Inspiration
Wildfires can spread extremely quickly, and early detection is critical for reducing damage to forests, communities, and infrastructure. Traditional wildfire monitoring often depends on human observation, fixed sensors, or delayed reporting, which may not be fast or flexible enough in remote areas. We wanted to explore whether a compact edge-AI device could detect fire and smoke in real time, making wildfire monitoring more accessible, portable, and responsive.
What it does
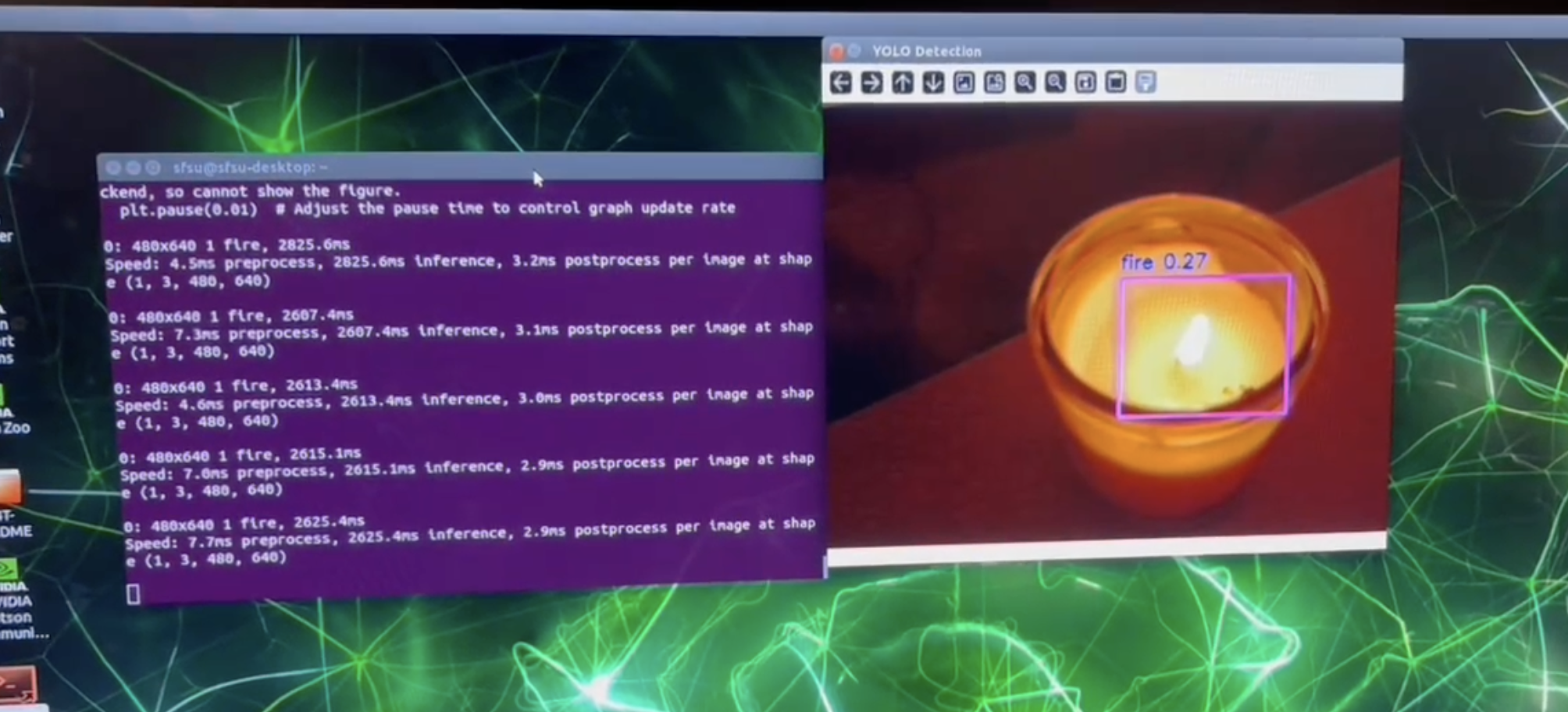
Wildfire-Detection is an AI-powered object detection system that identifies wildfire-related visual signals, specifically fire and smoke, from a camera stream. The project fine-tunes a YOLO object detection model on a custom wildfire dataset and deploys the trained model on an NVIDIA Jetson Nano for real-time inference. The system can run local detection through deploy/demo.py, and it also supports a remote camera streaming workflow through deploy/camera.py when camera capture and model inference need to run on different devices.
How we built it
We built the project by first preparing a custom annotated dataset containing wildfire, fire, and smoke images. Then we fine-tuned a YOLO model using the training scripts and configuration files in the train/ directory. After training, we saved the best model weights in the weights/ and deployment folders.
For deployment, we set up the NVIDIA Jetson Nano environment and created scripts to load the fine-tuned YOLO model, move inference to CUDA when available, and process video input in real time. Because the Jetson Nano environment has strict compatibility requirements, we separated the project into training, model weights, and deployment components. We also experimented with a frontend-backend style setup where one device captures video and sends frames over a socket to the Jetson Nano for inference.
Challenges we ran into
One of the biggest challenges was deploying modern YOLO dependencies on the Jetson Nano. The Jetson Nano system is based on Ubuntu 18.04 and comes with Python 3.6.9, while Ultralytics YOLO requires Python 3.7 or newer. Upgrading the system Python caused Jetson’s local terminal environment to break, so we had to recover the system through SSH and move to a safer virtual environment approach.
Another challenge was preserving GPU acceleration. Installing standard PyTorch, Torchvision, or OpenCV packages from PyPI can result in CPU-only versions, which significantly reduces inference speed on Jetson Nano. We also ran into camera-related issues: standard OpenCV did not support the Jetson camera pipeline properly because of GStreamer limitations, and the CSI camera appeared to have either hardware damage or driver compatibility problems.
To work around these limitations, we tested CPU-based inference first and later streamed video from a Mac camera over the local network to the Jetson Nano. This allowed the full detection pipeline to run, even though performance was limited without proper CUDA acceleration.
Accomplishments that we're proud of
We are proud that we successfully trained a YOLO-based wildfire detection model capable of detecting both fire and smoke. We also built a working deployment pipeline for the Jetson Nano, which is a resource-constrained edge device. Even though the hardware and software environment introduced many compatibility issues, we were able to debug the deployment step by step, document the problems, and create practical workarounds.
Another accomplishment is that the project is structured clearly for future development: training code, model weights, deployment scripts, Jetson-specific requirements, and deployment issue analysis are all separated. This makes the project easier to reproduce, improve, and extend.
What we learned
Through this project, we learned how important edge deployment is beyond just training a machine learning model. A model that works on a laptop does not automatically work well on embedded hardware. We learned about the challenges of Python version compatibility, CUDA-enabled PyTorch installation, Jetson-specific OpenCV builds, GStreamer camera pipelines, and the tradeoffs between local inference and remote streaming.
We also learned that real-time AI systems require both machine learning knowledge and systems engineering. Dataset quality, model accuracy, inference speed, hardware drivers, camera input, and deployment environment all affect the final result.
What's next for Wildfire-Detection
Next, we plan to improve the Jetson Nano deployment by testing a more compatible USB camera and re-evaluating Docker-based deployment to restore proper GPU acceleration. We also want to optimize the model for faster edge inference, potentially using TensorRT or a lighter YOLO variant.
In the future, Wildfire-Detection could be expanded into a more complete wildfire monitoring system with alert notifications, GPS/location tagging, cloud logging, and support for multiple camera nodes. We also plan to improve the dataset with more diverse wildfire and smoke scenarios so the model can become more robust in real-world outdoor environments.
Built With
- acceleration
- also
- and
- another
- basic
- camera
- cuda
- device
- documented
- faster
- for
- frames
- from
- gstreamer
- inference.
- jetson
- jetson-nano
- managed
- nano
- opencv
- planned
- programming**
- project
- pytorch
- remote
- socket-programming
- streaming
- support
- the
- to
- ubuntu-18.04
- ultralytics
- used
- using
- was
- we
- with
- yolo

Log in or sign up for Devpost to join the conversation.