-
-
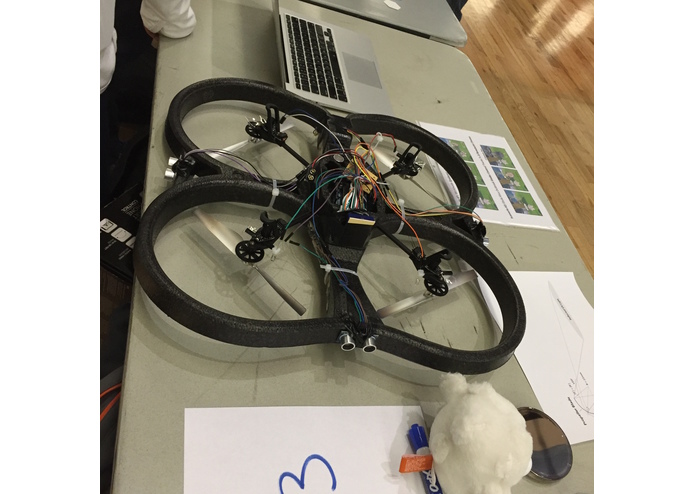
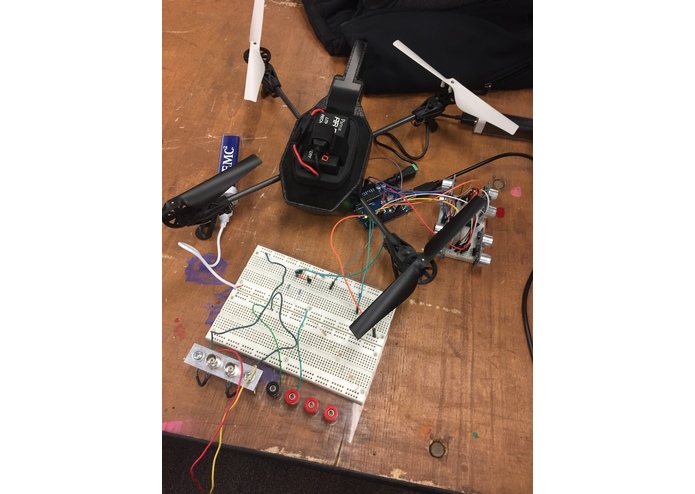
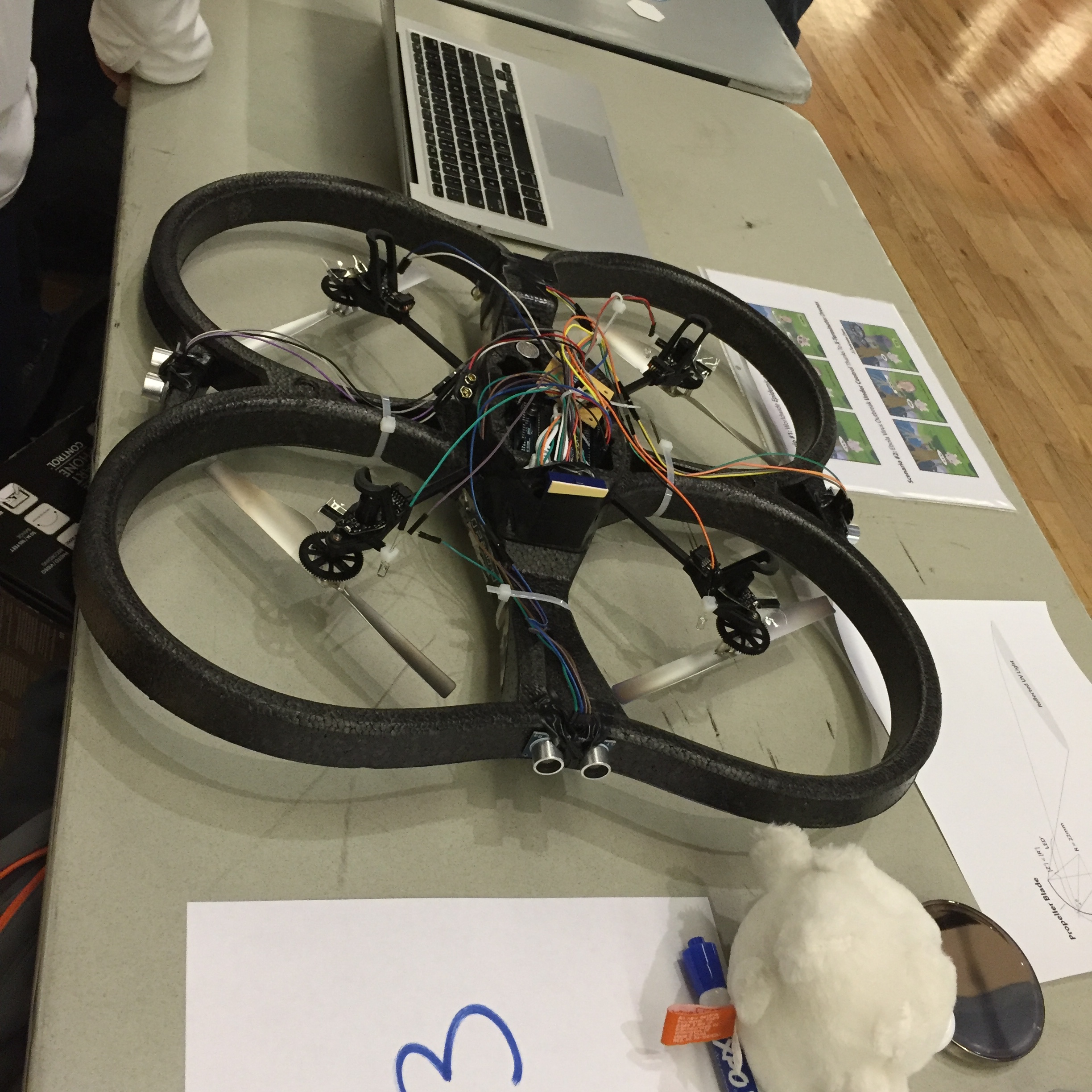
The hacked drone with most of the components for demo
-
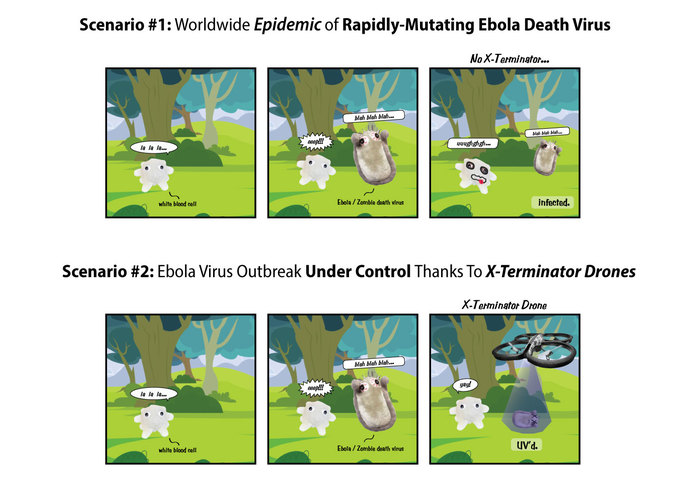
Cartoon of our hack
-
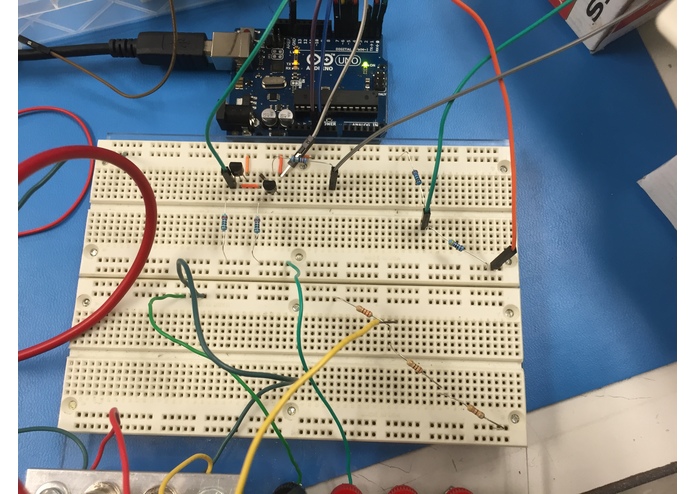
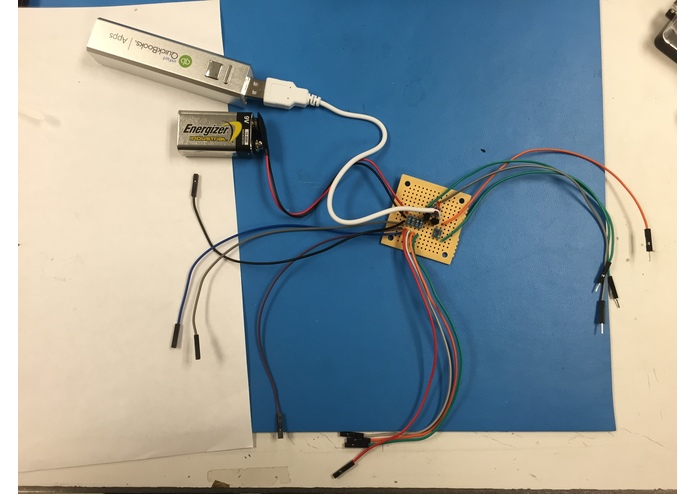
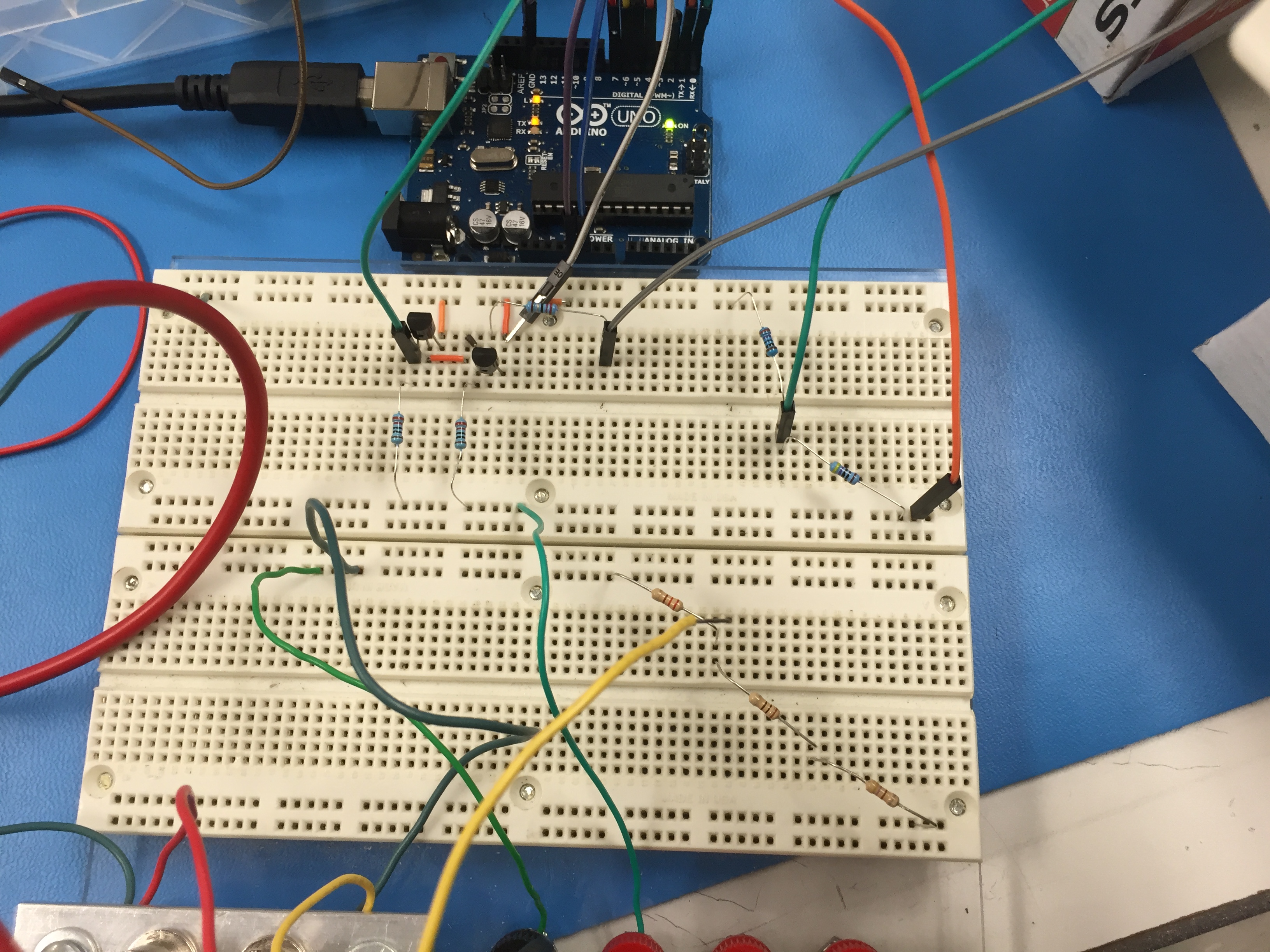
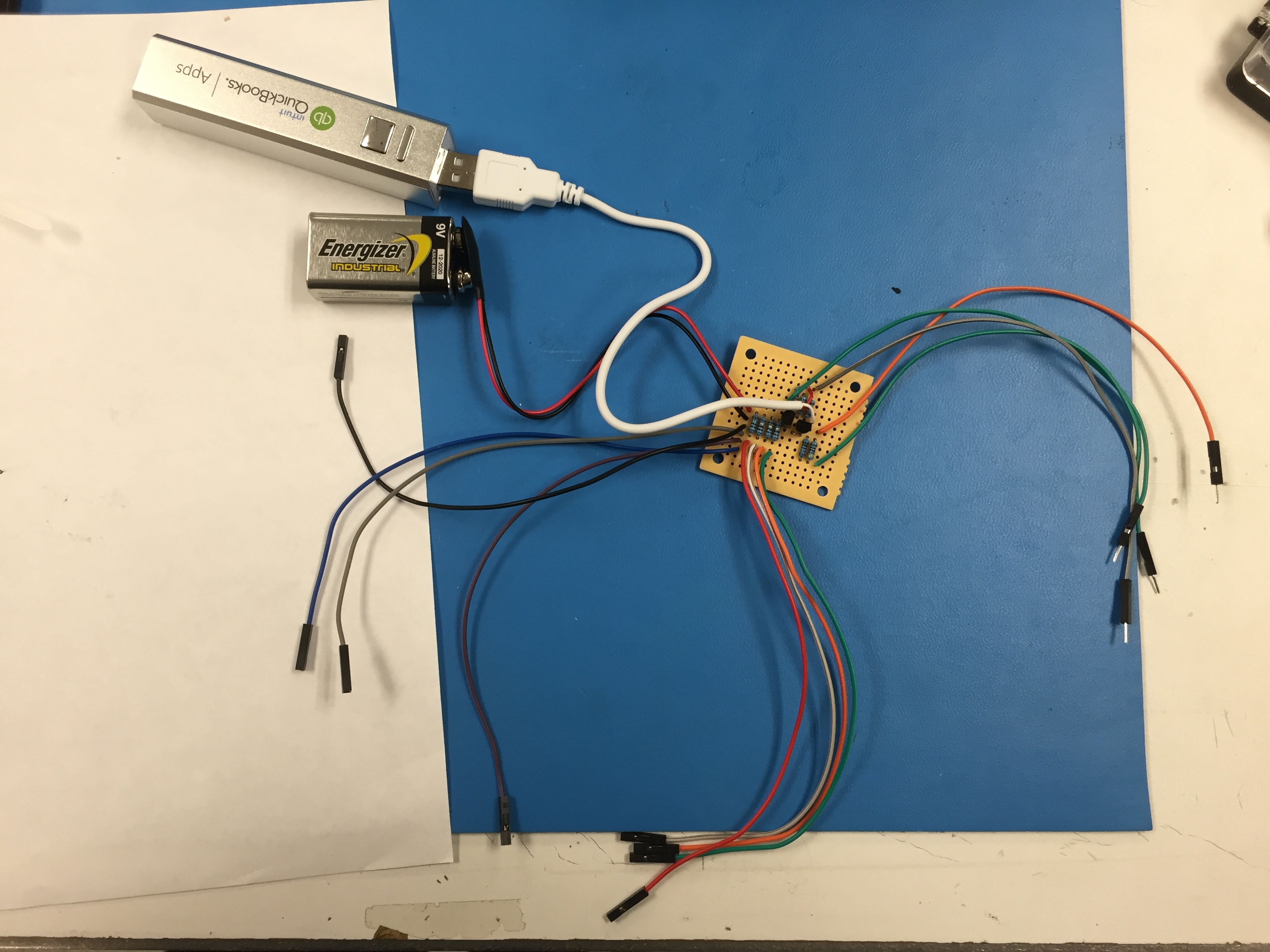
Voltage divider
-
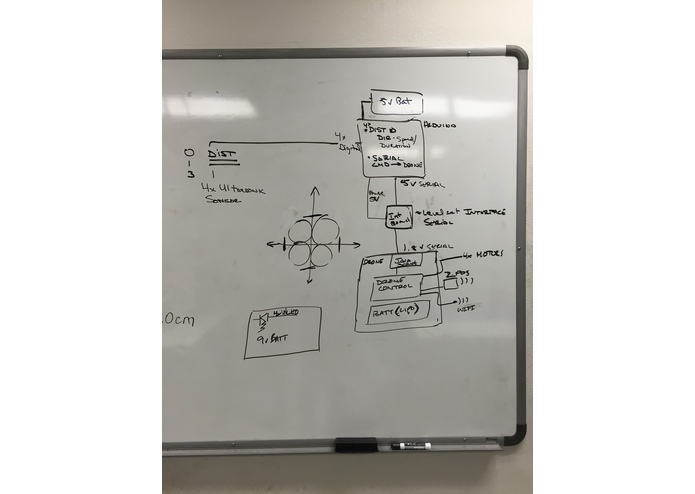
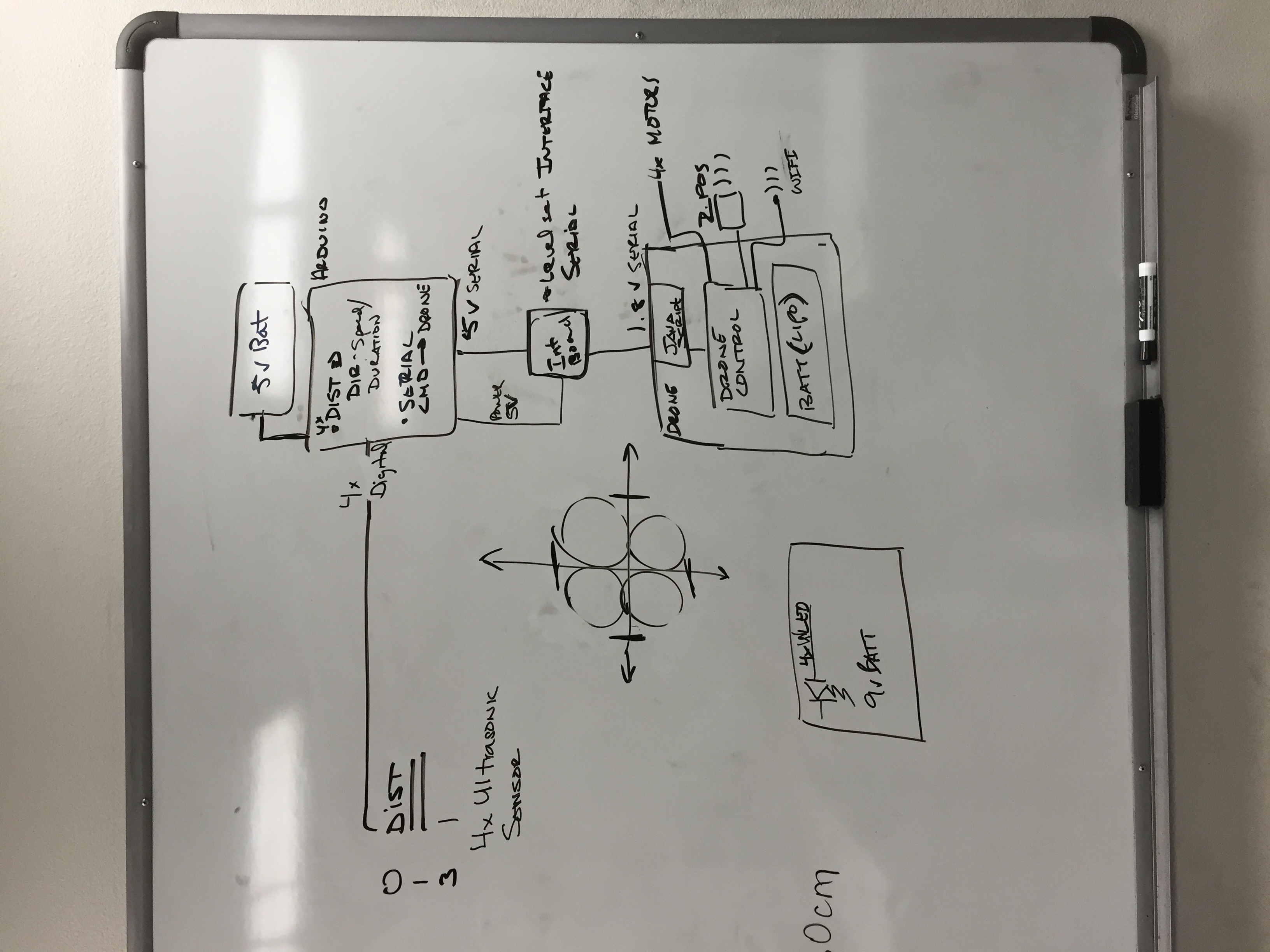
Overall diagram of how our hack comes together
-

Sputter-coated propeller blades with aluminum
-

Success in demonstrating UV light reflects off of our aluminum coated propellers
-

Placement of LED lights
-
The prototype components prior to our more refined product
-
Refined voltage divider and circuit for onboard components
-
Final results! :)



Please visit our website for more information!!
Inspiration
Spurred by wanting to find a hack that bridged each of our specialties (optical sciences, biomedical engineering, and computer science) in addition to the recent Ebola outbreak and epidemics in general, the X-Terminator Drone was born. This hack aims to reduce the risk of healthcare workers and volunteers in the face of an epidemic by using drones to UV sterilize the field.
What it does
The X-Terminator Drone uses UV light that is reflected off of sputter-coated aluminum propeller blades to inactivate viruses (by irreversibly damaging its genetic material), making them no longer deadly and unable to replicate. The ultimate application of this hack is for healthcare facilities and patient clinics to be sterilized of harmful pathogenic diseases without need for human contact with deadly viruses and pathogens. High-risk areas can be first sanitized by a drone prior to human contact.
How we built it
To automate the Parrot AR Drone 2.0 Elite, an Arduino Uno connected to multiple ultrasonic distance sensors was connected to the drone. Each propeller blade was sputter-coated with aluminum metal (~50nm thick) to reflect UV light. A UV light source was mounted under each propeller blade at an ideal distance from the blade to best reflect the UV light below the drone (the physics is explained on our website). Finally, the drone itself was programmed to autonomously roam a room via feedback from its distance sensors mounted in each direction, at an altitude permitting UV inactivation of viruses and pathogens.
Challenges we ran into
This was a very technical hack that involved many endless hours of troubleshooting, especially since none of us had done many of the technical hardware and software hacks involved. We were new to the Arduino and drones, as well as how to build the circuits we needed. This hack first involved identifying multiple UV light sources, of which we went through a couple LED light options before our final solution. Along the way, we encountered faulty hardware, and our procedure of soldering and connecting our initial ideal higher-powered UV LED lights resulted in their electrical failure. We then had to improvise and go with another set of different LED lights that were in the UV spectrum. Next, there is little documentation of hacking a Parrot Drone with an Arduino that combines all of the endpoints we included in our hack.
Beginning with wiring the circuitry on breadboards to connect multiple distance sensors to the Arduino, we encountered issues with the readout and responses that we had to troubleshoot. Part of the issues were related to the voltage, and we eventually figured this out. Next, there were differences in Drone pinouts than what was posted online, we had to identify through voltage drops and differences the functions of the pinouts, and then connect the drone to the Arduino. For many hours, we were only able to connect successfully the computer to the Arduino and receive proper printouts from the sensors, and not from the Arduino to the drone. To solve this issue, we had to seek some advice on matching the voltages between our various types of hardware in order for all of our code, hardware and sensors to communicate. Based off of the advice and feedback we received, and online forums, we put together a level converter to divide voltage that allowed communication between the sensors, drone, and Arduino to finally happen (BUT, not before we faced a malfunctioning Arduino, and after using a fresh one we figured out that this had been the problem for a couple hours).
Next, we had to weigh all the components and shave off any excess weight-- considering a second voltage divider to draw less energy. After that, we had to figure out the actual hardware and mechanical mounting of the LED lights. The next challenge was consolidating all of our multiple circuits into one small and lightweight board. Then finally, we wanted to command the flight of the drone to be similar to an iRoomba vacuum. We wrote javascript to automate the this type of room sweep via drone flight movements. This was one of the toughest hacks, as it was not clear in any instructional references we could find how to actually control the drone via the Arduino while using the sensors. We spent at least a full 16 hours on trying to get the communications between the devices working. Finally, we succeeded in reflecting UV light off our of drone propellers at the end, which allowed us to consider our hack a proof-of-concept for use during an epidemic.
Accomplishments that we are proud of
The amazing collaborative teamwork and the fact my team worked together non-stop to make this happen! What an incredible effort, especially given that none of us have done much of the things we had to figure out for this hackathon. We each learned how to integrate and utilize new hardware, software components and languages, and had to draw from past science classes as far back as high school for the scientific concepts.
What we learned
Many many things, already alluded to in the challenges section... mostly along the lines of working with new hardware, circuits, writing Arduino code, working with Arduino libraries, interfacing multiple technologies, hacking a drone, new/unfamiliar coding languages, etc.
What's next for X-Terminator Drone
Trying to find the support to turn this drone into a reality where it can be utilized out in the field. What would be ideal is to use holograms on the propeller blades, instead of aluminum, and to use a high-powered UV laser. The future drone will also come with a companion rover that is a land-based robot that can manipulate obstacles and objects in the environment to deal with unfamiliar terrain and situations.
Important video links that should be viewed to show we've done technically! Since we were not allowed to demo our hack the way it was meant to be used indoors:
1) Ultrasonic distance sensors working: https://youtu.be/2WZT5U6yAT4 2) Sputter coated aluminum propellers: https://youtu.be/uWcDtlGyKJg











Log in or sign up for Devpost to join the conversation.