Inspiration
Cats can be a toss-up... Some people love them, while some people hate them. But just like any other pet, cats need and deserve the opportunity to release their energy. Some owners may play with their own cats with different toys, while others may spend agonizing hours training their cats to only scratch some arbitrary pole within their homes. We realized that there could be an interactive avenue for cats to expend their energy at home that could come naturally to our kitten friends' instincts.
What it does
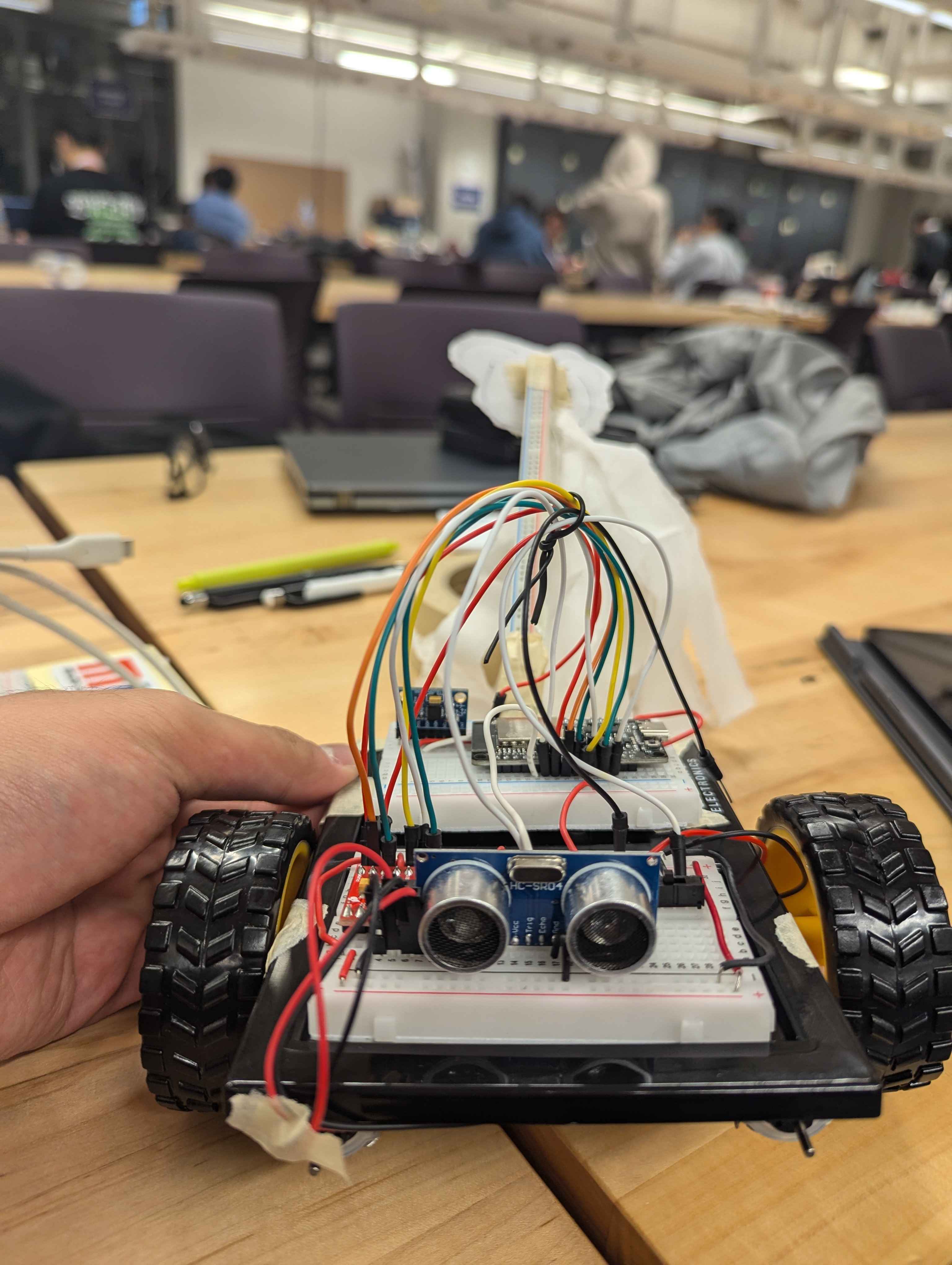
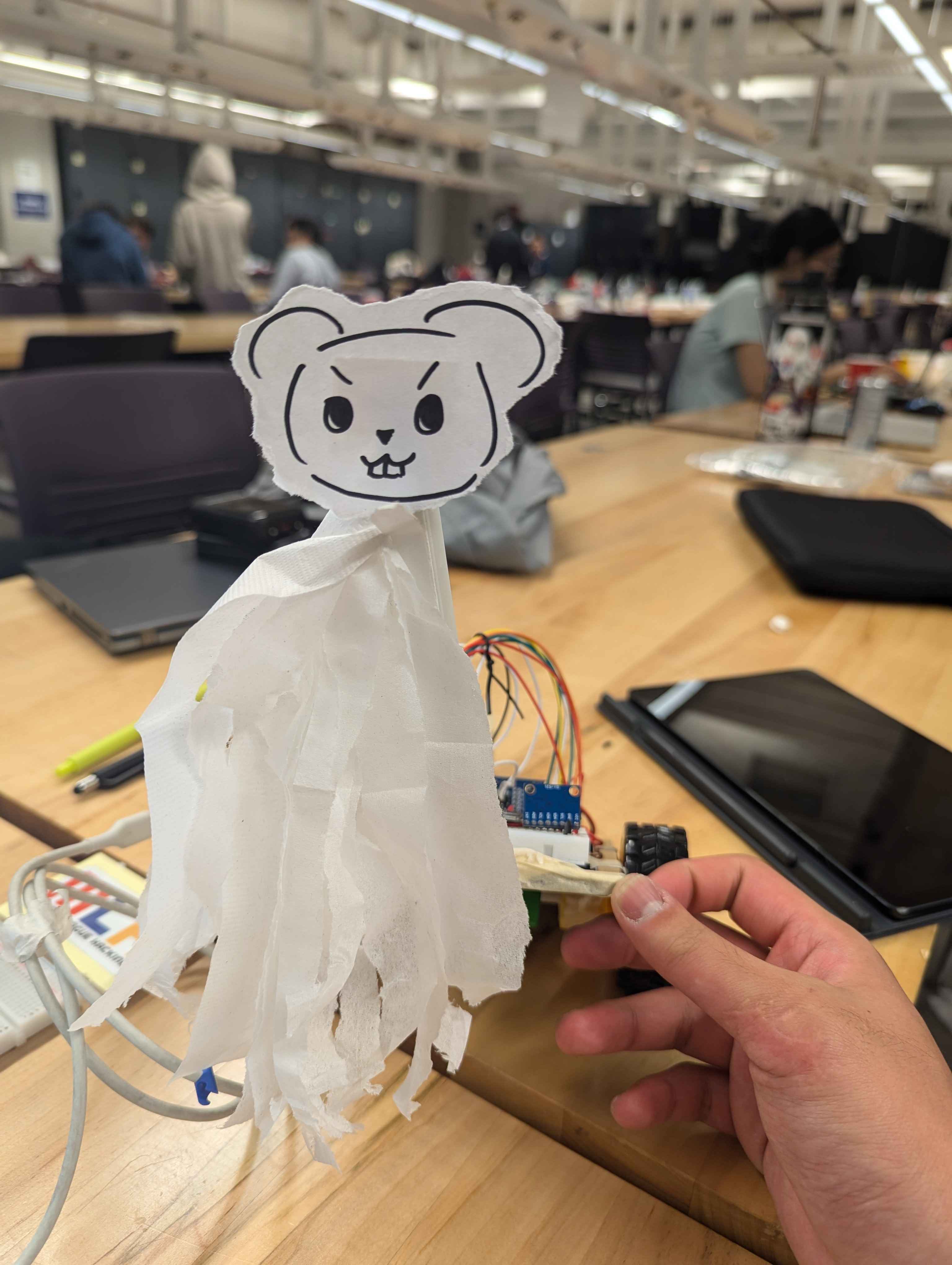
The Whisker Wheel is a quick, fun robot that constantly runs about with fluttering whiskers. Its speed, quick change of motion, as well as flashy whiskers are sure to activate the neurons of any feline friend. With its two DC motors, ultrasonic sensors, and IMU, the Whisker Wheel is capable of extremely unpredictable movement all while avoiding imminent obstacles. All these sensors communicate with an ESP32, which can be connected via Bluetooth on any device to gain insights as to your pet's activity.
How we built it
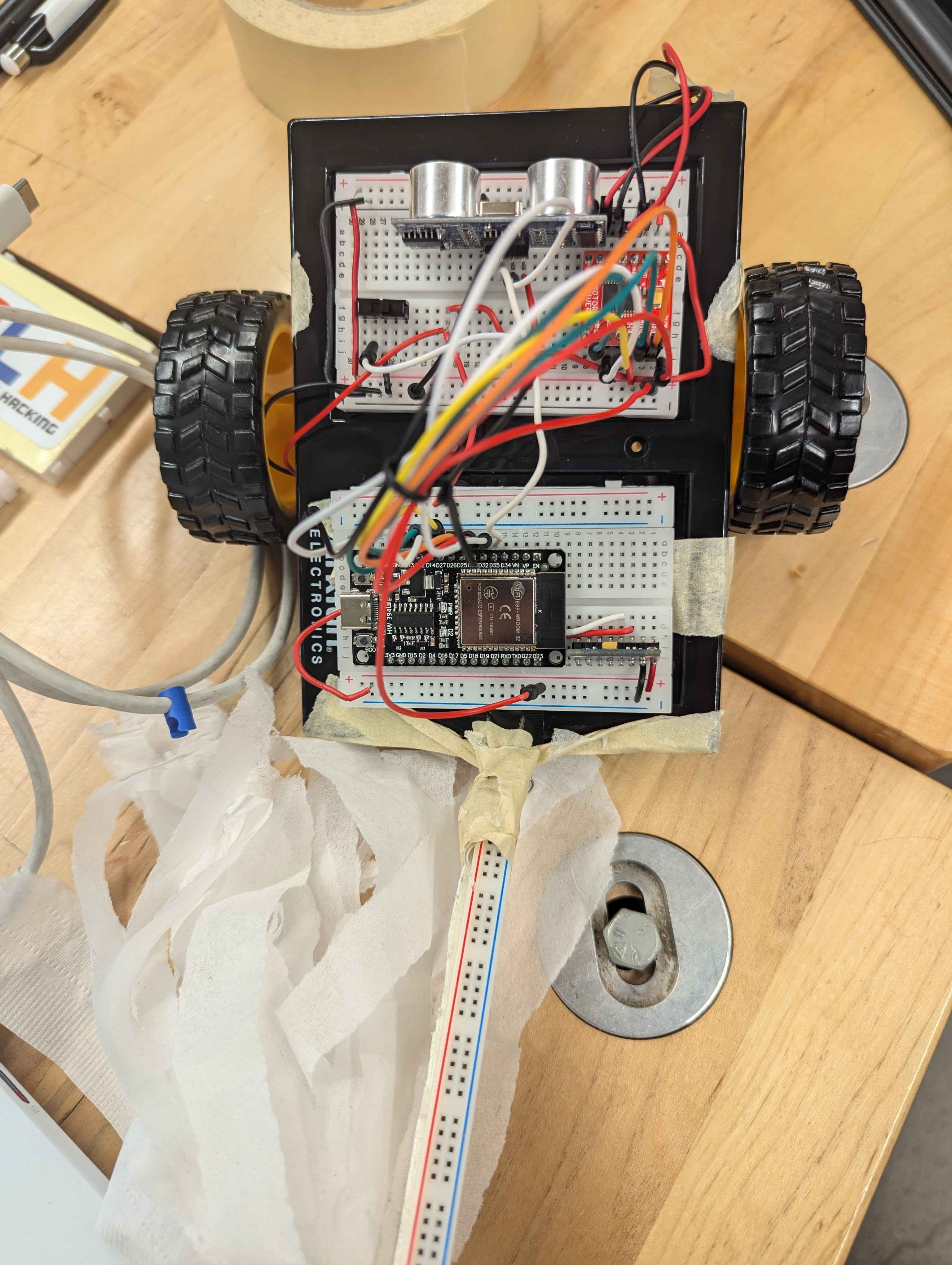
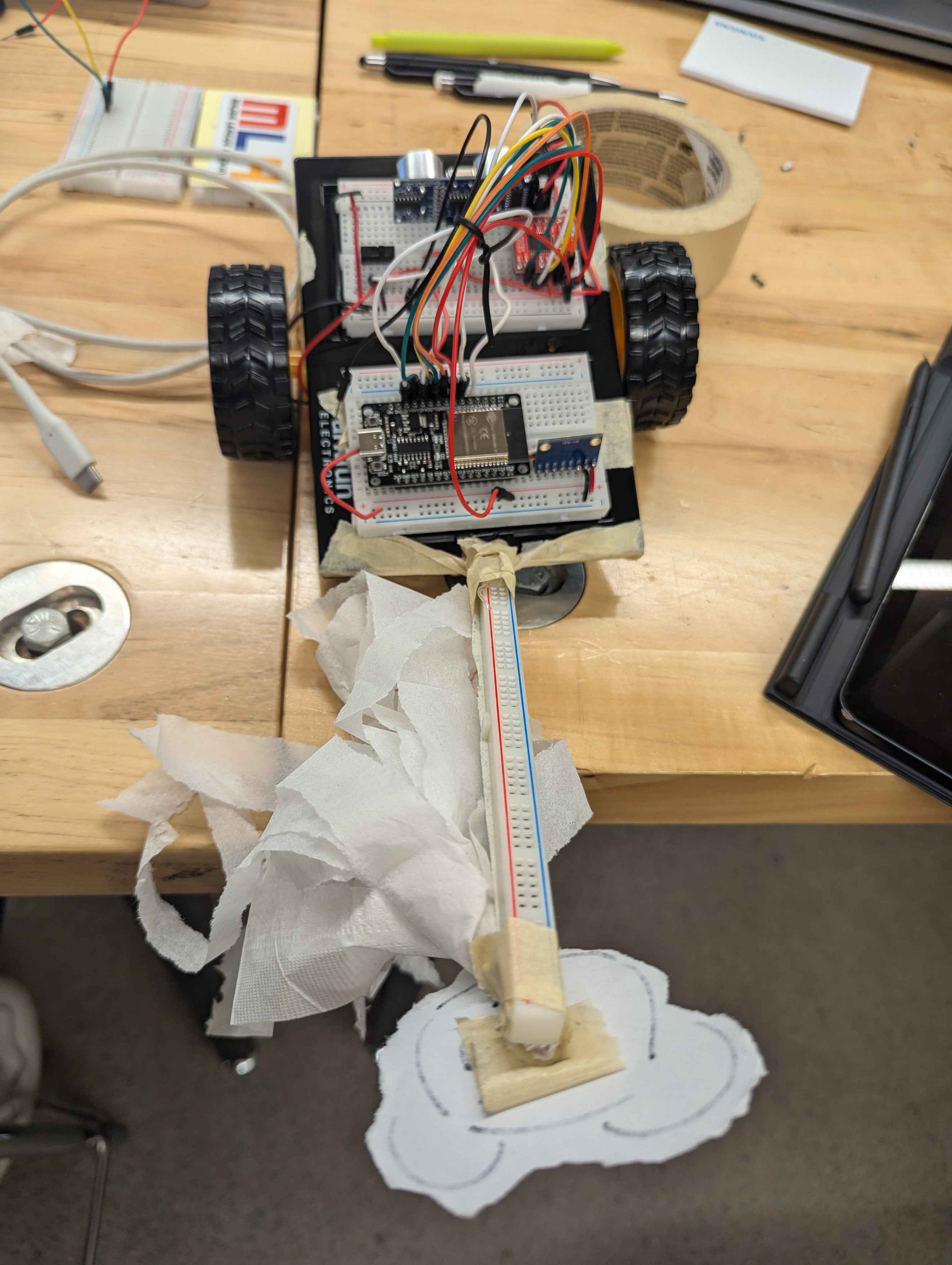
The Whisker Wheel contains the HC-SR04 Ultrasonic Sensor, a motor driver, two 48:1 DC motors, MPU6050 IMU, and an ESP32, all connected with many many jumper cables and two mini breadboards. On the software side, we were able to write all the firmware through Arduino using PlatformIO. Though a simple-looking bot, the firmware involved was actually quite extensive, with complex operations like Kalman filters performed on the accelerometer and gyroscope readings of the MPU6050 in order to extract meaningful data on our cat bots.
Challenges we ran into
Well... where to get started? The entire build process was a roller coaster ride from start to finish. Arriving late to Hack the North due to our flights, we were a a loss as to what to build while many other teams had already started fleshing out their dream projects. We actually went through many iterations of different project ideas before finally settling upon our final Whisker Wheel idea, and even then, the path was DEFINITELY not smooth. Wireless communication, for example, had been one of our goals, and while we had initially built up the entire project on an Arduino UNO, we soon came to realize that the Bluetooth module (HC-06) we had was completely faulty. With less than a few hours left, we had to bite the bullet and switch everything over to ESP32 for its built-in wireless capabilities.
Accomplishments that we're proud of
First and foremost, we are extremely proud to have built up this project to such an extent. We wanted to make something novel and fun throughout the entirety of our brainstorming projects, but we are most proud of how we were able to retain the project's novelty while managing to fit in many more technical elements to various aspects of our projects (e.g. wireless communications, Kalman filtering, etc.)
What's next for Whisker Wheel
During this hackathon, we were quite limited in our access to various sensor modules. We had to use Kalman filtering on an IMU to find many fields like orientation and position, when there were many better sensor modules for the job. With better sensors, we hope to be able to provide a more extensive array of gathered data. With more data, the ways we can entertain and play with our pets become endless.

Log in or sign up for Devpost to join the conversation.