-
-
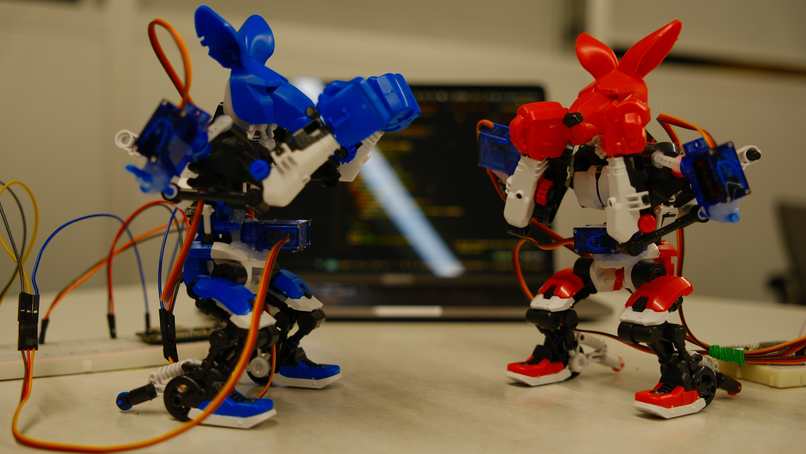
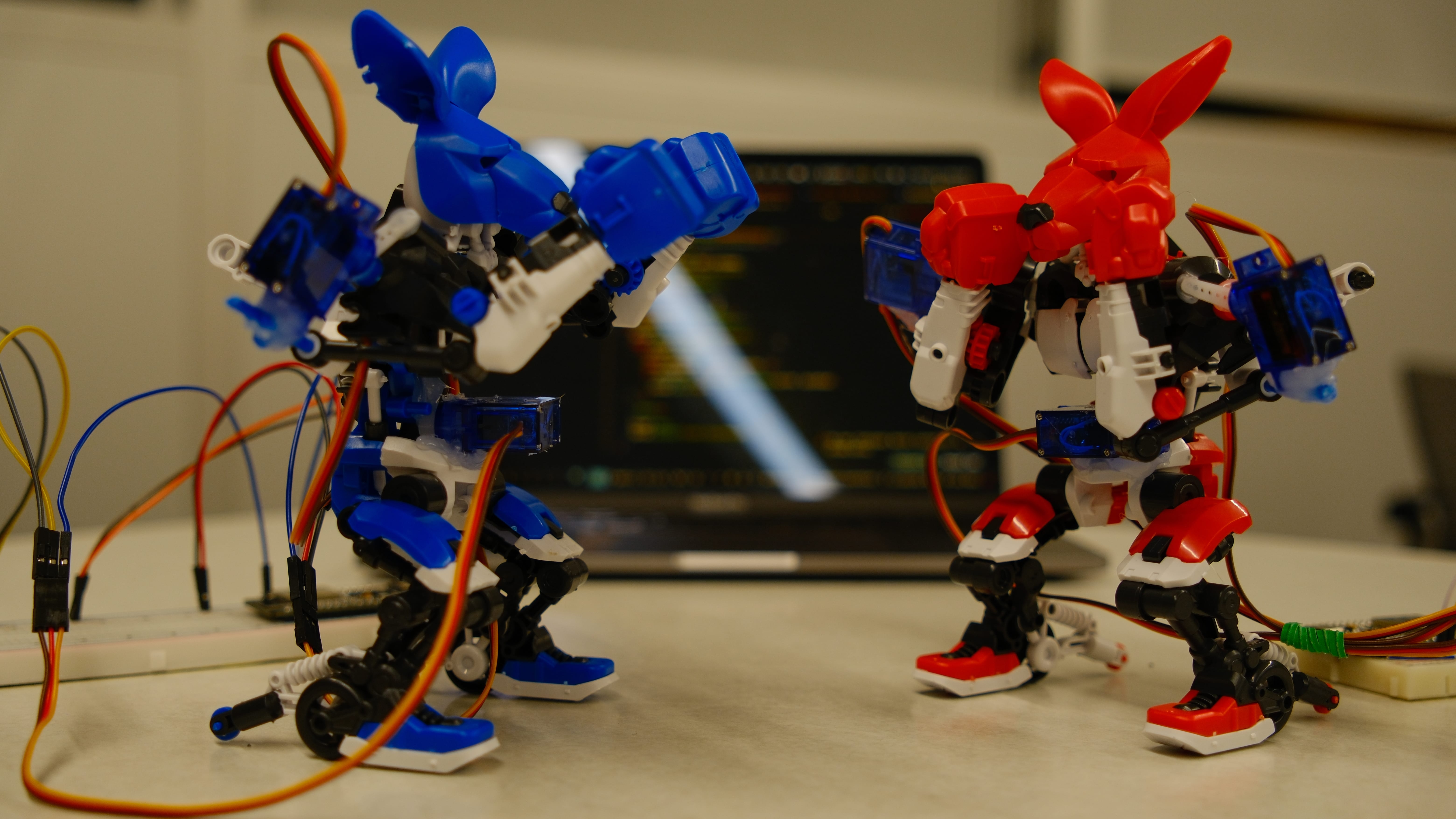
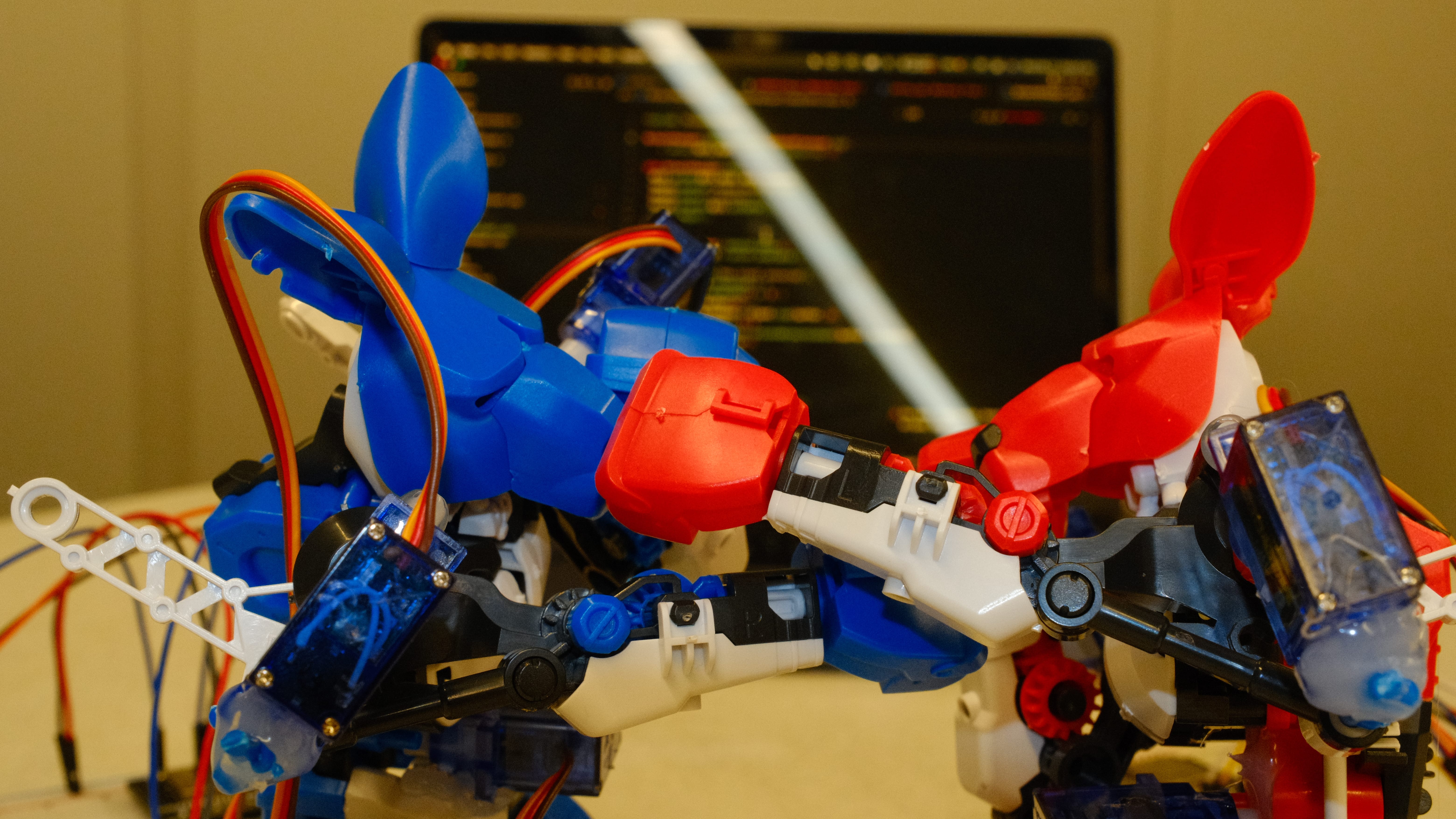
Two Robots Fighting Full View
-
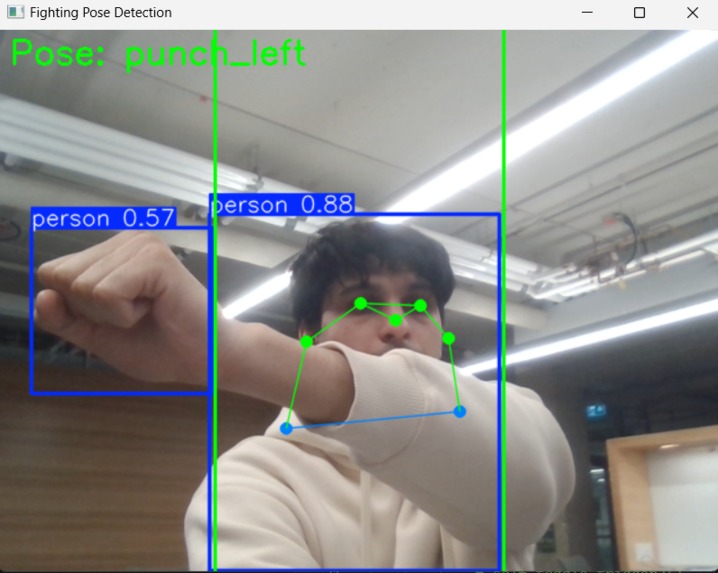
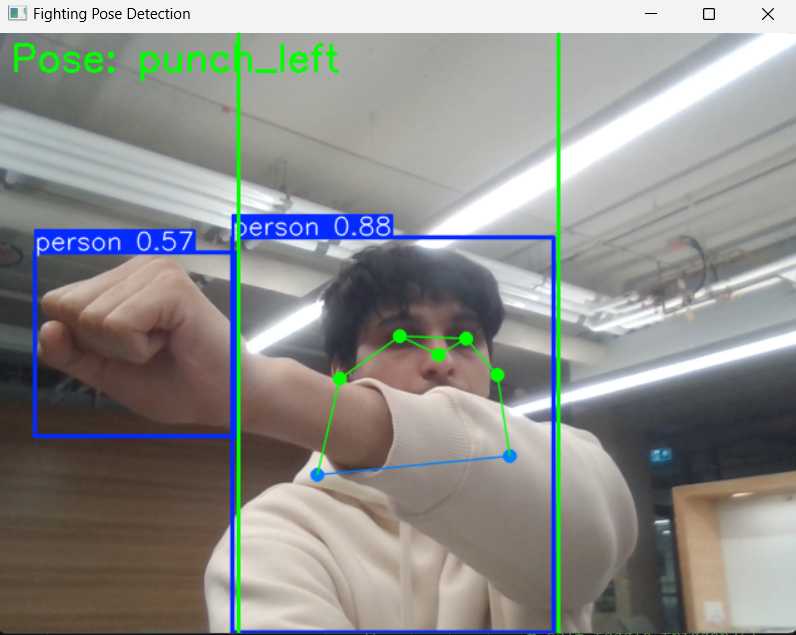
Pose Detection Demo with YOLOv11
-
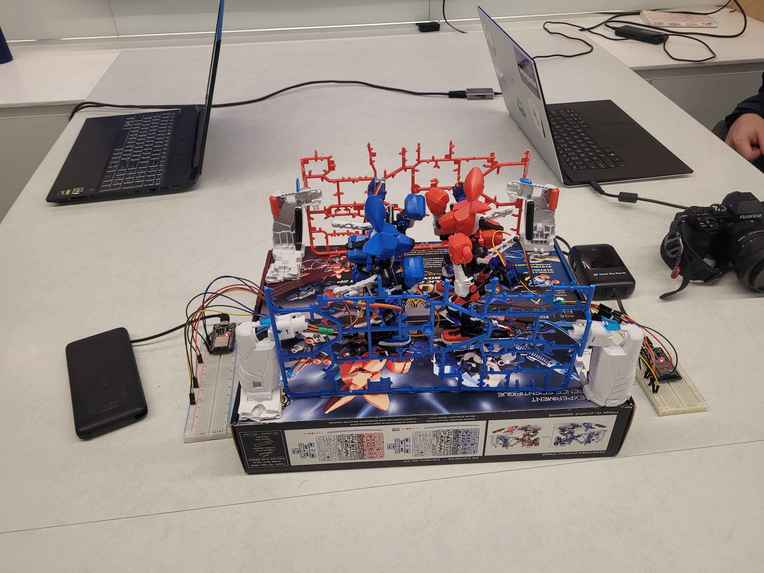
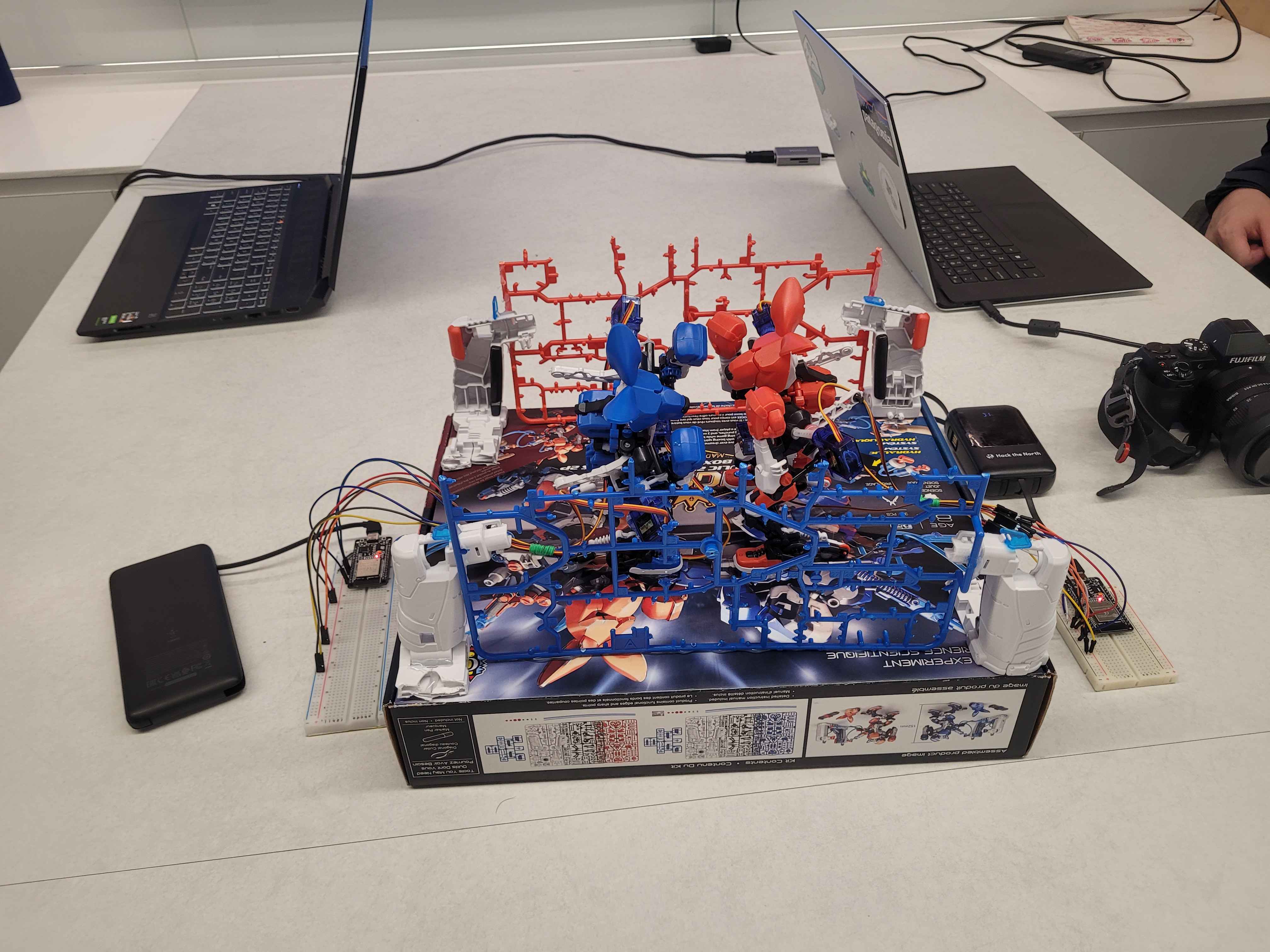
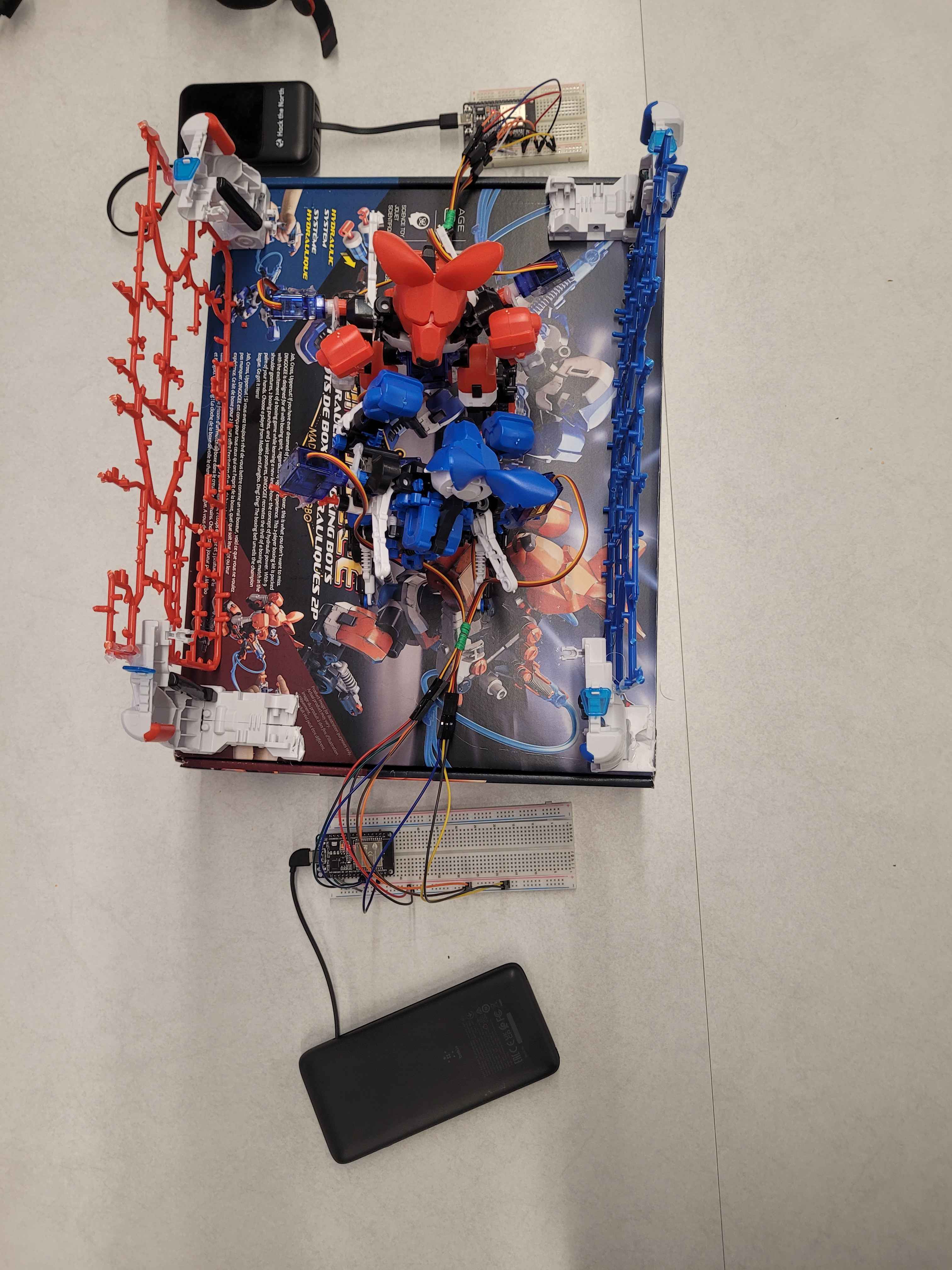
Side View of Final Arena and Microcontrollers
-

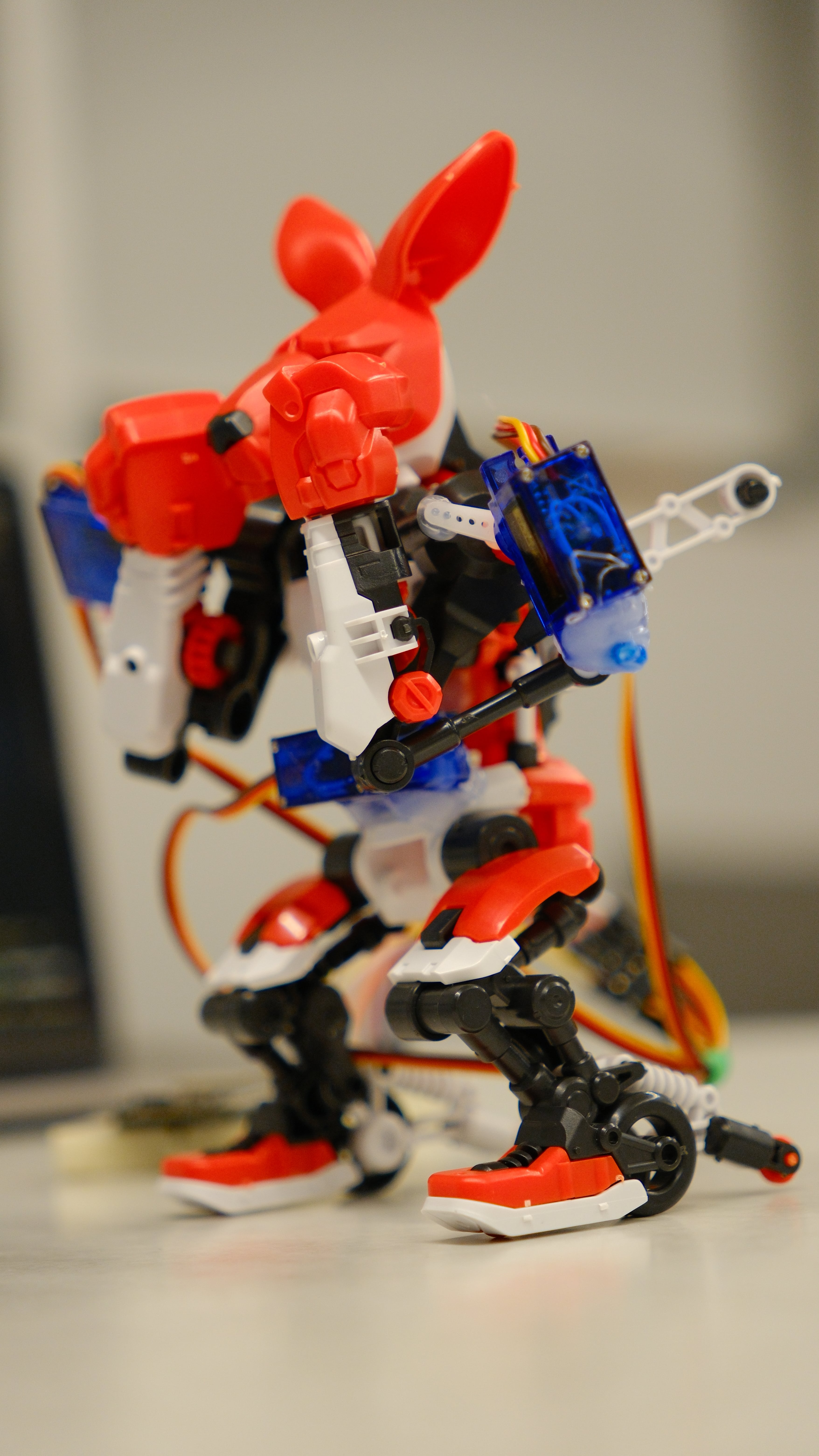
Single Robot Full View
-
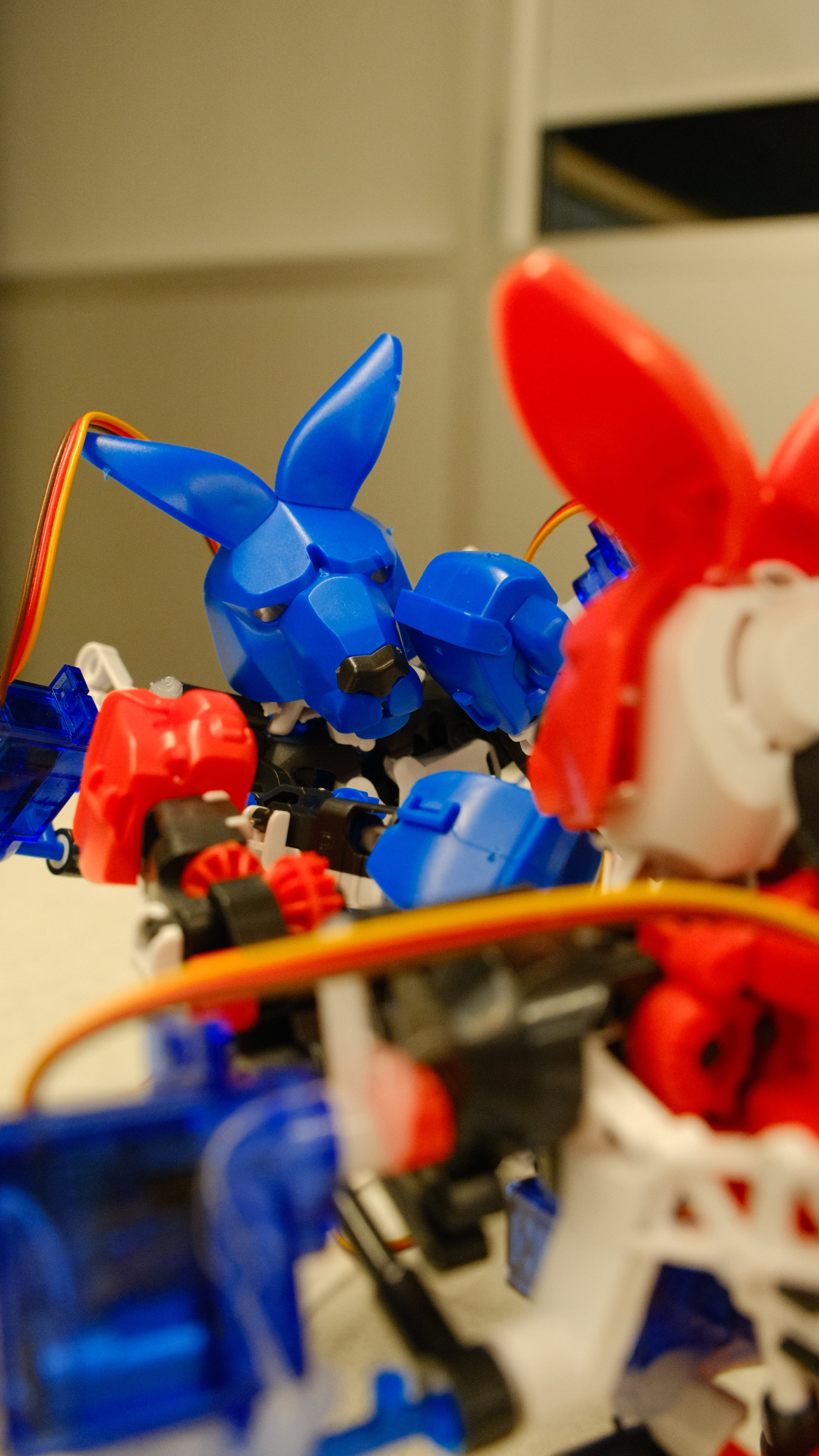
Over the Shoulder Fighting Shot
-

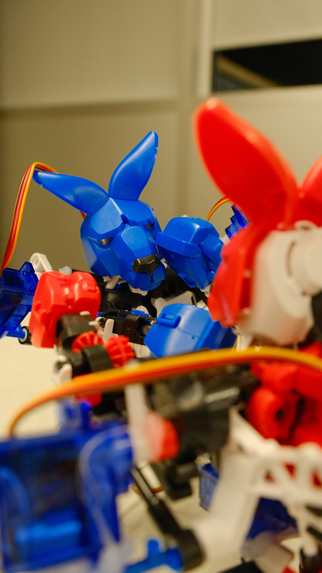
Fighting Shot Close Up
-
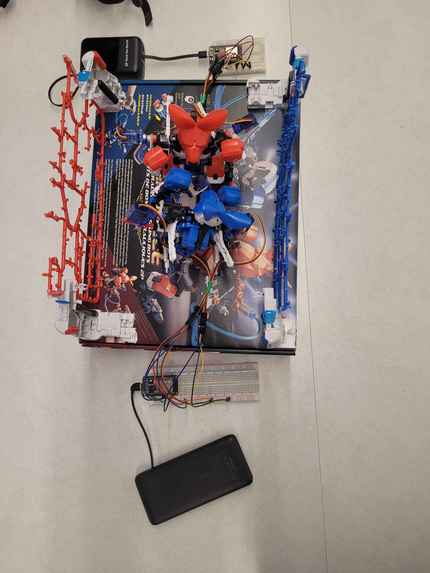
Top View of Final Arena
Inspiration
We Love Robots! We wanted to build a project that we could consider a truly fun endeavour while delving into the most exciting avenues of robotics, where leading companies are pushing the boundaries of humanoid and companion robots. These innovators are developing robots capable of performing a wide range of tasks while enhancing human-robot interaction through advanced AI, neural networks, and deep learning. The growing focus on creating robots that can seamlessly integrate into daily life inspired us to develop a more accessible and affordable option. Our goal is to provide individuals with the opportunity to explore the potential of humanoid robots without the barriers of high cost or complexity. By offering an approachable yet fun entry point with robo-fighters, we aim to help bring the future of robotics to everyone.
Check out our demos:
What it does
Using the latest pose detection models, our tabletop robots connect to your laptop's camera feed and translate your movements from human player to robot fighter instantly.
How we built it
We repurposed existing toys similar to Rock'em Sock'em models by reassembling them and attaching custom servo motors controlled by ESP32 microcontrollers to enable movement. We combined the power of YOLOv11's pose detection with the microcontrollers to control the fighting robots. The client-side Python code analyzes your moves through OpenCV, while custom C++ firmware controls the servo motors that bring the robots to life. A PyQt user interface lets you easily connect your laptop to your mechanical fighter, making setup a breeze.
Challenges we ran into
- Perhaps our biggest challenge was the hardware itself. Building a responsive fighting robot meant making tough decisions about motor placement and assembly. We went through multiple iterations to find the sweet spot between mobility and stability, ensuring our robots could throw a mean punch while staying upright!
- Optimizing pose detection for real-time response - because no one wants their robot throwing a punch five seconds late to the party.
- Building a rock-solid WiFi communication system between laptops and robots - dropped connections mid-fight? Not on our watch!
- Configuring the backend development environment for running OpenCV and the YOLO V11 Pose Estimation model on different operating systems
Accomplishments that we're proud of
We implemented a fully responsive robot fighting system architecture that actually works in real time! The smooth translation from human movement to robot action using computer vision feels incredibly satisfying. Plus, we managed to keep the cost and complexity low enough that anyone can join in on the robot-fighting fun.
What we learned
This project taught us the ins and outs of real-time computer vision, the delicate art of servo motor control, mechanical constraints, microcontroller programming, and the challenges of wireless communication in robotics. We also learned that making robotics accessible doesn't mean sacrificing sophistication - sometimes the most elegant solution is also the most fun!
What's next for YOLO Brawlers
We're gearing up to add more fighting moves and unlock walking movements, letting our robots dance around the arena! We're also working on packaging our user-friendly app, so you can jump straight into the action without any setup headaches. Plus, we're planning to make our design open-source, encouraging anyone to build and customize their own robotic gladiator. The robot revolution starts on your desktop!












Log in or sign up for Devpost to join the conversation.