-
-
Robo
Inspiration
I was inspired by how modern warehouses use robots to speed up work and reduce human strain. I wanted to design a basic robot assistant that could carry packages or supplies between areas.
What it does
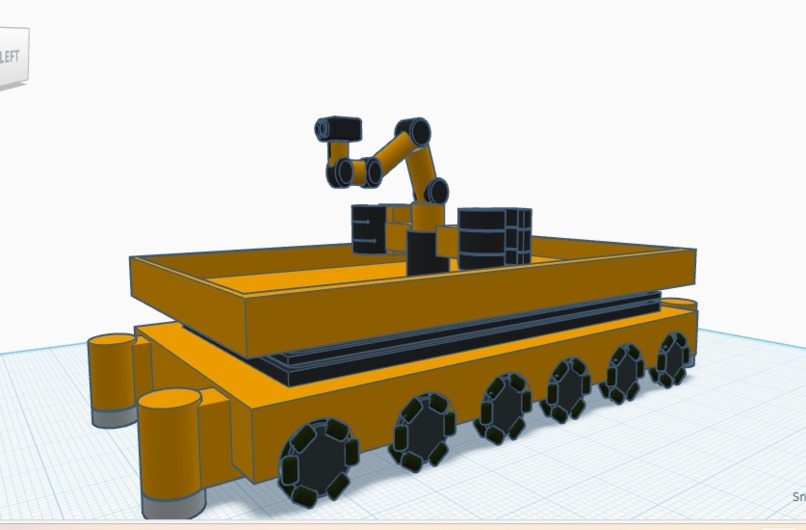
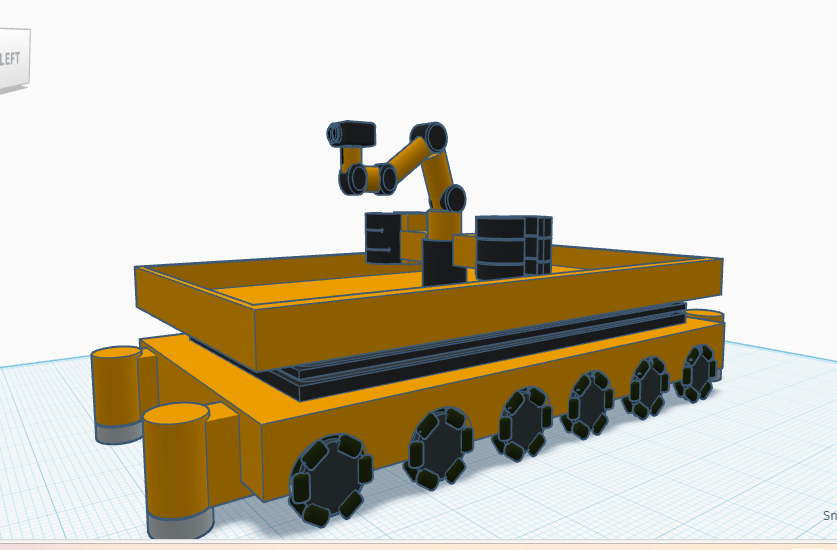
The robot has a flat surface to hold boxes and is designed to . It has wheels for movement and a sensor mount in front for obstacle detection. And with its robotic arm has a censor and scans the packages it was programmed to do. And uses its other 2 arms with claws to pick them up.
How we built it
I used Tinkercad to design the robot, starting with basic shapes like boxes and cylinders. I added wheels, a platform, and space for sensors. I adjusted the sizes and grouped the parts to form a clean structure.
Challenges we ran into
One challenge was getting the scale right — making sure the robot wasn’t too big or too small for standard warehouse shelves. Another challenge was aligning parts perfectly when grouping them.
Accomplishments that we're proud of
I'm proud of how balanced and functional the design looks. It feels realistic and has space for future features like a robotic arm or advanced sensors.
What we learned
I learned how to use Tinkercad more effectively, including grouping, aligning, and customizing parts. I also learned how to think in 3D and consider the real-world function of each part.

Log in or sign up for Devpost to join the conversation.