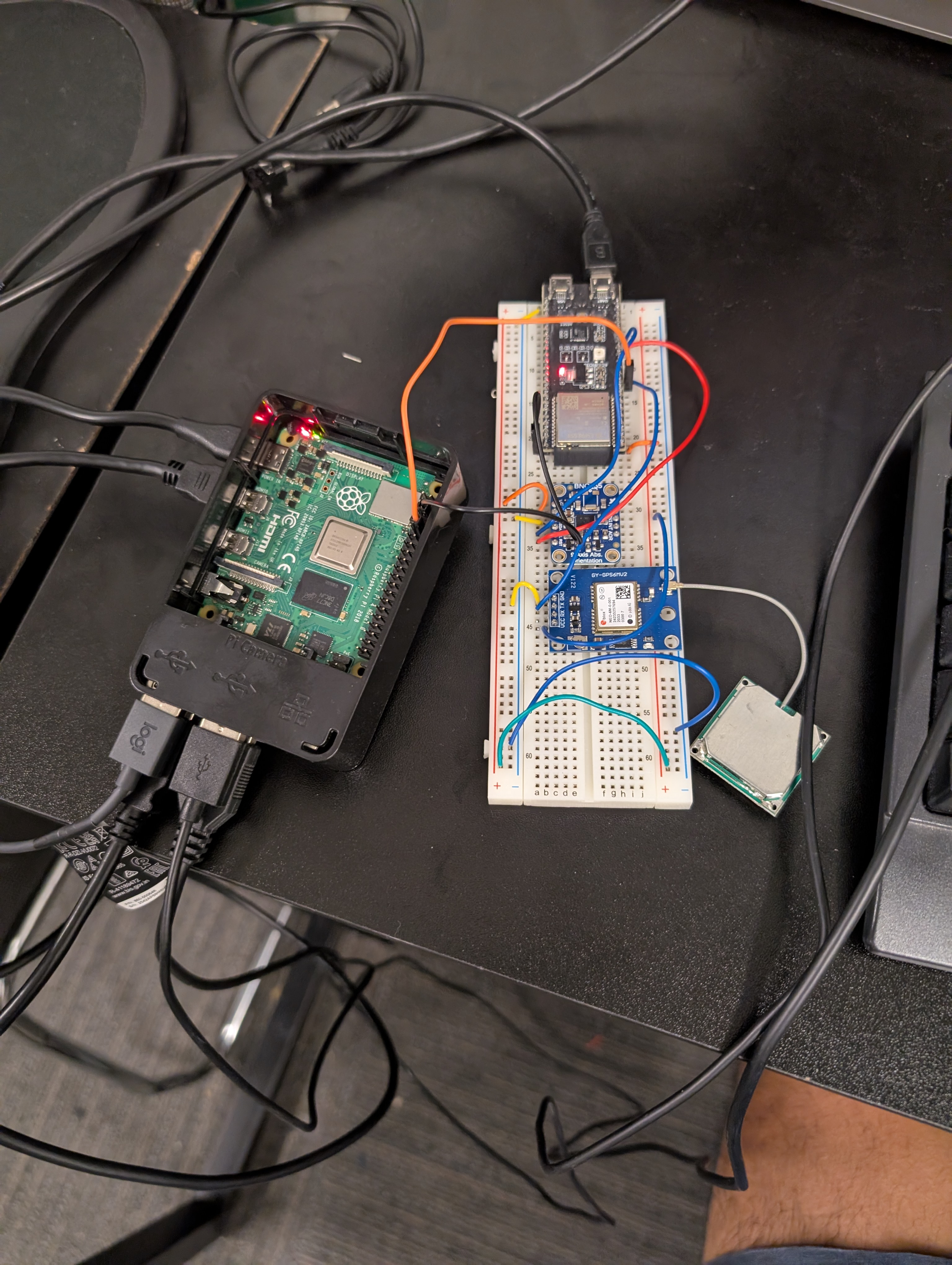
Utilizes Espressif ESP32 S3 Devkit, NEO6M GPS with Ceramic Antenna, 9 Axis IMU, Raspberry PI 4, and Logitech Web Cam. Developed on a PlatformIO Arduino Style Stack, with Flask(Python) based interface.
Challenges we ran into
Development Environment Issues along with opportunity costs related to time investment in navigational systems over heavy compute style applications.
Accomplishments that we're proud of
Effective filtering algorithm to create superior location accuracy especially in weak spots/dead spots where cellphones struggle.
What we learned
Isolate component testing, builds, and production layers for increased interoperability.
What's next for Blindside
Create framework for connecting additional sensors to mesh in order to create adaptive layered warning system.
Built With
- computervision
- esp32
- gps
- imu
- raspberrypi

Log in or sign up for Devpost to join the conversation.