-

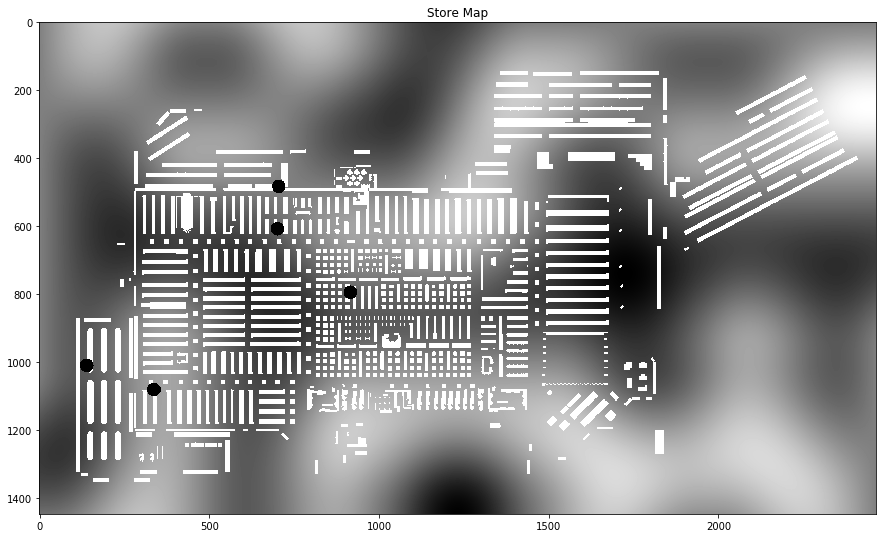
Five targets
-

Path planning
We 're inspired from travelling salesman problem and robotic path planning algorithm.
Built With
- jupyter-notebook
Combined Dijkstra and Greedy shortest path search
Five targets

Path planning
We 're inspired from travelling salesman problem and robotic path planning algorithm.

Leave feedback in the comments!
Log in or sign up for Devpost to join the conversation.