-
-
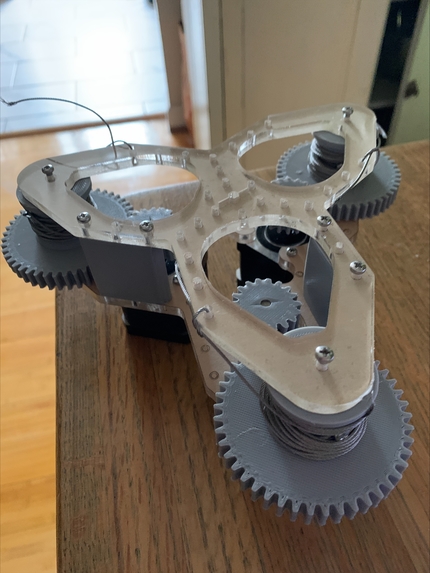
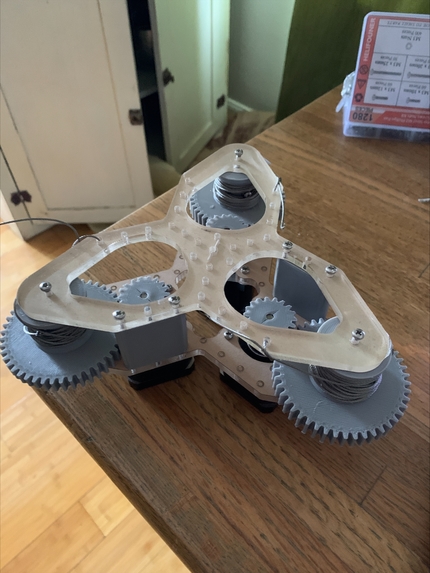
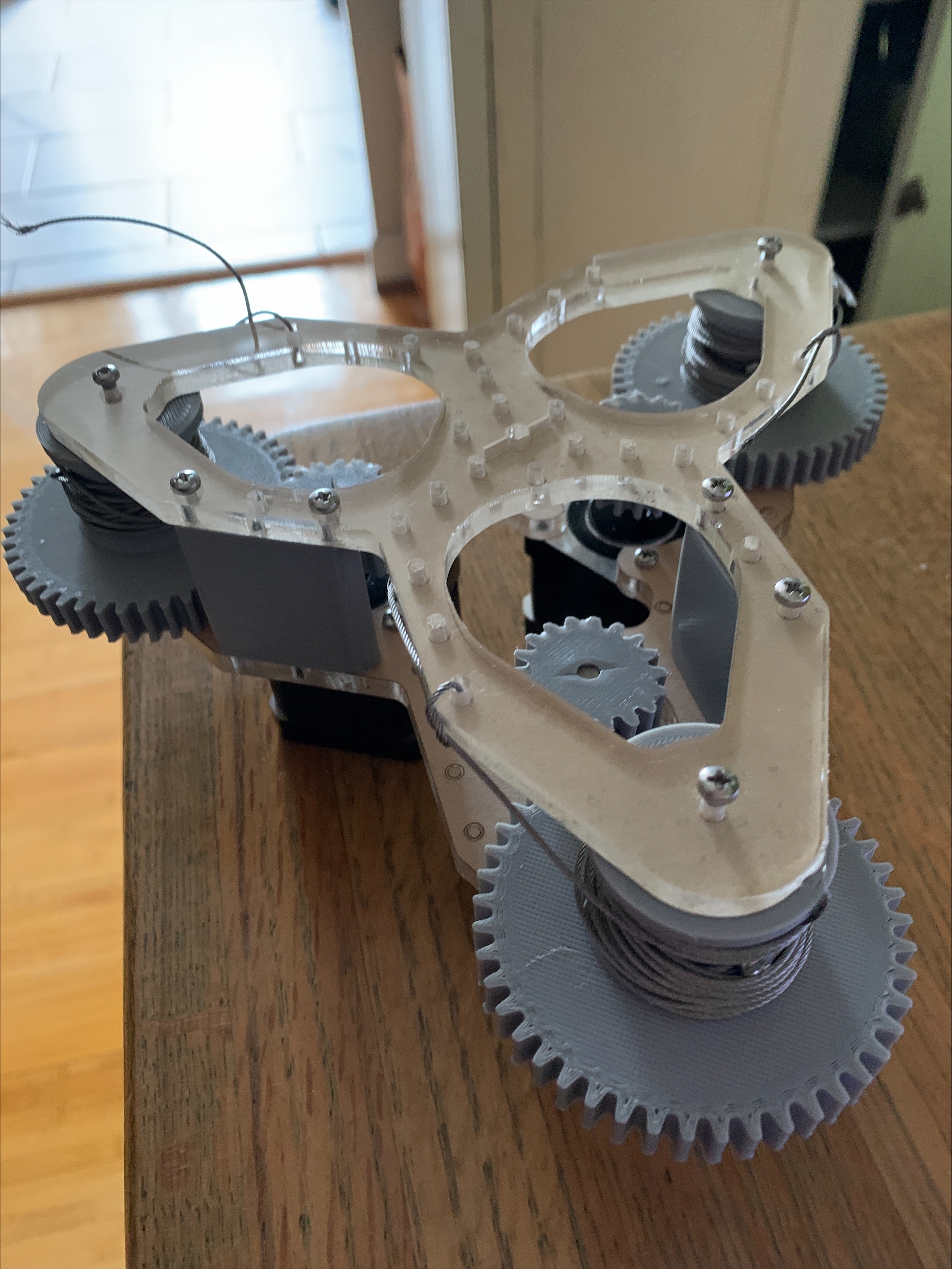
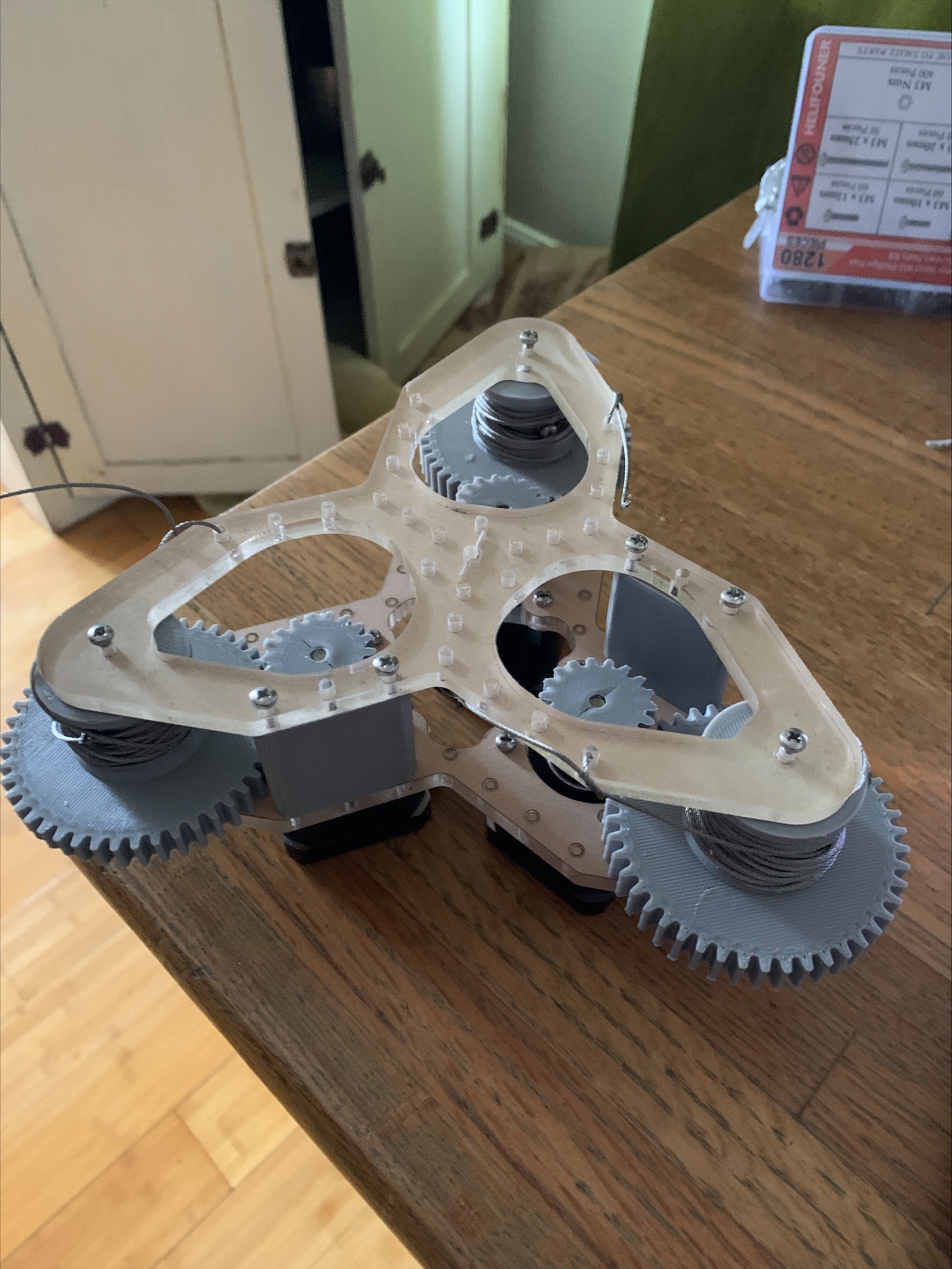
The physical wirebot! the cables are attatched
-
Inspiration
I presented at Makerfaire where someone told me that my tool would be very appllicable to wirebots. I had made something to extend and ease kinematics solving, and the wirebot kinematics are very hard to do, as they have no analytical solution. Since then I have wanted to make myself a wirebot, and I'm not sure why they aren't as common. I aim to fix that.
What it does
The wirebot moves around by pulling on cables. The platform I have made is meant to run on a microcontroller and has it's own developed library, so developers can build their own products or tools on top of the wirebot and treat it as a black box.
This would especially hep for routine maintenance tasks, where sensors need to be used throughout a building -- they can be moved around on a wirebot!
This could also be used for additive manufacturing
How we built it
I had to build my own optimization library for kinematics solving, and change the code usually used for Basic Linear Algebra to incorporate vector valued functions, then create the control.
Challenges we ran into
Since it's made for microcontrollers, a lot of standard C++ functions don't work -- so eigen doesn't work either. I had to create dynamic lists, etcetera.
Time constraints meant I couldn't run the code on the robot -- but it works great in simulation.
Building the robot took a lot of time!
Accomplishments that we're proud of
I built my own optimization library, with formally defined constraints. The trajectory following works like a charm -- and really fast too for solving based methods There is a LOT of pointer usage, and things feed into themselves a lot -- but it seems really neat to me, and I'm proud of myself for the way I set up templates for any type of transformation.
What we learned
A lot! Most of it is above, in accomplishments and challenges. Sadly, I learned that sometimes functional can be better than cool and imaginary.
What's next for WireBot platform
The Wirebot needs to be used with a payload, and actually moved around in space! I built it, but never hooked it up. Then, used with torque controlled motors.
Built With
- arduino
- autodesk-fusion-360
- basiclinearalgebra
- c++
- matlab

Log in or sign up for Devpost to join the conversation.