-
Assembly
Inspiration
My initial idea was to build a rover that delivers you a cup of chocolate milk over your messy table going over obstacles. I did make one however, the wheels were not ideal for going over obstacles and running on random terrains. I've had my goal of making this almost creepy looking walking robot that walks like a spider. I could not have done this until today if it was not my best passionate teammates. Jason is this smarty software pants that could set up the platform for all kinds of commands. Jack is this super driven mechtornics engineering student who is keen on hardware and hands on mechanical engineering. And I love the creativity, designing and hands on mechanical buildings. This was a perfect environment to have this dream come true.
What it does
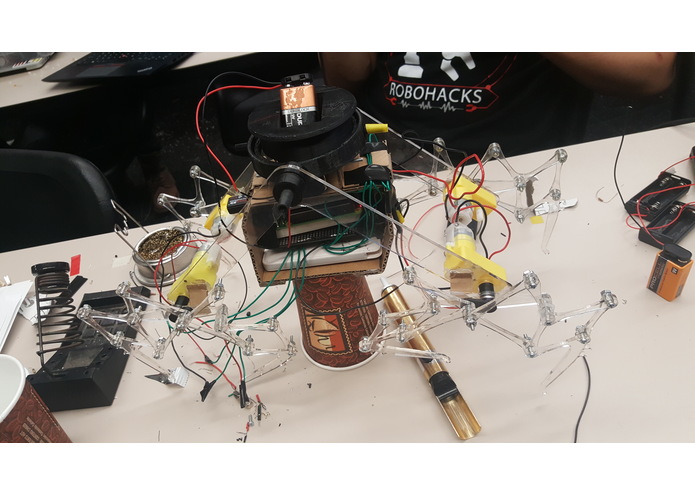
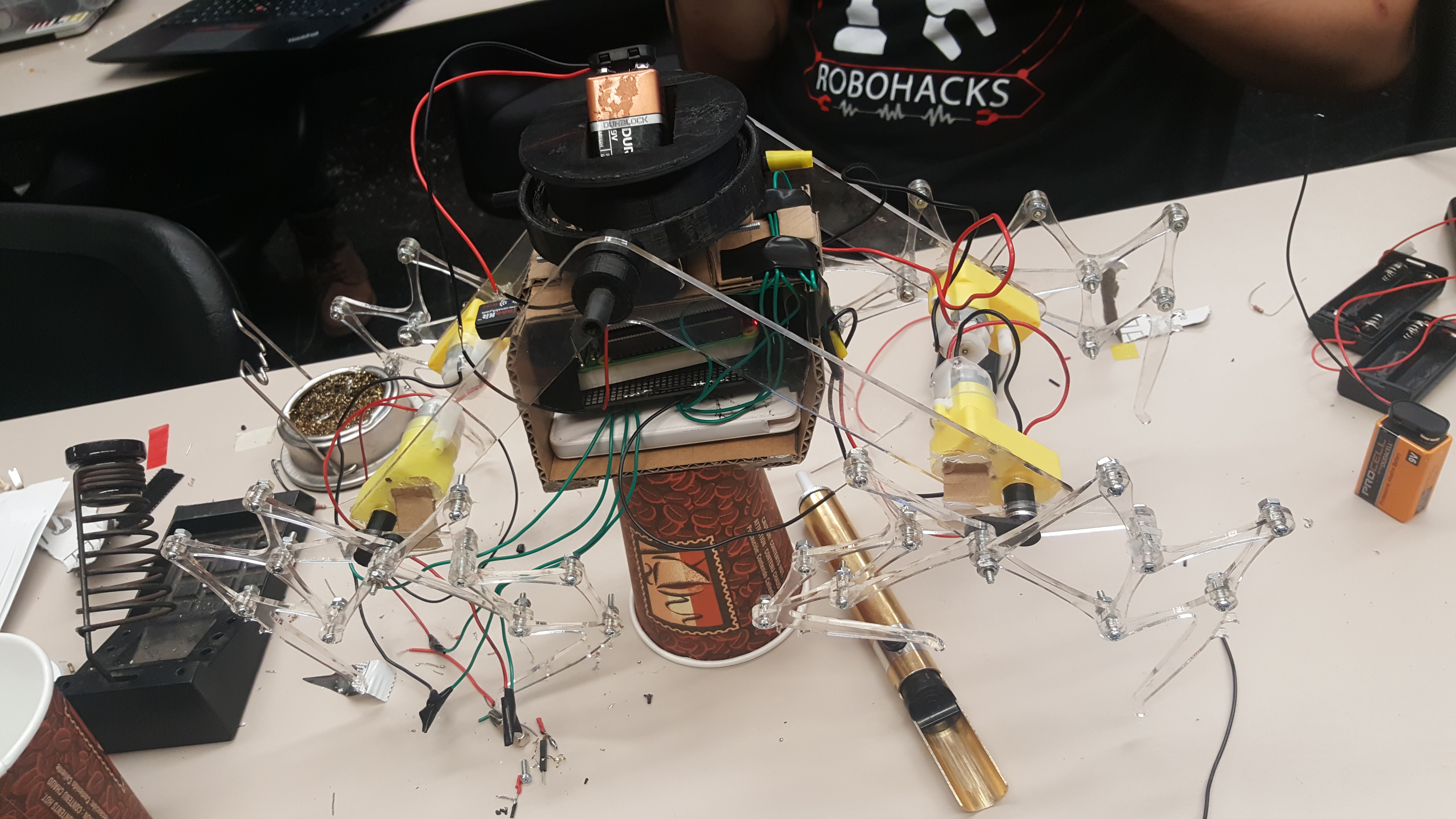
It walks like an insect, perhaps a spider and levels the center body on a constant horizonetal angle via gimbal rings.
How we built it
With the 3d cadded the parts, we laser cut all the leg links. Joints were out of bolts and nuts. We 3d printed custom motor housing and 2 axis gimbal rings for balancing. R pi for software, proto board and soldering for hardware connections.
Challenges we ran into
Too many mechanical joints. Assembling the joints smooth was a challenge. Acrylic board for the main legs are too thin so the entire structure is flimsy. R pi was over heating but could not find an alternative early enough.
Accomplishments that we're proud of
Having a complete built robot with a working mechanism. Having a working control platform.
What we learned
We learned that sometimes it is important to take a step back, rest, and evaluate the problem we are currently solving and analyze the alternatives in terms of both their potential effectiveness and the amount of time that each alternative will take.
What's next for WALKY DORKY
Have more stable mechanical system and more robust power to deliver enough torque to legitimately go over obstacles.
Built With
- 3dprinting
- carboard-box
- laser-cut
- proto-board
- raspberry-pi
- tape
Log in or sign up for Devpost to join the conversation.