-
-
-
-
-
-
This image is currently processing. Please be patient...

Inspiration
The inspiration for our project was the fact that we all had a solid background in hardware and wanted to created something that not only incorporated real-life robotics knowledge but also utilized computer programming as well. We decided to create a rover that could be easily made, produced, and maneuvered, for people who require safety in their surrounding environments, such as American troops in active war zones. We also had considerable knowledge about small rovers that are used to safely disarm discreet bombs, so we wanted to understand not only how to maneuver a rover in tight locations but also how certain electronics could be used to allow the rover to take actions by itself.
What it does
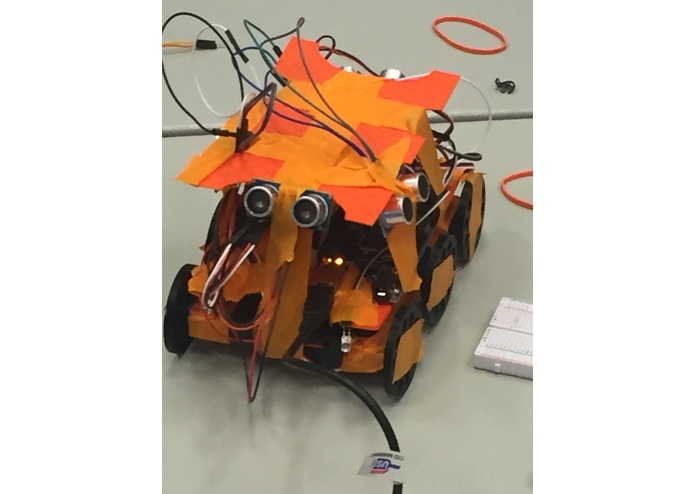
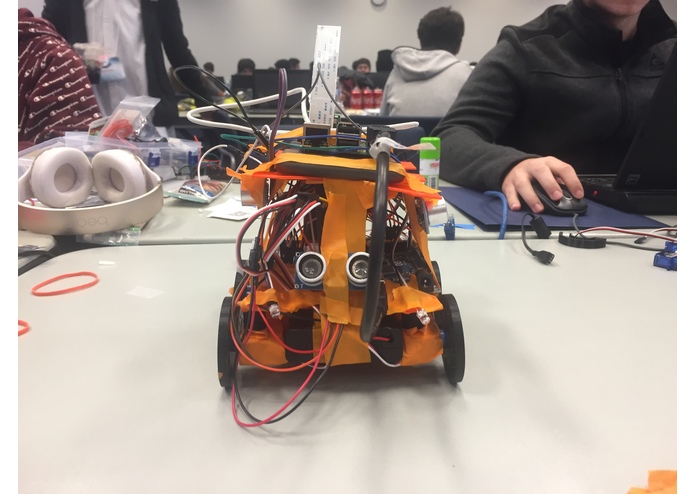
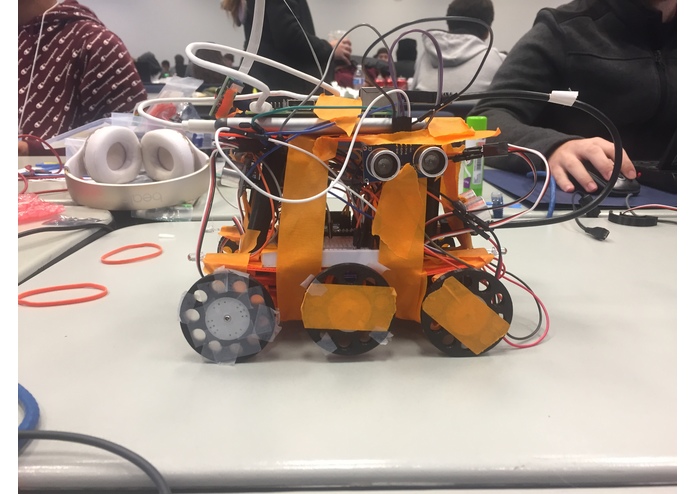
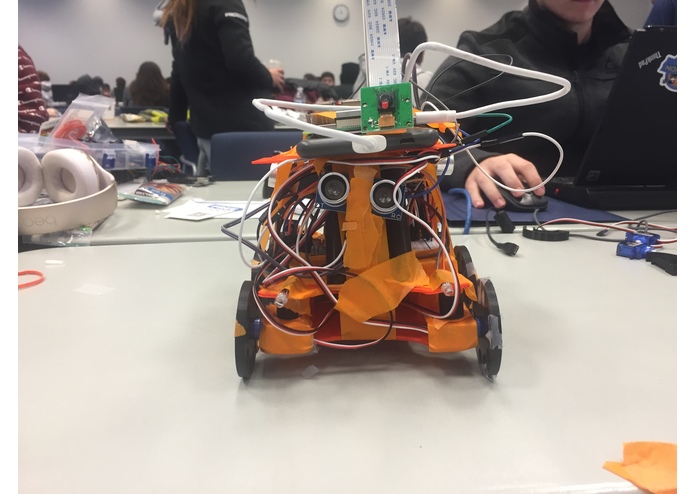
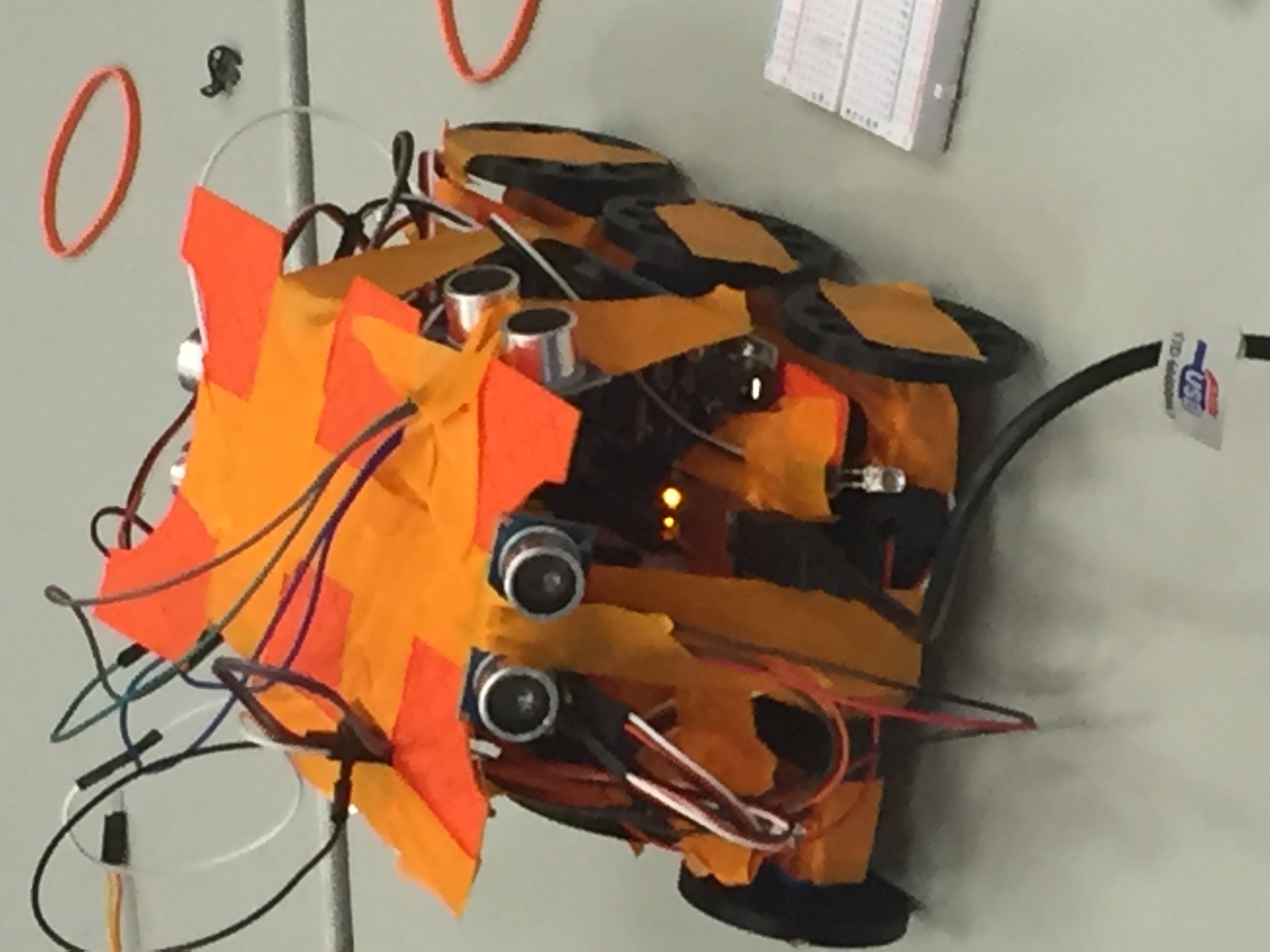
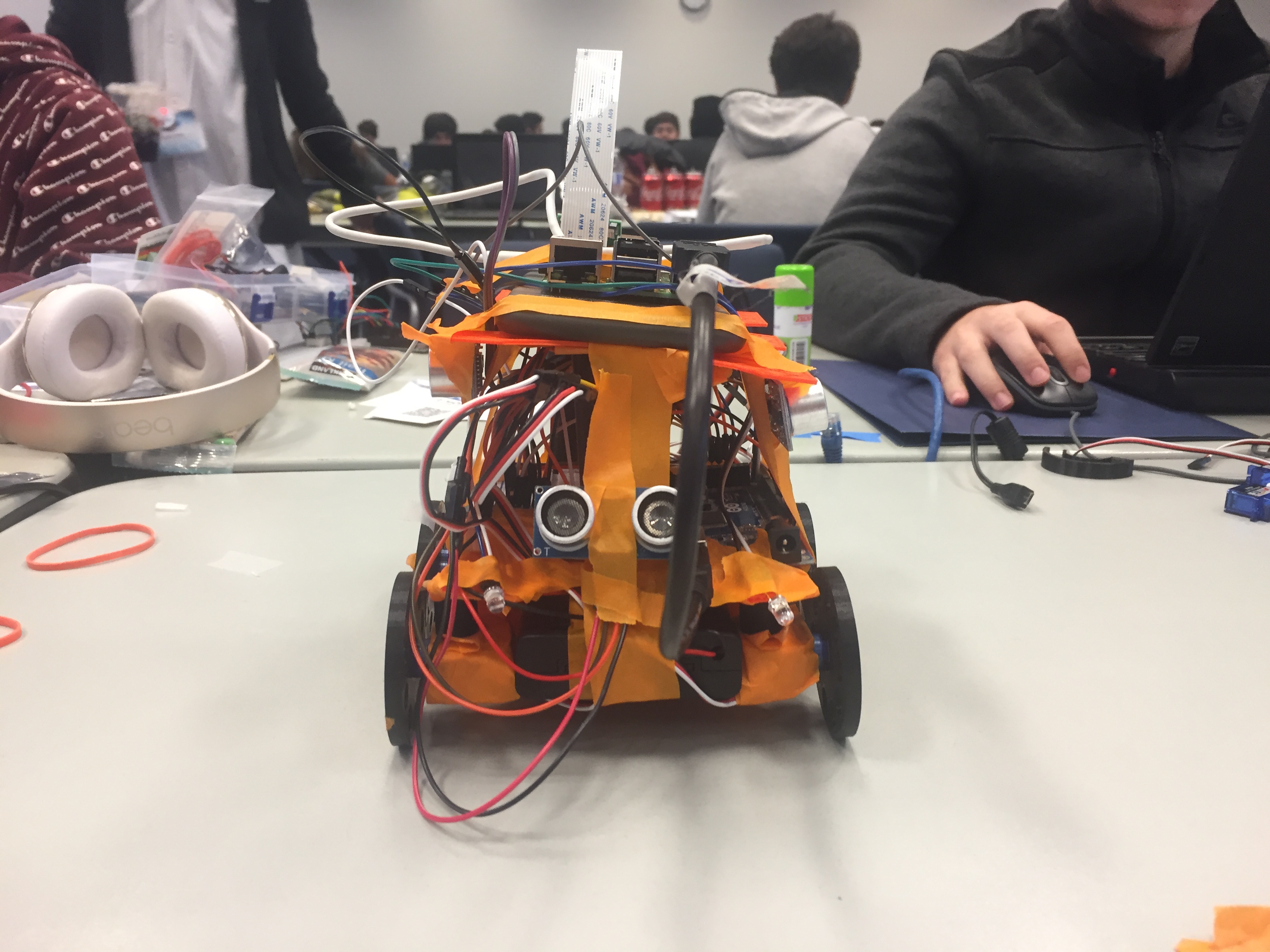
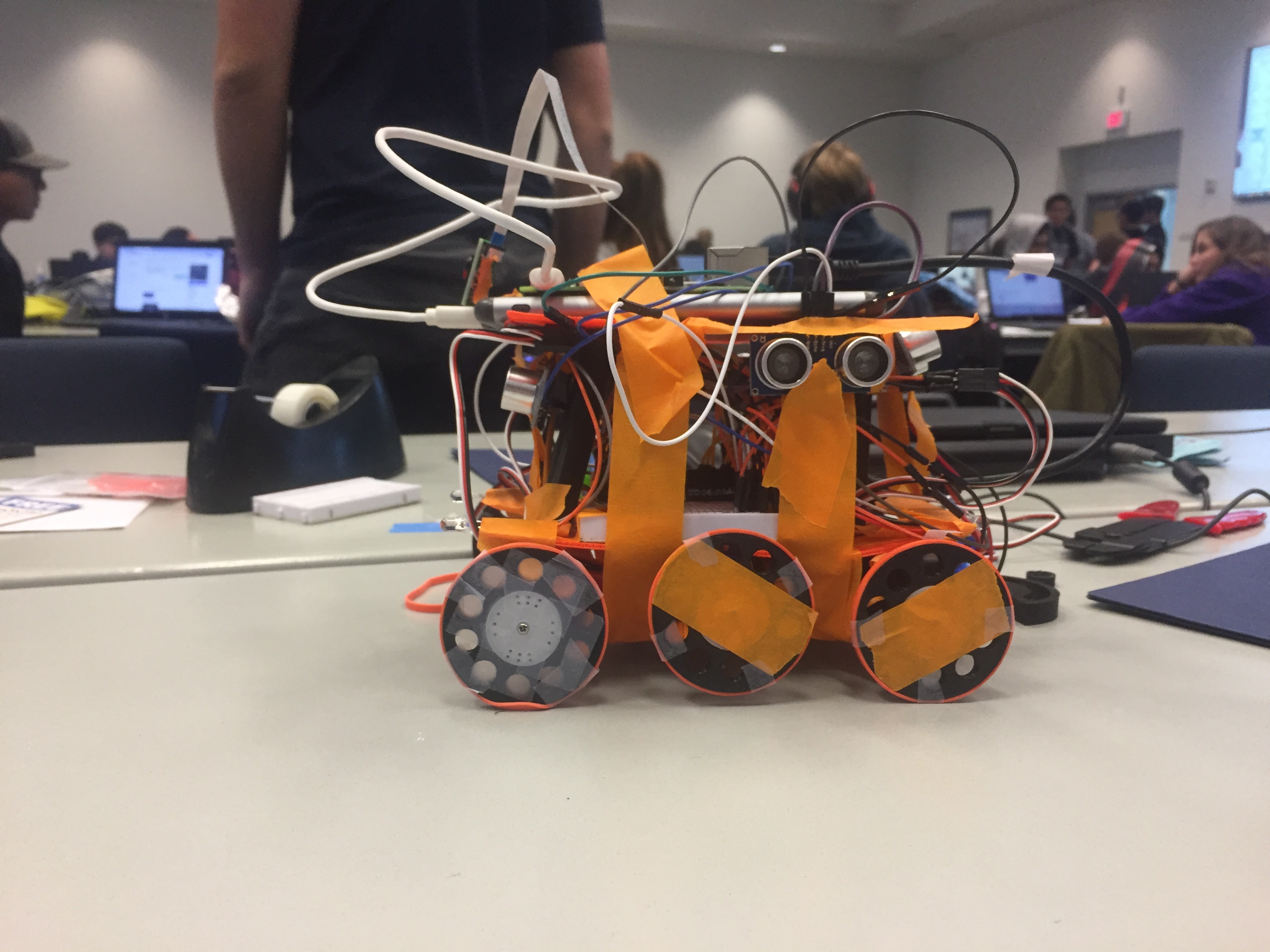
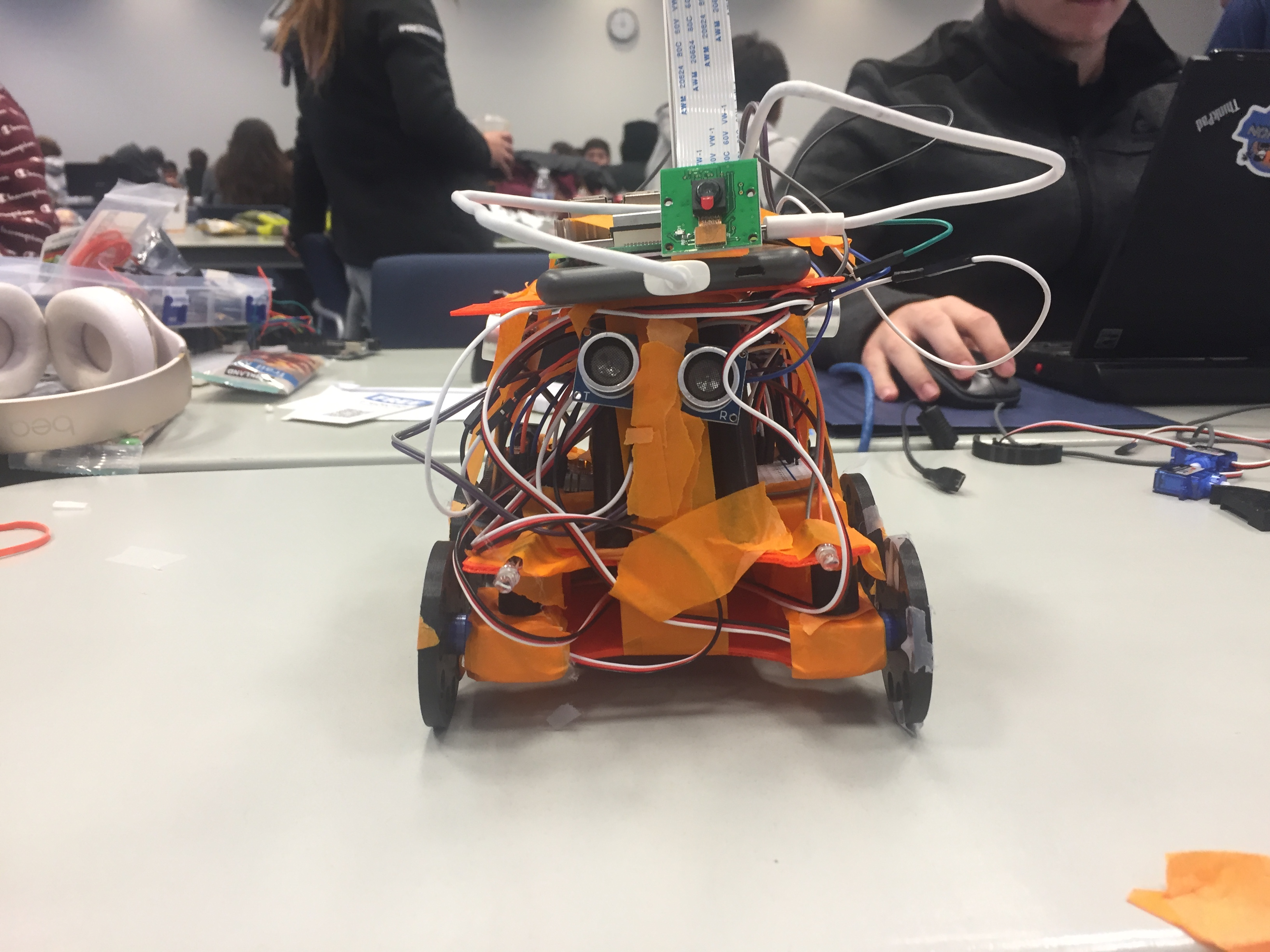
Our robot, known as WALL-E ver. 2.0 is a four-wheeled miniature robot that can be autonomously driven around a room using ultrasonic sensors that can guide the robot to the right direction. A camera is attached to the rover so that as it moves around, the user can see what objects are in the room ahead of them and what he should take into account. Furthermore, WALL-E ver. 2.0 also has a teleoperation mode in which the user can guide the rover and locate certain objects places manually.
How we built it
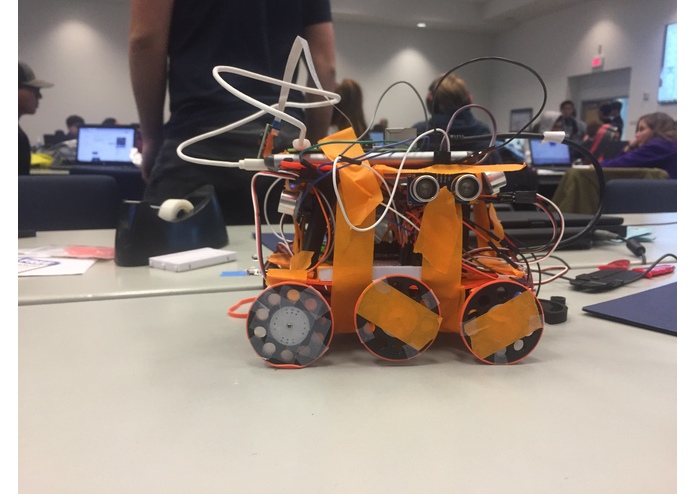
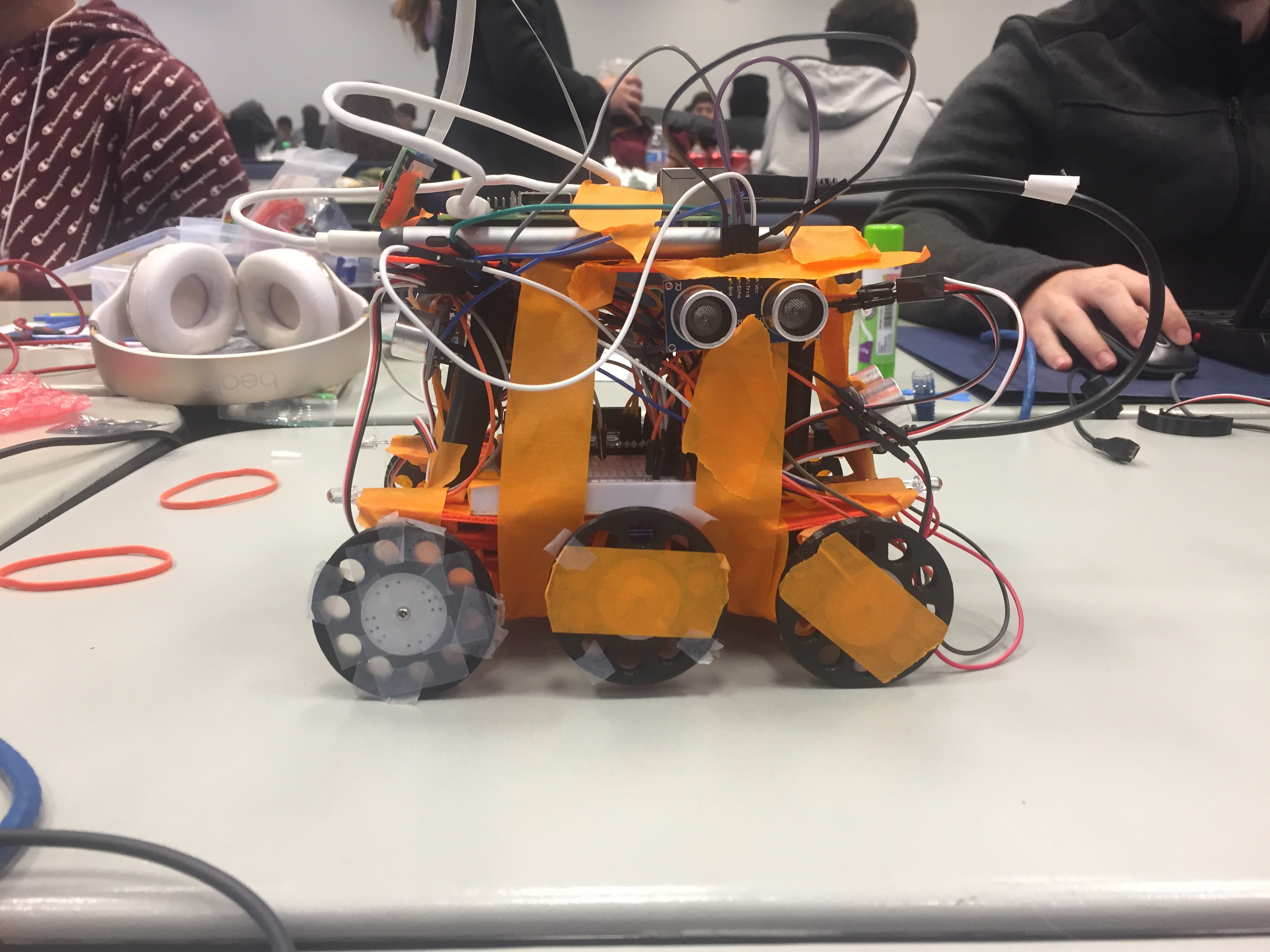
In order to have the adequate wheels as well as a purposeful chassis, we needed to design them using CAD software ourselves, and after we 3-D printed all the pieces, we assembled 6 continuous servo motors and attached them to the chassis, with a 3-D printed wheel each. Furthermore, we attached the Arduino, Raspberry Pi, battery packs, and breadboards all on top of the chassis, so in order to do this, we had to layer the equipment on multiple levels. Finally, we had to connect each certain electronic piece to some software, and eventually we developed functions that allowed us to program the robot effectively.
Challenges we ran into
One main challenge we ran into was that the 3-D printed parts were often faulty and it took numerous tries to successfully print them, but we eventually got all the pieces. Another problem we faced was that it was quite hard to connect the code from the Raspberry Pi and the user interface to the Arduino and the actual robot, so we spent much of Saturday morning testing and debugging our code. Finally, we had one too many breadboards on our robot and it could not fit, so we had to rewire the Arduino and rearrange the code.
Accomplishments that we're proud of
We're proud that we were able to create a fully functional robot within 20 hours and that it was able to be controlled by the user. We're also proud that our robot was created entirely from scratch and was relatively inexpensive to create.
What we learned
We learned that bridging the gap between hardware and software is a very hard thing to do, but once we are able to do it, it is a very enjoyable thing to look at our final project and know that we made all of it.
What's next for WALL-E ver. 2.0
next up for WALL-E ver. 2.0, we would like to make the rover look more professional with entirely 3-D printed parts and less tape on it. Furthermore, we would like to add more functioanlity to it, such as it being able to map out a room of the room it is in.

Log in or sign up for Devpost to join the conversation.