-
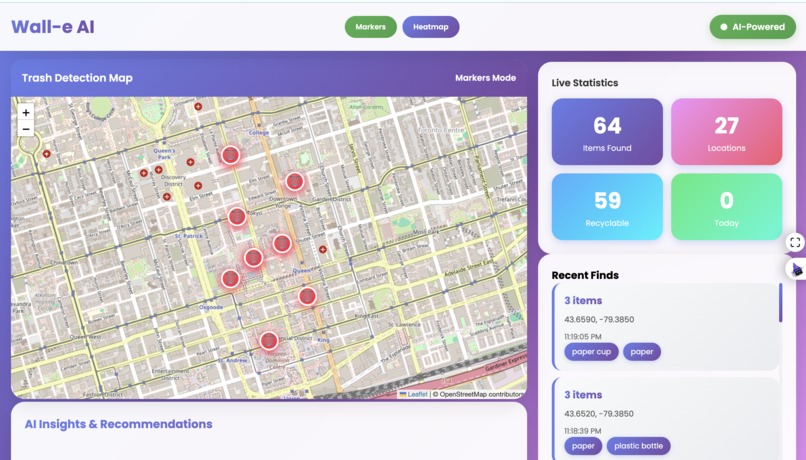
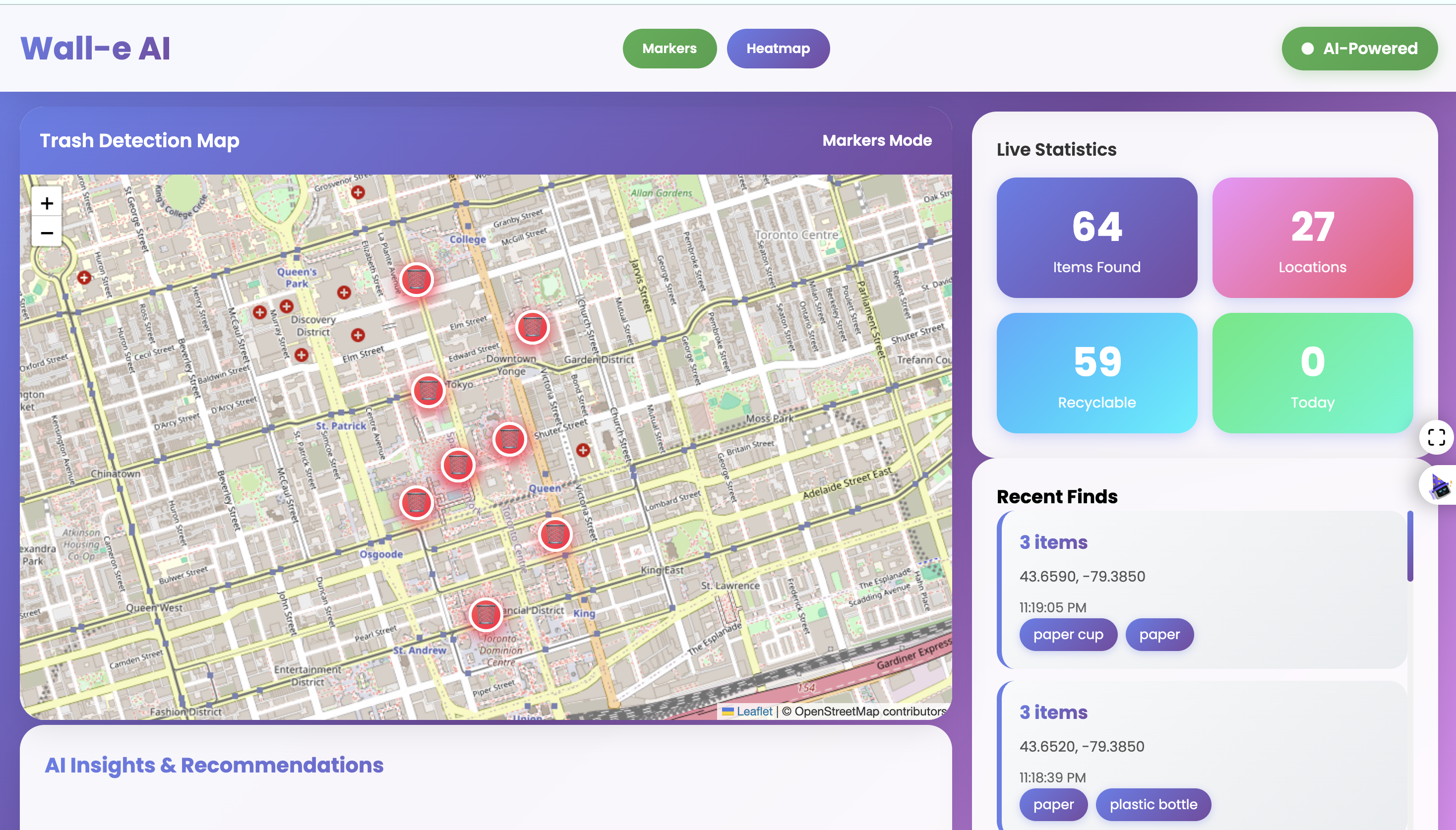
Webapp interface
-
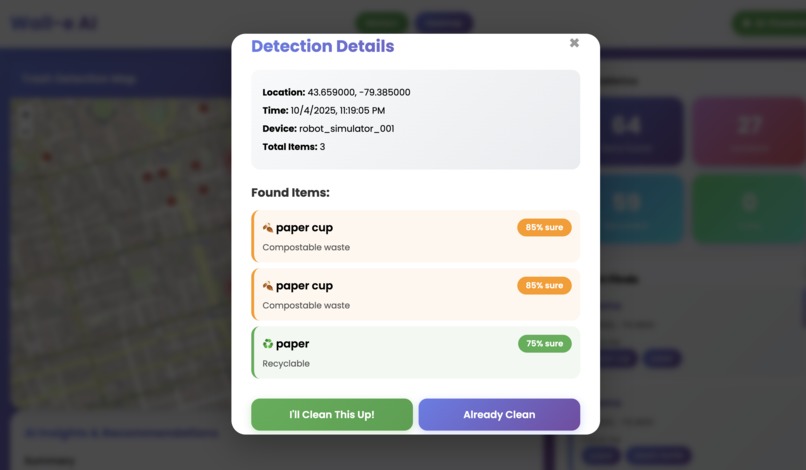
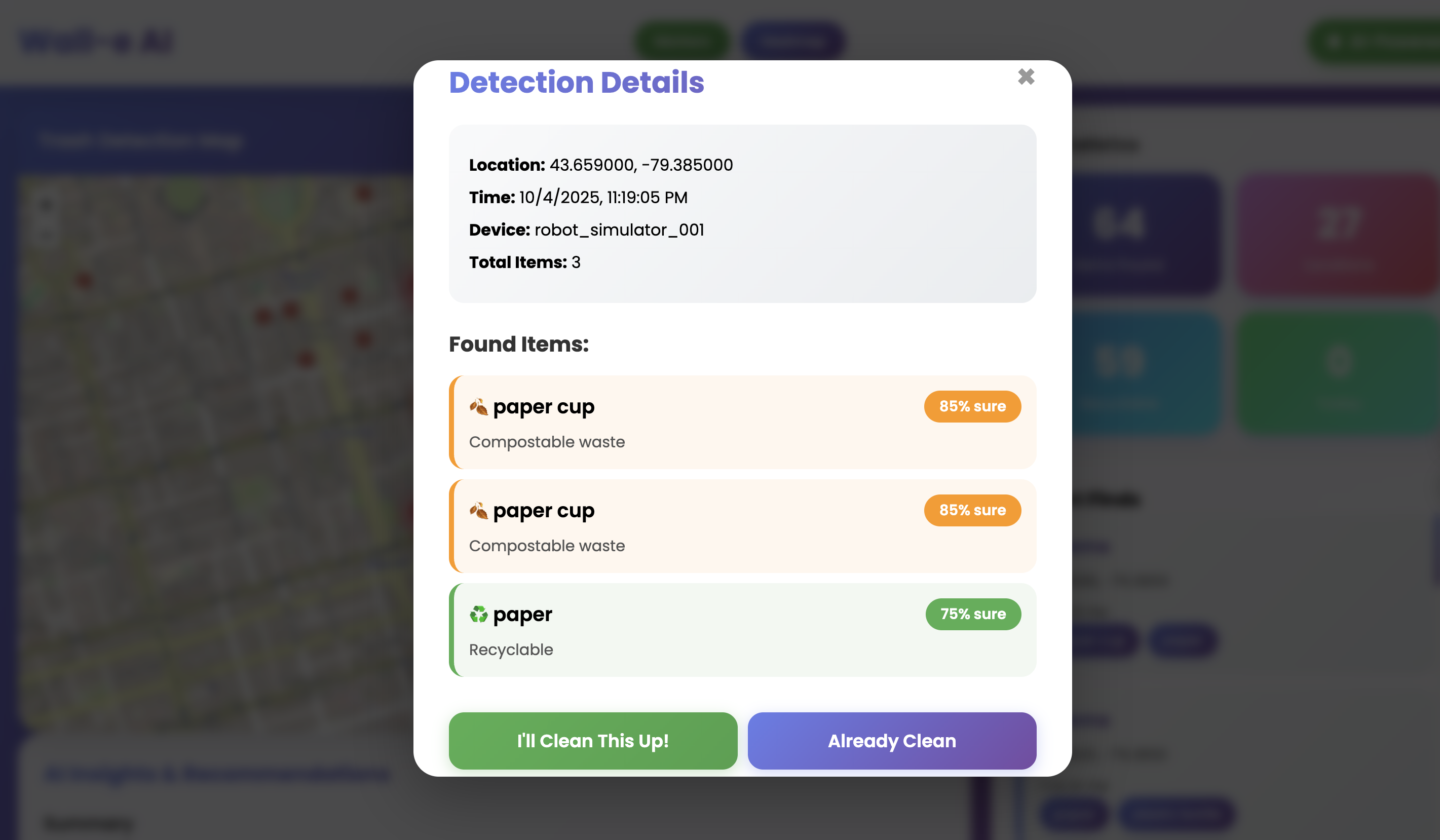
Detection report card for each trash site (sample data used)
-
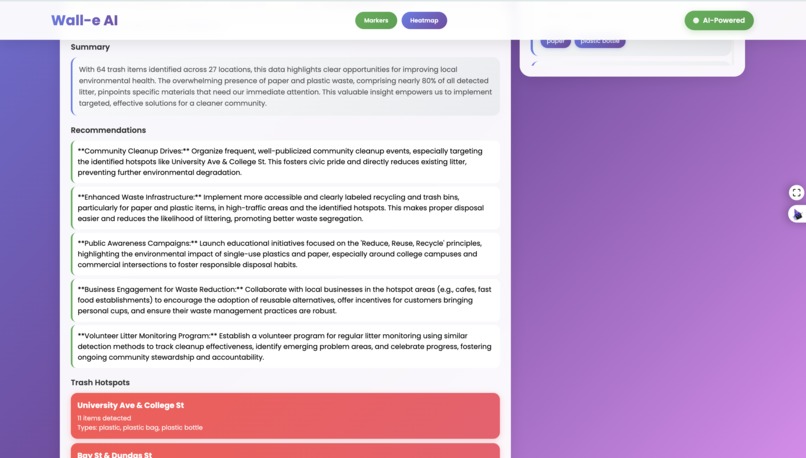
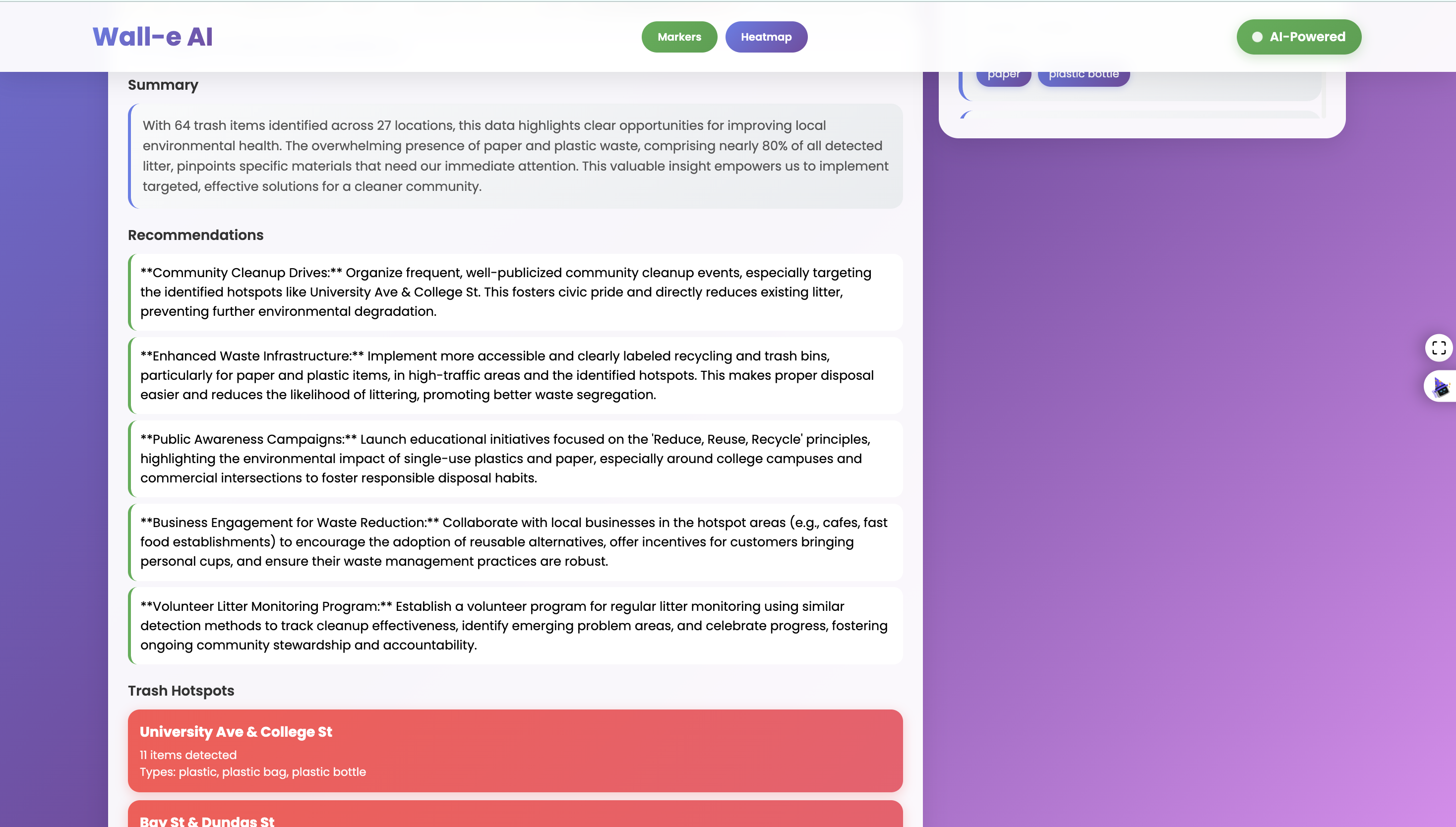
AI summary, cleanup/action recommendations and top trash hotspots
-
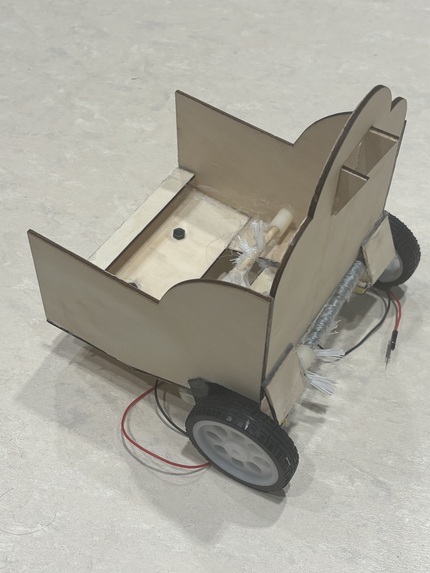
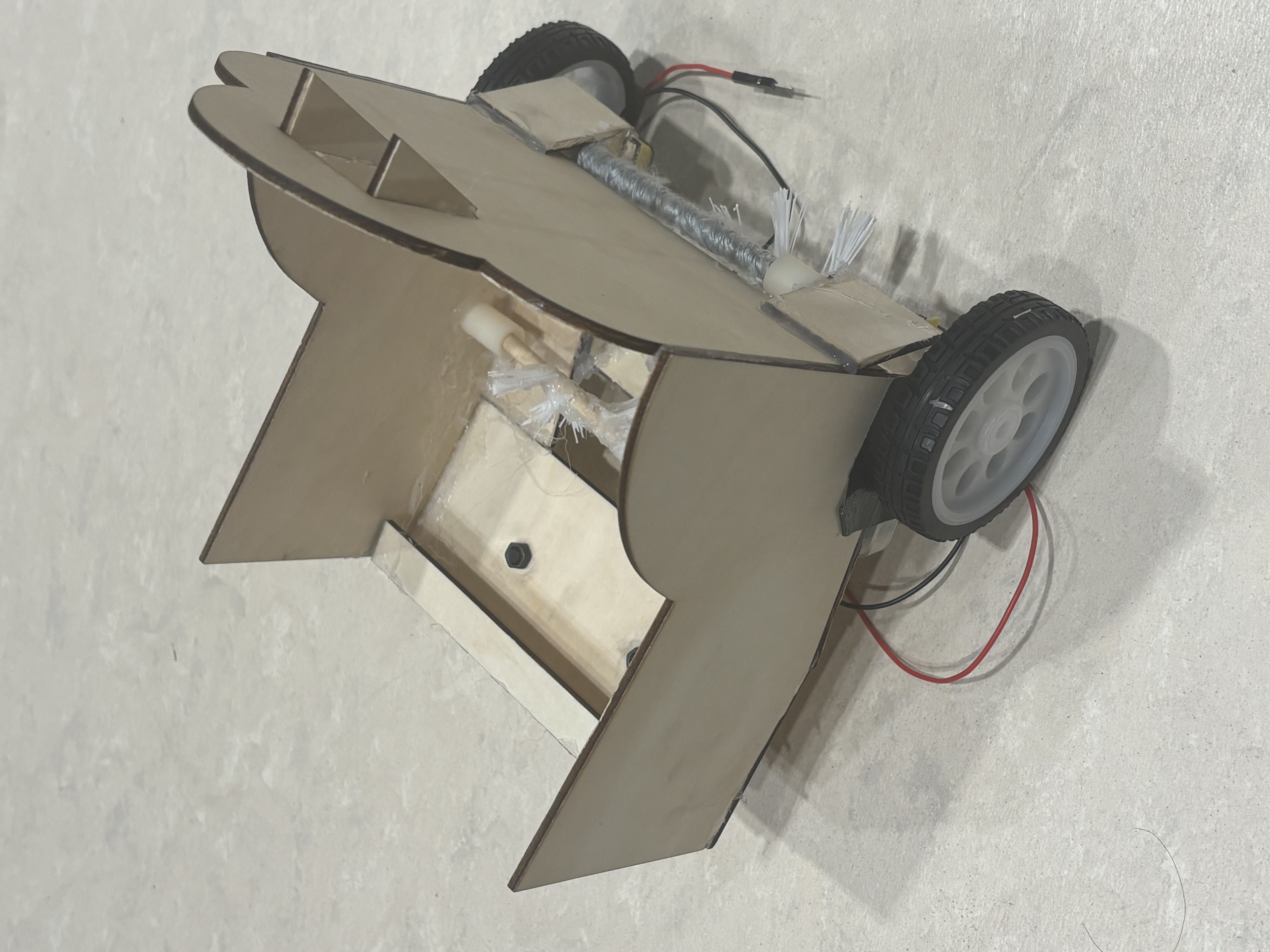
Robot prototype
Why We Built This
Urban waste management is a growing challenge in cities worldwide, and a glance around us reveals its relevance in downtown Toronto. In fact, at our current rate of disposal, which exceeds 400,000 tonnes per year, the city projects that the Green Lane Landfill has approximately 10 years remaining before it reaches capacity. In recognition of this urgency, we also realized that traditional cleanup efforts are reactive and inefficient - by the time trash is reported and cleaned up, it has already caused environmental damage and community health risks. Moreover, improper waste sorting by individuals leads to contamination of recycling streams, with current contamination rates reaching as high as 27-29%. Thus, we drew inspiration from the beloved Pixar movie, Wall-E, by building a robot that transforms waste management from reactive to proactive. This is achieved by creating an autonomous system that detects, classifies, and maps trash in real-time, enabling immediate community response while ensuring proper waste categorization.
What Wall-E Does
Wall-E is an end-to-end trash detection and management platform consisting of three integrated components:
- Physical Robot Component
- Vision System (YOLO v8): A real-time computer vision system that combines YOLO object detection with Google Gemini AI for intelligent trash identification
- Cloud Backend (aiBackend.py): A Flask-based API server that orchestrates AI analysis and data management.
- Interactive Dashboard (webapp.html): A responsive web interface for visualization and action, including a live map with trash detection markers powered by Leaflet.js, AI-generated insights panel showing patterns and recommendations, real-time statistics (total items found, recyclable count, locations), and more.
Technical Stack
Computer Vision & AI:
- YOLOv8 - Real-time object detection
- Google Gemini 2.0 Flash - Vision analysis and natural language insights
- OpenCV - Image processing and manipulation
- NumPy - Numerical operations Backend:
- Python 3.x
- Flask - Web server framework
- Flask-CORS - Cross-origin resource sharing
- Pillow (PIL) - Image handling
- Requests - HTTP client Frontend:
- HTML5/CSS3/JavaScript
- Leaflet.js - Interactive mapping
- Leaflet.heat - Heatmap visualization
- Modern CSS (gradients, glassmorphism, animations)
- Responsive design for mobile and desktop Data & Storage:
- JSON file-based database for detections
- Local image storage with organized directory structure
- RESTful API architecture
How It Works
- Detection: Camera/robot captures images of the environment
- Local Processing: YOLO quickly identifies if objects are present
- Cloud Analysis: Promising frames are uploaded to the backend
- AI Classification: Gemini Vision analyzes the image and identifies specific trash items, materials, and disposal categories
- Storage: Detection data (with GPS, timestamp, image, AI results) is saved
- Visualization: Dashboard displays new detections on the map with detailed information
- Insights: Gemini analyzes patterns across all detections to provide strategic cleanup recommendations
- Action: Users can navigate to locations and mark them as cleaned
Challenges We Faced
- Integrating Gemini API for the First Time None of us had worked with Google’s Gemini Vision API before. Getting it to process image data correctly was harder than expected — especially when dealing with file size limits, authentication issues, and JSON parsing.
- Connecting the Camera Feed to the Cloud Creating a seamless pipeline from local video feeds to cloud processing required balancing speed, accuracy, and reliability.
- Managing Latency and Real-Time Constraints Gemini’s analysis can take several seconds, which doesn’t pair well with a 30+ FPS video stream. Early tests quickly overloaded our backend.
- Environment Variables and API Keys A surprisingly tricky issue came from environment variable persistence. Our API keys worked in one terminal but disappeared when launching scripts elsewhere. We eventually hardcoded them for testing (with a big note to externalize them for production). It’s not perfect, but for a hackathon prototype, it was a practical solution that let us keep moving.
Real-World Impact
Wall-E helps cities and organizations move from cleanup to prevention. By automating trash detection and classification, we can accelerate cleanup response times, reduce recycling contamination, empower data-driven waste policies, and engage communities through transparency and technology.
Future enhancements
- Building and deploying robots for real-world testing
- Database migration from JSON to scalable cloud storage (e.g., MongoDB, PostgreSQL)
- More extensive predictive modeling to forecast where trash is likely to appear
- Community engagement tools (leaderboards, verified cleanups, volunteer impact tracking)
- Municipal integration with local waste management APIs for automated coordination






Log in or sign up for Devpost to join the conversation.