-
-
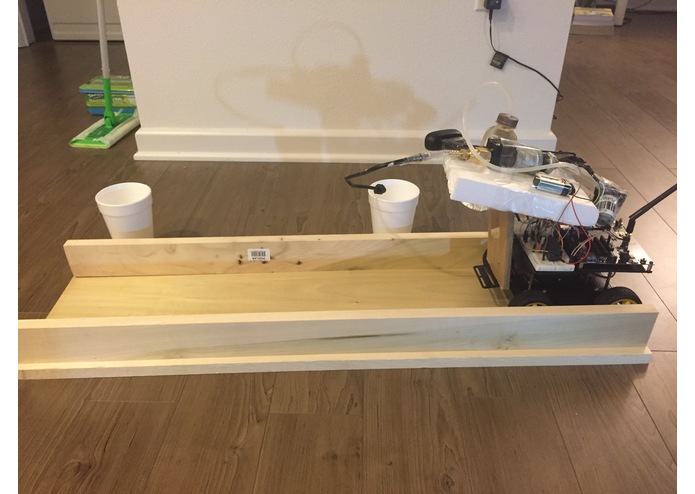
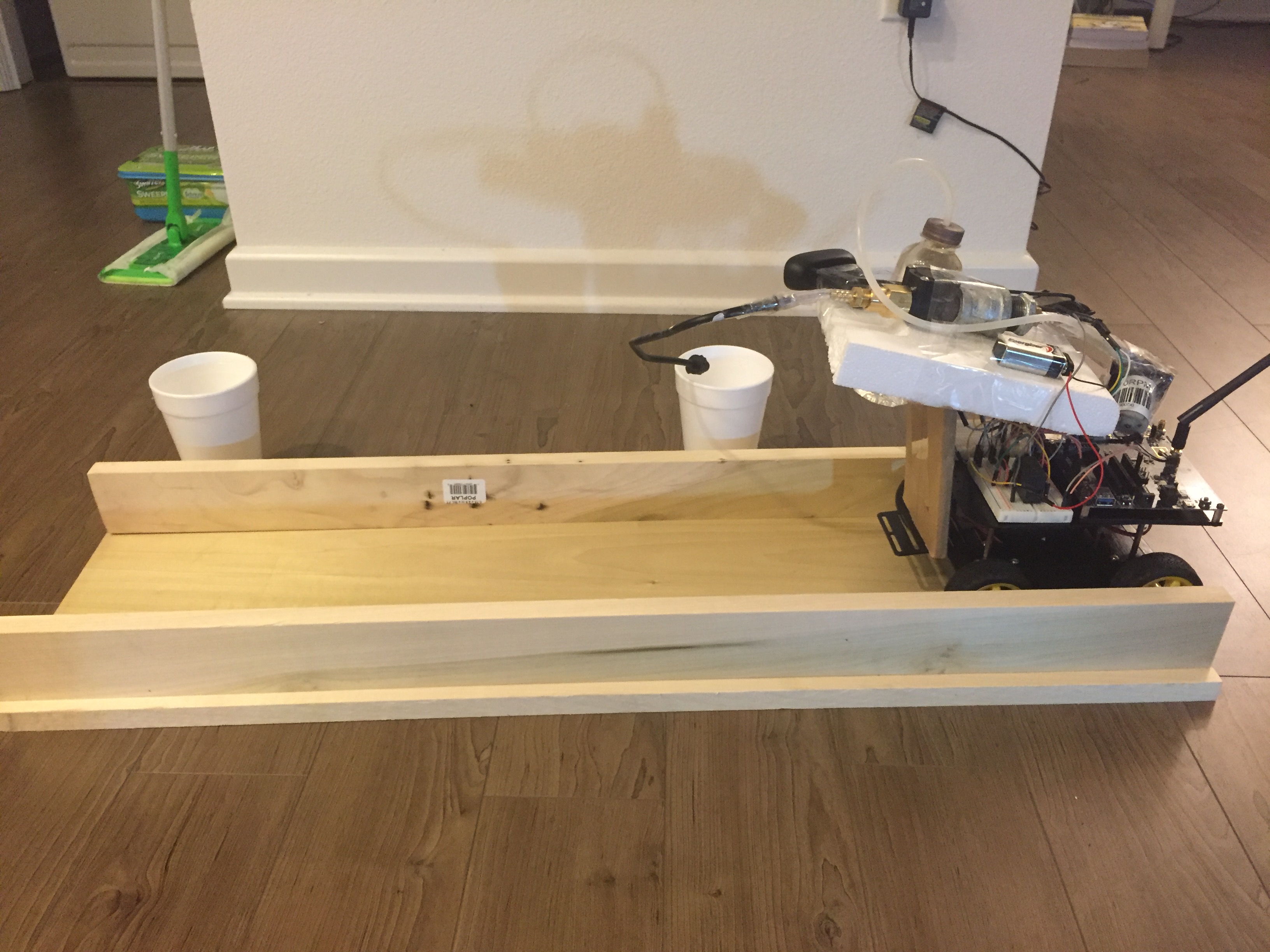
amic assembly iteration 1
-

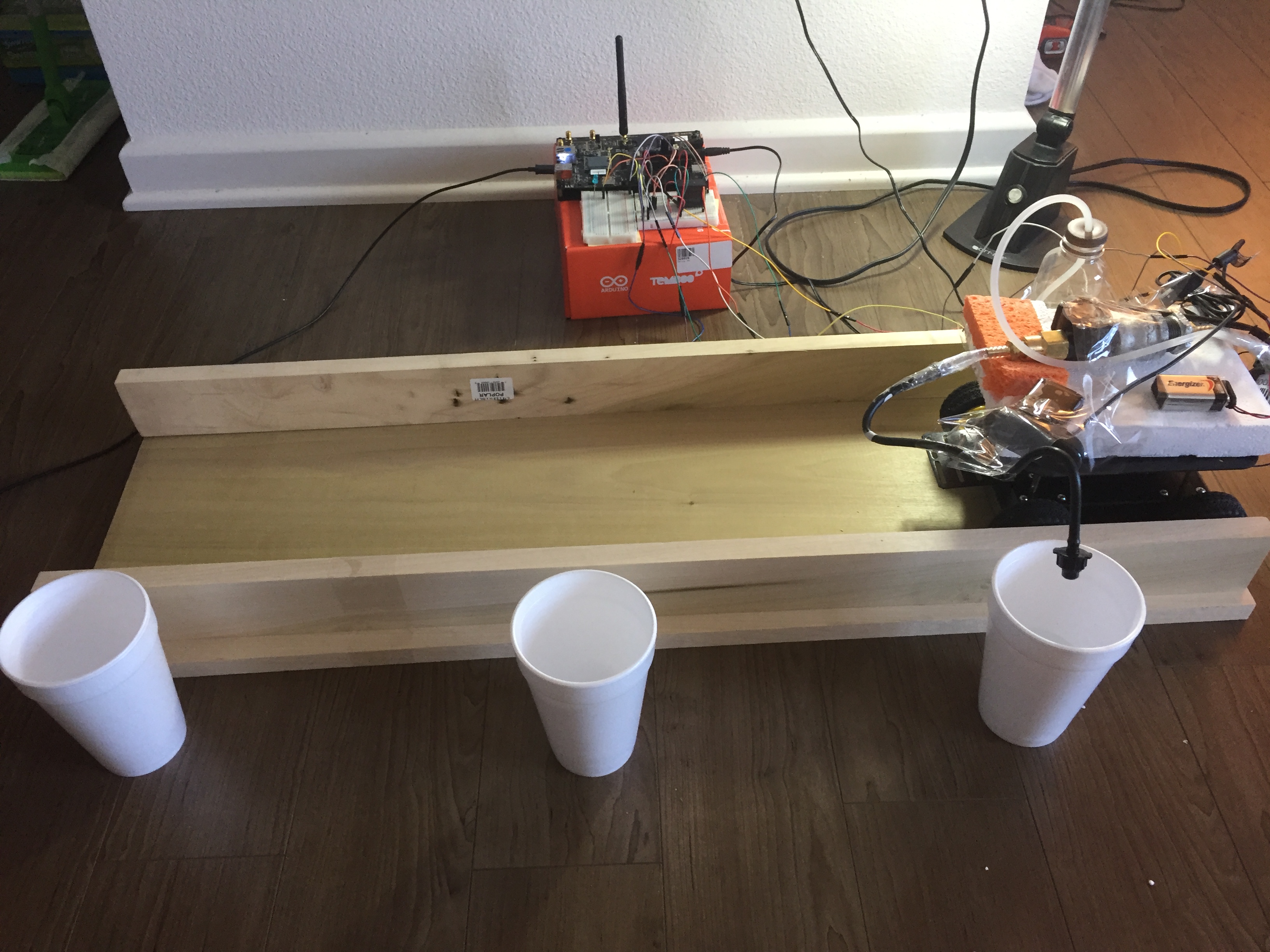
amic assembly iteration 2
Inspiration
70% of water in California is used by the agriculture industry. Instead of seeking to "ding" the consumers even more, we looked for ways to conserve water in the area where it really mattered. We looked into some of the already existing technology that helps to conserve water in agriculture where one of them was the drip irrigation system. Instead of reinventing the wheel, we sought ways to improve the currently existing system. It is widely known that the drip irrigation system is an alternative to flood irrigation system that saves water. This system focuses on watering the plant directly at the plant’s roots so that water consumption by each seed is more controlled. Some of the advantages to implementing the drip irrigation system are:
- More efficient water use (reduces soil evaporation and surface runoff)
- Less water quality hazards
- Greater water application uniformity
- Automation of watering process
Despite all the improvements that the drip irrigation system brings, the system still has shortcomings or disadvantages that make farmers hesitate before switching to the drip irrigation system. Some of the major disadvantages are:
- Lack of a monitoring system to observe the application
- Difficulty in relocating driplines when a different seed is planted
- High purchase cost
- High maintenance cost
- Consistent oversight required
- Abandonment issues (concerns about plastic wastes if technology is abandoned)
In trying to solve the disadvantages of the drip irrigation system, we wanted to develop a friendly robot companion that can irrigate crops, hence the name "amic," as the word amic means friend in the Catalan language.
Source: "Advantages and Disadvantages of Subsurface Drip Irrigation" by Dr. Freddie R. Lamm et al. Kansas State University.
What it does
The amic seeks to solve all of these shortcomings. The amic is a robot that basically makes the drip irrigation systems mobile and can be controlled at any remote location with access to the internet.
An owner of an amic can simply go to the web-based controller (in our case www.amics.herokuapp.com/controls which is the web-based controls for the prototype) and type in the three input fields which are “Seed Type,” “Section Distance,” and “Total Distance.” Seed Type is entered as “almond” or “acorn” etc., where inputting the seed type determines the amount of water to be poured (mL). Section Distance (mm) determines how far the robot should travel before pouring water into the next seed (water comes from a reservoir in which for our prototype it is a plastic bottle filled with water that is attached to the amic). Total Distance (mm) determines the total distance to be traveled before the amic moves back to its original position. In addition, the web-based robot controller has a webcam to observe remotely what is happening in the field. However, unfortunately, the webcam feature could not be implemented to the prototype due to the lack of a library to make the connection between the webcam and the board.
Powered by the Artik10, when the input fields are all filled out, the Artik10 reads off the values and makes the amic pour water and move forward by the Section Distance until Total Distance is reached. Once Total Distance is reached, Artik10 signals to the amic to move back to its original position to be ready for its next watering session. Finally, the flowmeter measures total consumption of water and uploads the data to the web-based controller page to help oversight of water consumption.
Such mechanisms solves all of the shortcomings mentioned above as the webcam feature solves the monitoring system issue, mobile robot traveling in the given Section Distance solves the complexities of relocation of driplines, high purchase costs and maintenance costs as the amic does not require complex set-up process (just buy the amic, connect to Wifi, place a simple track in the field, and go!), oversight issues as the flowmeter clearly indicates how much water is being used, and the abandonment issues of plastic wastes lingering as the amic is a one unit reusable robot. Overall, we figured that an efficient and cheap drip irrigation systems could help more farmers to implement such systems, which in the end, can help to conserve more water in California.
How we built it
For our prototype, the main components were:
- Motor-controlled 4WD wheels.
- Arduino Uno + Adafruit Motor Shield to control the wheels.
- 5 AA batteries to control the Motor Shield.
- Artik10 as the main board that receives from web-based controller and controls everything else.
- Web-based Robot Controller webpage to be able to control the robot at the comfort of one's home.
- A flowmeter to upload total water consumption to the web-based controller page.
- Peristaltic pump to pump water from reservoir into the seed.
- An additional 9V battery to power the peristaltic pump.
- Relay switch connected to the Artik10 to drive the peristaltic pump in separate sessions.
- Blue LED light to indicate that water is being pumped into the seed.
- Water bottle for reservoir.
- Silicon tubing.
- Pipe connectors.
- Logitech webcam to observe the planting process remotely.
- Wood track to help the amic go in a straight direction forward and backward.
- Styrofoam cups to indicate Section Distance between seeds.
- Arduino IDE to upload code.
Challenges we ran into
Flowmeter not uploading to webpage properly. For some odd reason, the water consumption data uploads as zero. We suspect that this is a power issue as the GPIO pin output is significantly weaker than that of the Arduino Uno board. Due to lack of time, we couldn't fix this in the prototype.
Motor not going forward and backward with full power. We suspect power "brownouts" as we hear loud electrical noise coming out from the DC motor. The motor behaves a bit erratic. This issue is also not completely fixed due to time issues. But the motor successfully reads the input from the Artik10 and the web-based controller as we've seen this work initially. After the peristaltic pump has been on/off for a longer period of time, we started to notice inconsistencies in the motor movement. We also suspect possible EMI radiating off of the peristaltic pump motor because it is constantly turning on and off in a short period of time that might interfere with the motor shield. When the prototype worked normally in the beginning, the pump was far away from the motor shield. However, this issue can be easily fixed with some more time as it is purely hardware. UPDATE: This issue was fixed by soldering some capacitors to the wheel motors and controlling the motors with relay switches.
Powering up the 5V relay switch for the peristaltic pump with a separate 9V power source using the Artik10 GPIO pins. This issue was solved with some diodes and transistors.
Assembly. There were too many components to fit on the 4WD platform that we had. One of the major problem was putting the peristaltic pump very close to the motor shield because of EMI. This is something that couldn't be resolved because of time limitations and 4WD platform space limitations.
Webcam feature could not be implemented due to lack of library that can downloaded into the Artik10. We hope to solve this issue once the Artik10 becomes more popular and the required packages are created.
Artik 10 GPIO output is sometimes very inconsistent. Sometimes the pin doesn't turn off when it should. Things like this might be a source of problem for the motor shield.
Artik 10 being at its development stage made a lot of things very hard to operate as there were only a few documents we can work off of. The forum was there, but because the board was so new, there was not a lot of people with answers, if none at all. I think once the community is established, this board can be one of the most powerful IoT boards out in the market.
Accomplishments that we're proud of
Overall, we are proud that we were able to finish building the prototype and submit. My colleague and I divided the work into the webpage controller side (server side) and the Artik10 side where my colleague was responsible for the webpage side and I was responsible for programming the Artik10 and the rest of the hardware. Despite other demanding full time engineering work from our work, we were able to finish strongly by being able to produce a working prototype. Some minor problems as mentioned in above section, but overall, we are extremely proud of ourselves in meeting the ends, when in the beginning of this project, we were both very unfamiliar with IoT devices. We learned to program in many different languages such as C and Python, and allowed the robot to communicate with an environment based in the cloud. In other words, we both had to start from scratch in producing this prototype, and we are proud to say that we met a good 98% of our goals!
What we learned
This project has been very fulfilling. It sprout passion that we didn't even know existed in us. More than the business aspect or the technical aspects, we learned an important self-fulfilling human aspect of things, kind of like feeling epiphanies. We learned that we can accomplish great things as long as we can be dedicated to it through the will to help. We learned that without the will to help others, passion and dedication cannot come into existence, which we learned that these are two key characteristics in making great accomplishments happen. Working on this project incited a feeling that we wanted to truly help the California's drought crisis as it was very personal. Both my colleague and I were raised in this state, and we always agreed that California is one of the best places to live in the world. We felt that not only do we want us to feel that it is such a great place but everybody else, from residents to visitors as well as from senior citizens to future generations. We could not tolerate the fact that California can be in ruins one day due to drought, so we felt a strong desire to help. We felt that the MAD challenge was a great place to begin helping and influencing the outcomes of the state of California.
What's next for amic: Mobile Drip Irrigation Systems
The immediate next action is to fix the motor issues and all the hardware related issues that we faced that prevented us from making a 100% completed prototype. We also might want to switch over to solar power as the amic will be out in the sunny fields of California for the most part. The long-term next action would be to contact the agriculture industry to present our invention and seeing if there is any possibility of our technology being implemented as an aid to the industry.








Log in or sign up for Devpost to join the conversation.