-
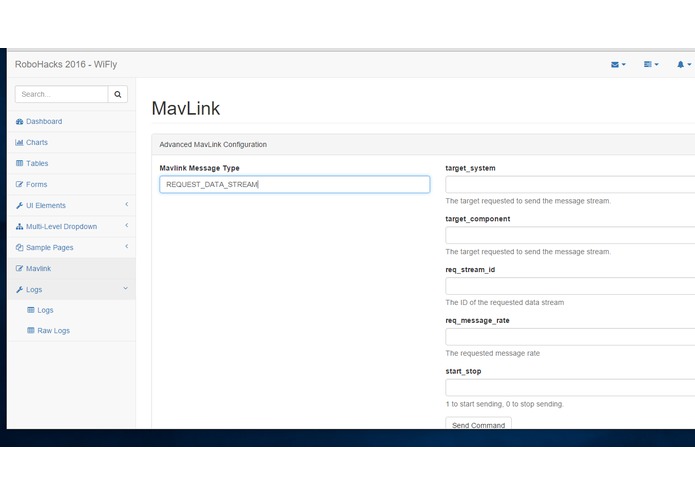
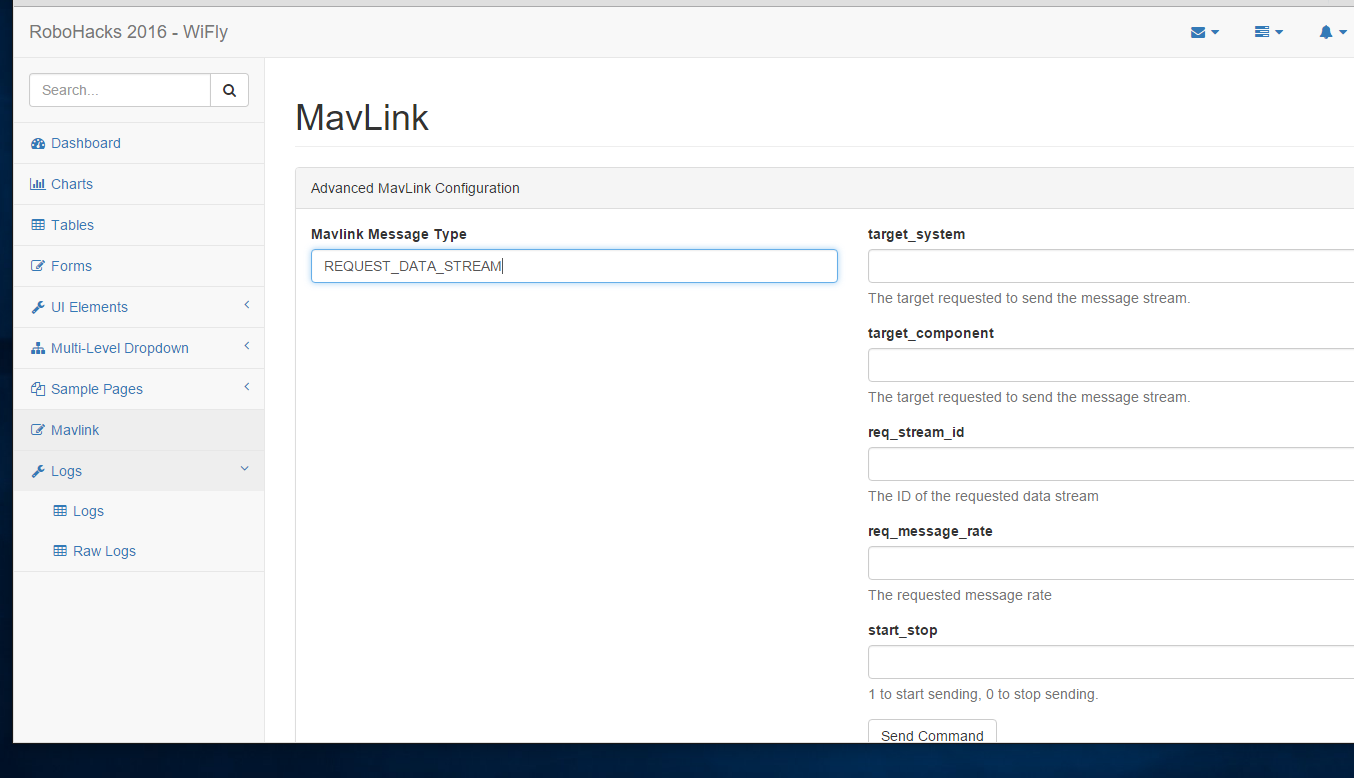
Sending Commands
-
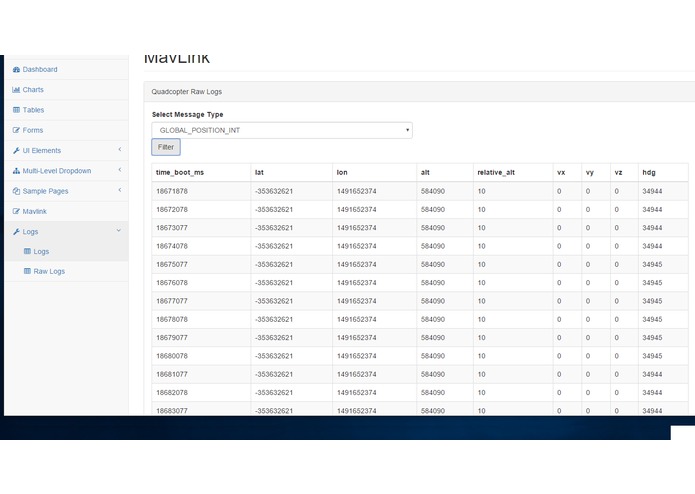
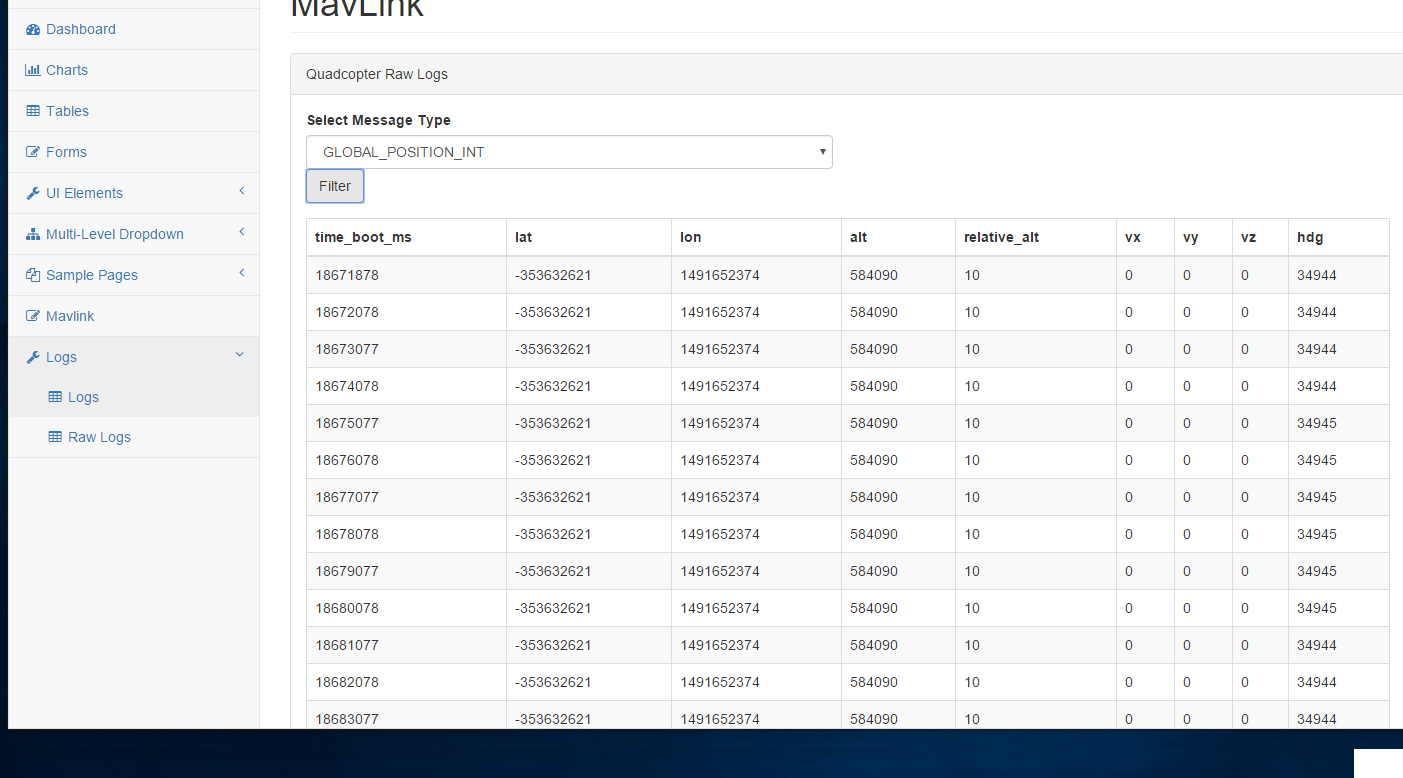
Real-time Telemetry Data
Inspiration
Our inspiration is a long-term dream project of mine where I would like to connect a drone the cellphone network so that it has access to 3G internet. This way the range of the drone is unlimited which I think is pretty exciting.. This way I could take on road trips and never have to leave my keyboard :D #programmer
What it does
How I built it
The quadcopter flies using the Arduino with the whole IMU and GPS set up. Then we connected a RaspberryPi to the drone. Using the pins on it RPi we can send serial data to the Arduino's Telemetry ports using the Mavlink protocol which ArduCopter is designed to respond to. The RaspberryPi running a small Python and Node script acts as a proxy to connect via a websocket to our server as well as building the mavlink messages and serialzing / deserializing data. This way the server running in the cloud can send commands to the Drone!
Challenges I ran into
Setting up the Raspberry Pi caused us a lot of problems :( And loading the ArduCopter Firmware on the Arduino proved to be problematic at times with compatibility issues.
Accomplishments that I'm proud of
All of it! Mavlink was tough to figure out.
What I learned
A lot! (running out of time for submission.. ask me some time!)
What's next for WiFly
Get a $20 GSM shield to connect it to the cellphone network
Built With
- amazon-aurora
- amazon-ec2
- amazon-lambda
- amazon-mysql
- amazon-web-services
- angular.js
- arduino
- html5
- javascript
- mongodb
- node.js
- raspberry-pi
- socket.io
- tcp

Log in or sign up for Devpost to join the conversation.