
Inspiration
WiggleGram was inspired by classic lenticular and early internet “wiggle” 3D photography — where slight shifts in perspective create a powerful illusion of depth. We wanted to recreate that dynamic effect without bulky multi-rig setups or heavy post-production. The goal was simple: capture depth in a single moment using synchronized hardware.
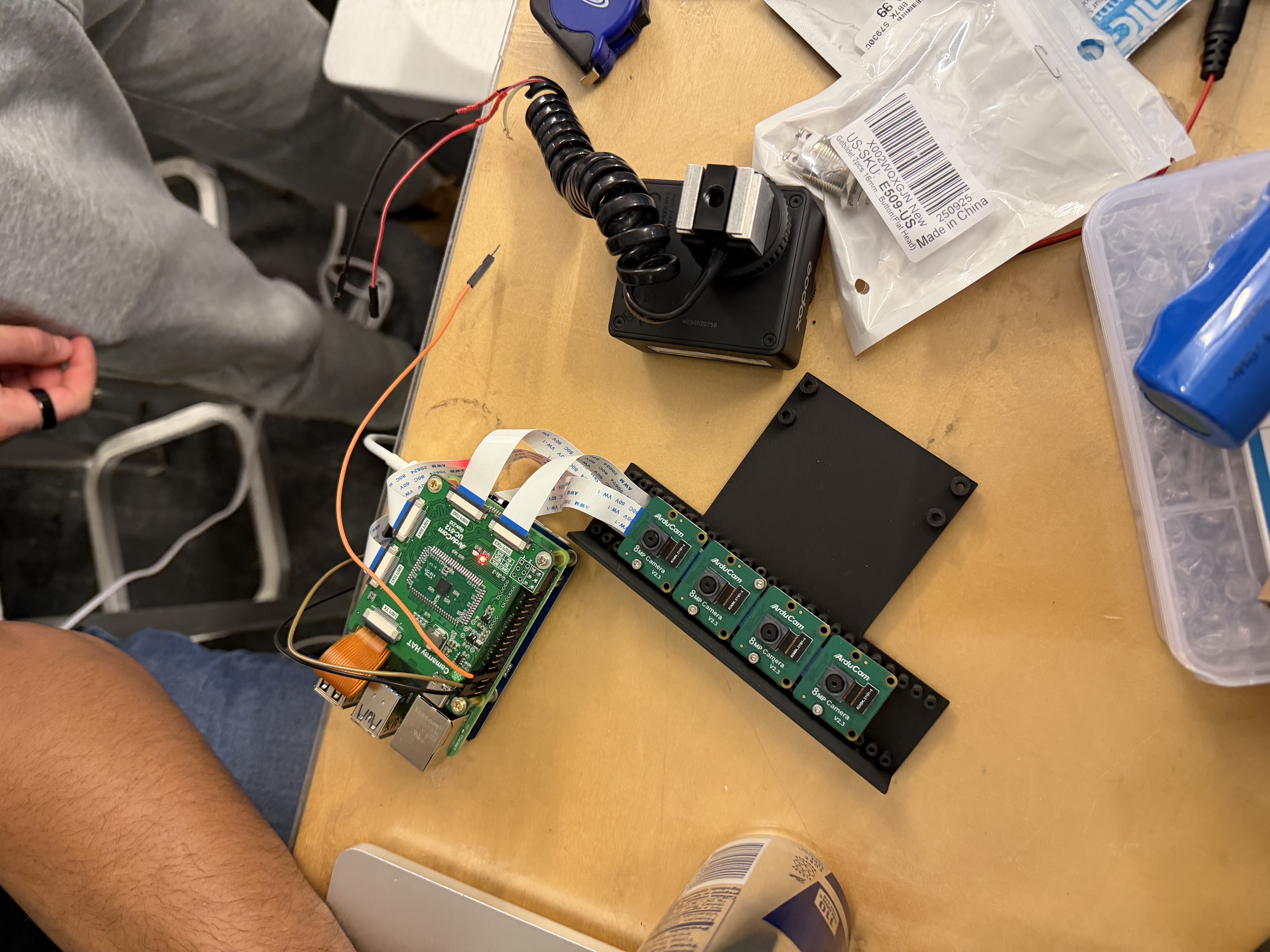
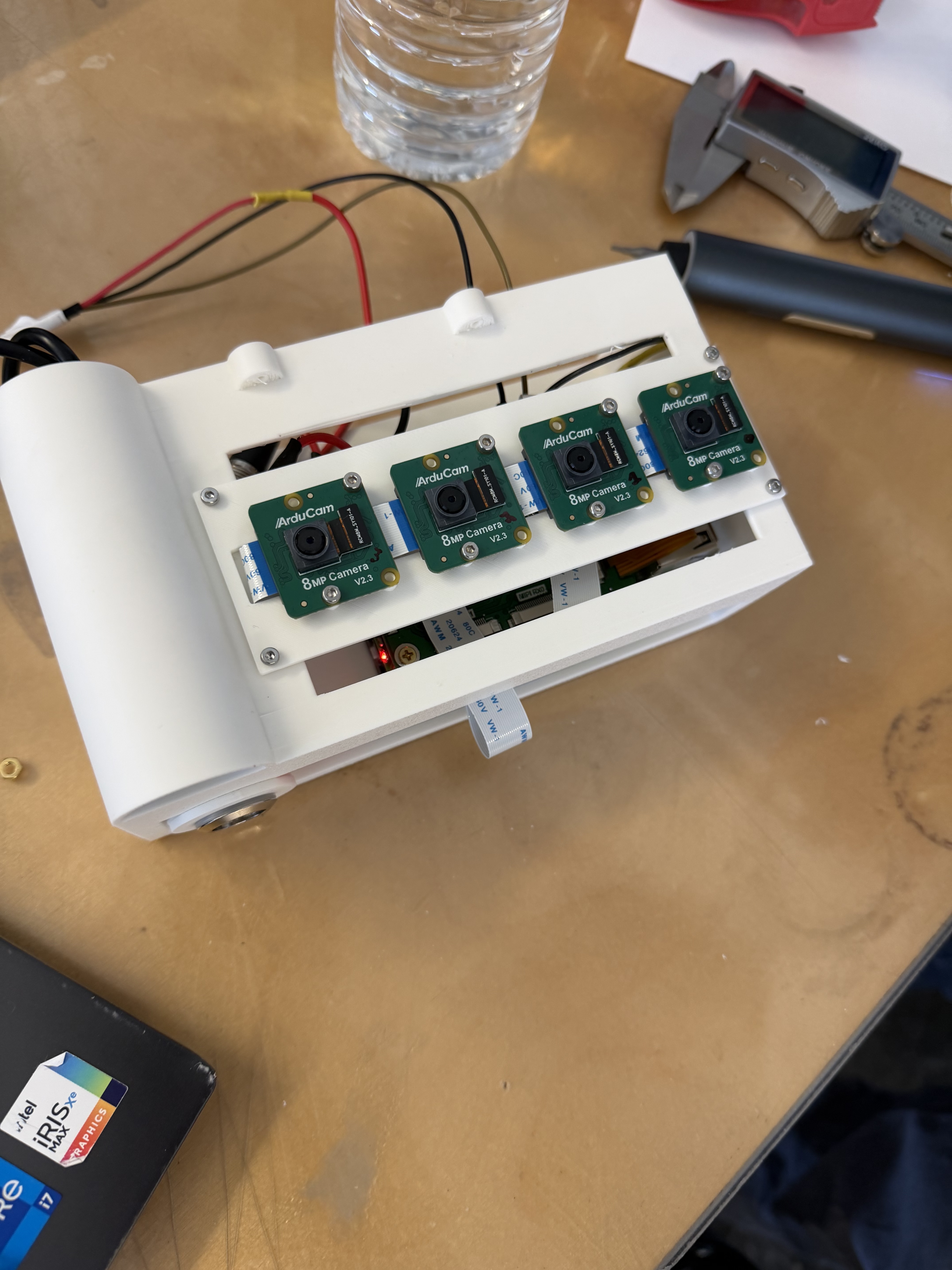
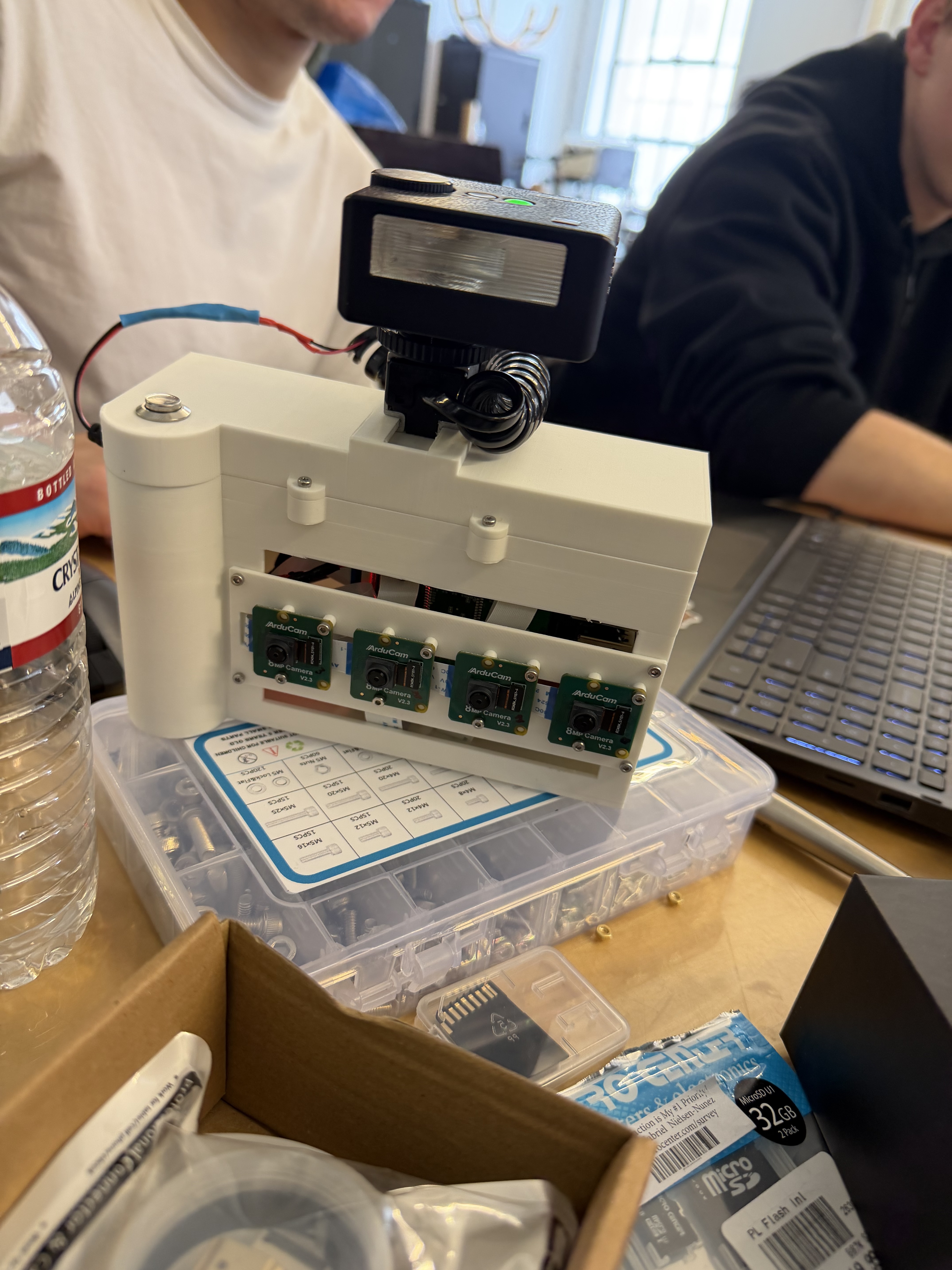
How We Built It
Our system uses four horizontally spaced cameras mounted along a fixed baseline. By capturing images simultaneously from slightly different viewpoints, we generate parallax — the relative shift in object position as viewpoint changes.
The four images are stitched into a looping animation that cycles between perspectives, producing the signature “wiggle” effect.
What We Learned • The importance of precise synchronization — even millisecond offsets caused visible artifacts. • Mechanical alignment is critical; small angular errors introduced vertical disparity. • Baseline spacing dramatically affects depth perception and comfort.
Challenges • Achieving true simultaneous capture across four modules. • Calibrating intrinsic and extrinsic camera parameters. • Minimizing distortion and stitching artifacts in the final animation. • Packaging four sensors into a compact, rigid enclosure without flex.
Outcome
WiggleGram demonstrates that compelling 3D-style imagery can be achieved with thoughtful hardware architecture and geometric principles — turning static photos into immersive motion experiences.
Built With
- 3d-printing
- cad
- camera
- onshape
- python
- rasberry-pi

Log in or sign up for Devpost to join the conversation.