-
-

YawYaw
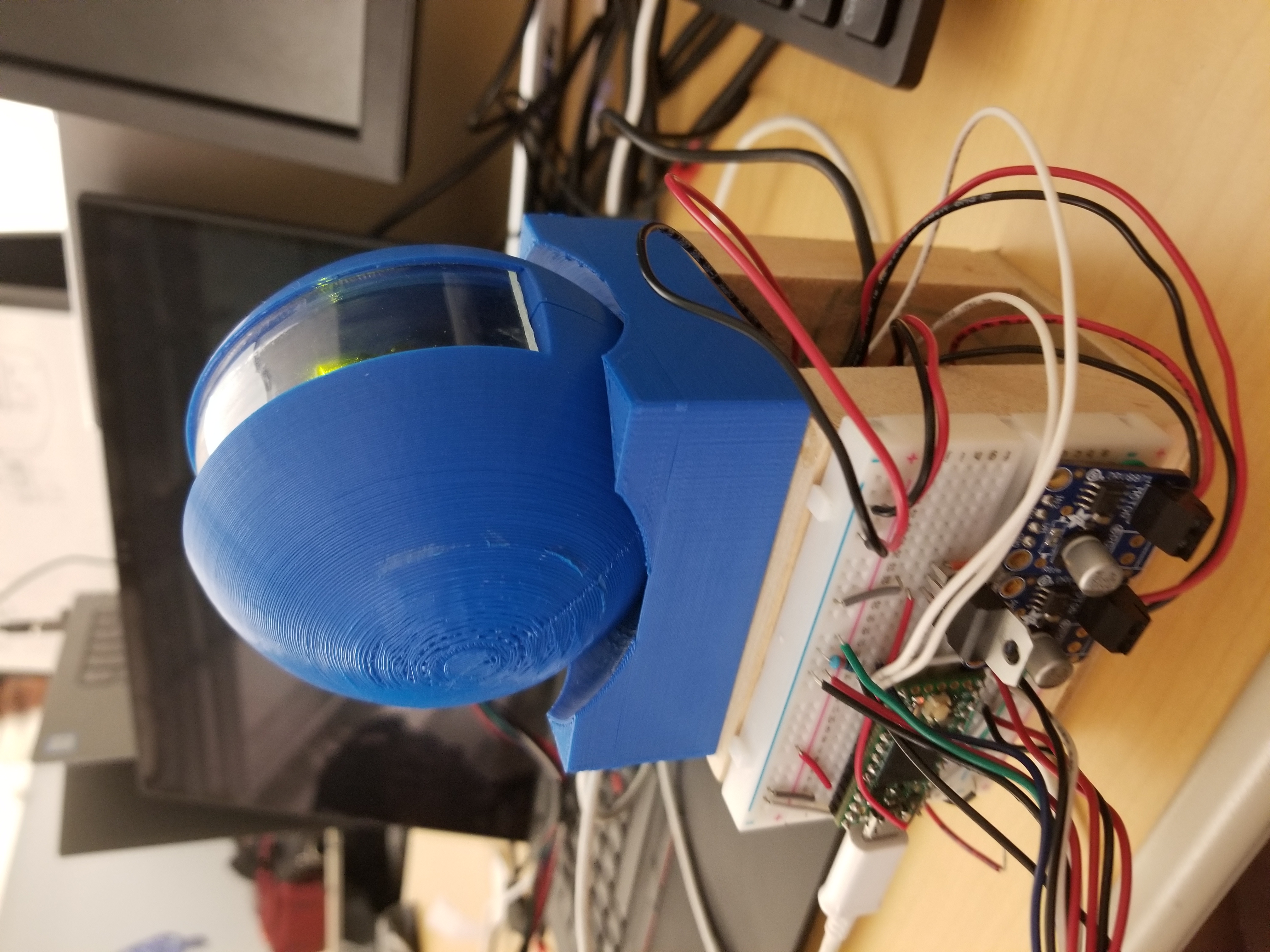
YawYaw is a "Looky-Loo" pan and tilt camera harness designed to be mounted onto a variety of unmanned vehicles, such as UAV's, drones, and UGV's. With its built in motor array, it will provide users with a robust way to virtually interact with the surrounding environment. The easy user interface provides a hands-free solution to pan/tilt by utilizing a sensor array to track the movements of the user's head.
Inspiration- We were inspired to solve this problem because we found value in the impact of its application and the problem best suited our team's skillsets.
What we learned- The most important thing we learned was how to maneuver around the many challenges we faced in the design, development, and prototyping process.
How we built it- YawYaw uses a Teensy 4.0 microprocessor to communicate with the LSM9DS1 IMU over SPI. With this data, it calculates the required power for the motors to correct their position using PID Controllers.
Challenges- Some of the challenges we faced were scaling down our ideas to fit within our reach in terms of access and feasibility, design errors, and bugs.
Built With
- c++
- camera
- eagle
- imu
- machine-learning
- motors
- pid
- python
- solidworks
- teensy

Log in or sign up for Devpost to join the conversation.