-

the dream
-
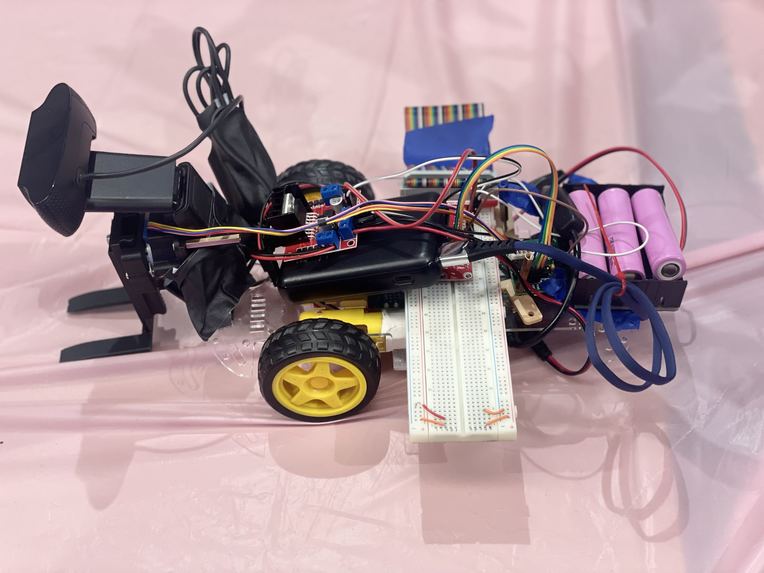
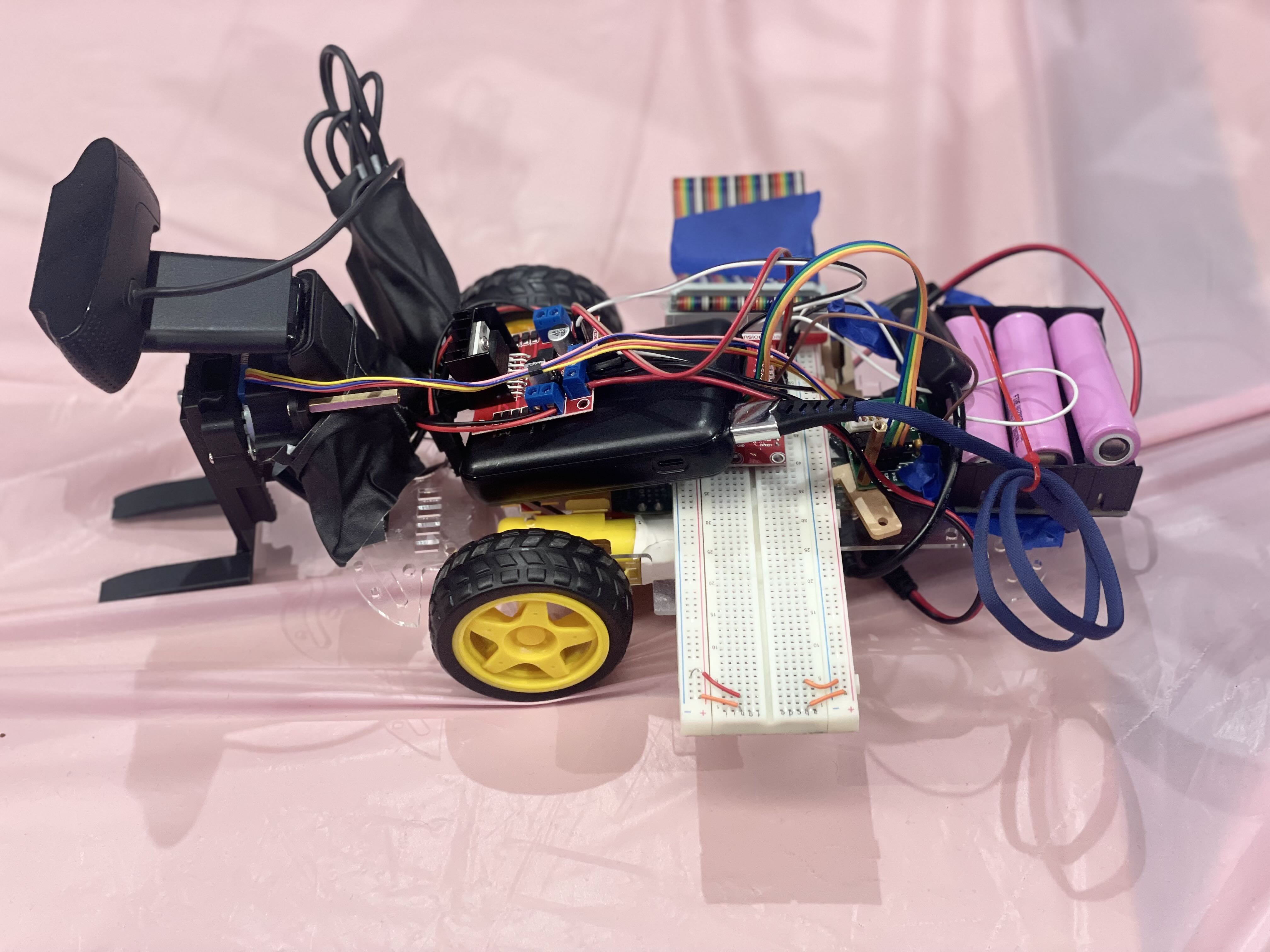
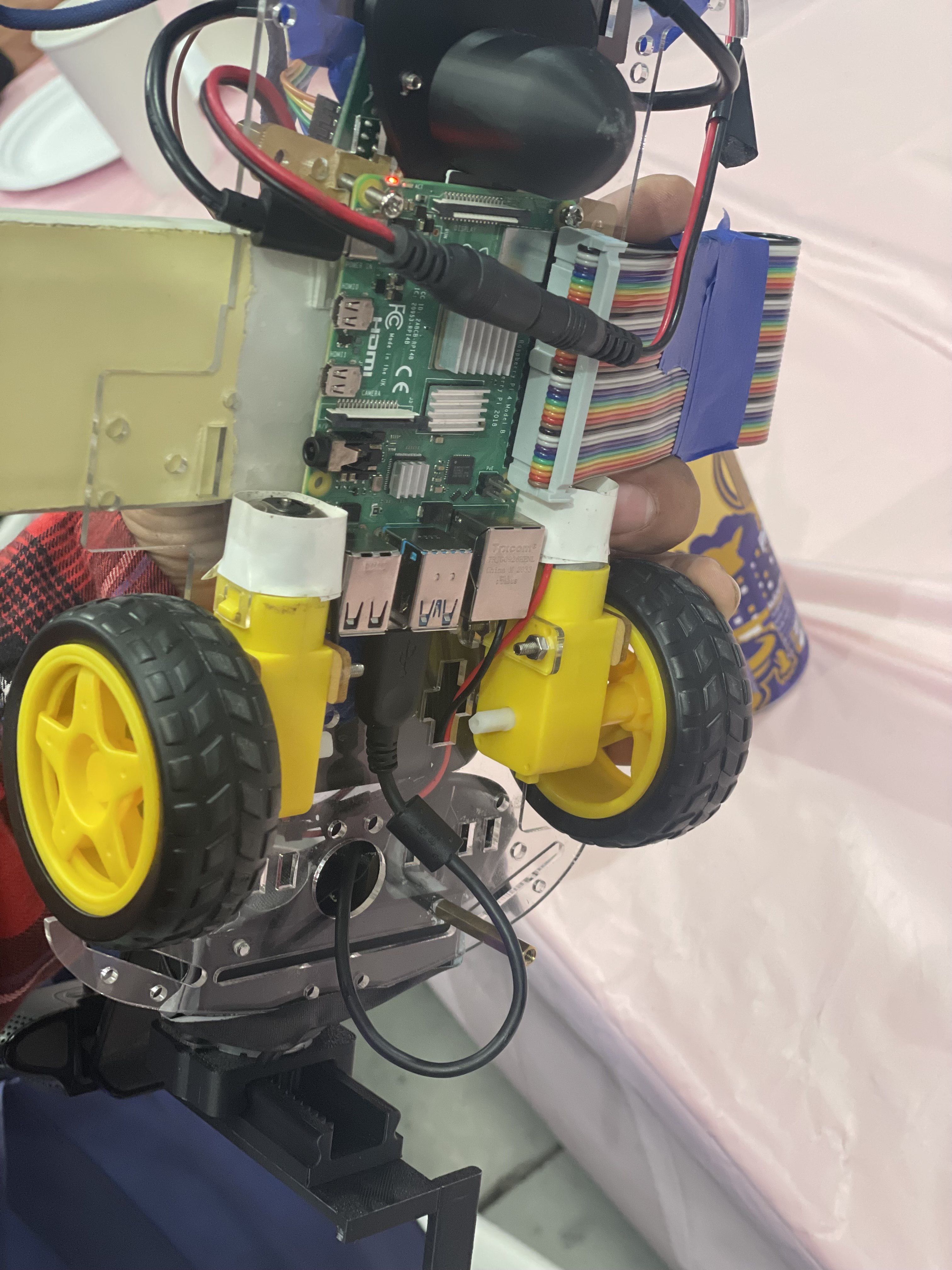
the hardware is hard
-
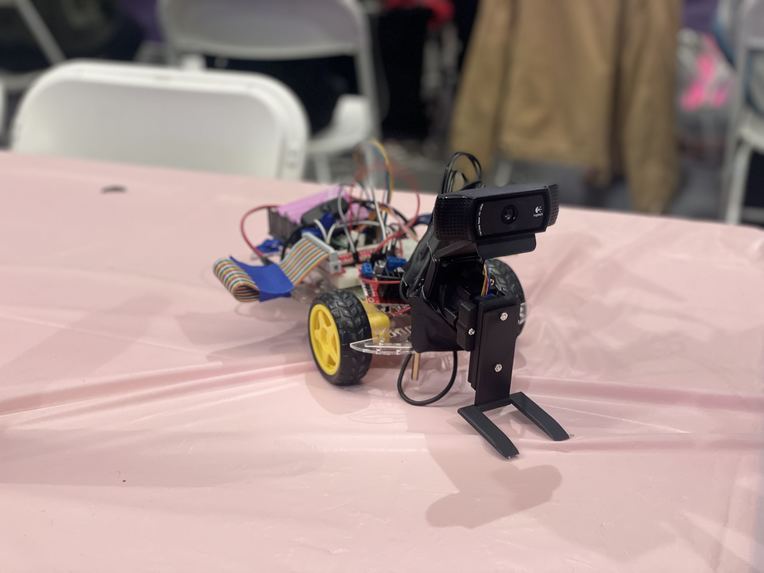
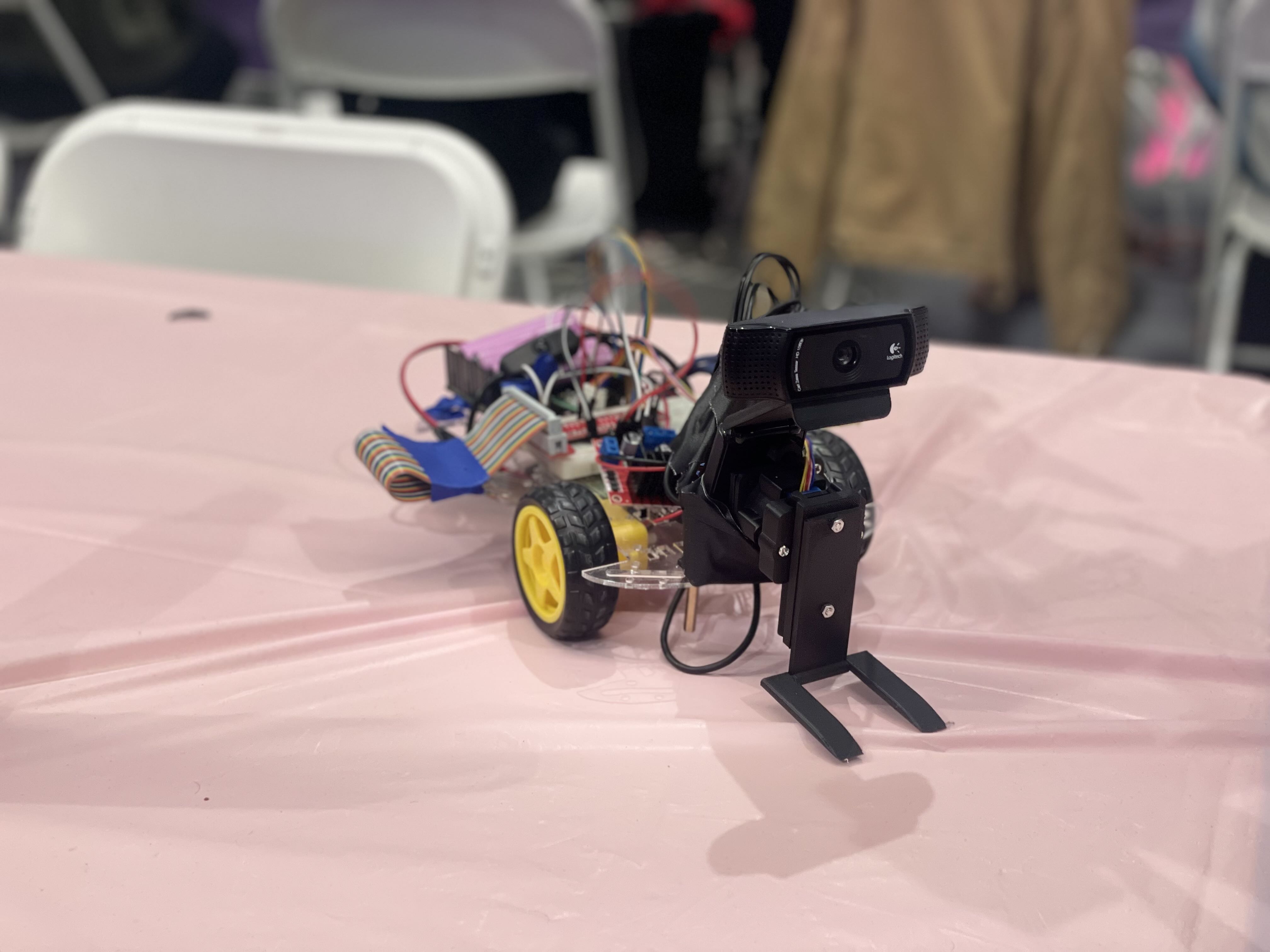
the accomplishment
-
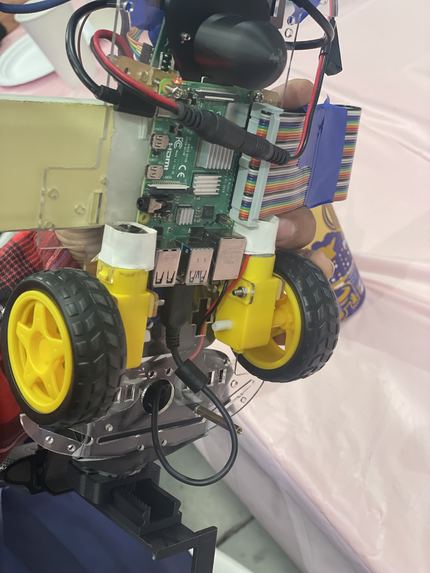
not its best angle lol

Inspiration
VR_OM_Lift was born out of a desire to improve operator safety and accessibility. I wanted to create a system where someone recovering from injury — or living with physical limitations — could still control industrial equipment remotely, like from home.
As president of BitBots (our hardware club) and VP of the 3D printing team, I’ve helped others build. But this time, I wanted to test myself — solo — across electronics, embedded software, Unity, and VR integration.
The concept worked beautifully… until our university Wi-Fi tried to stop me from using my own Quest headset. Lesson learned: security policies are the true final boss.
What it does
VR_OM_Lift is a remote-controlled forklift powered by a Raspberry Pi, driven via VR input using a Meta Quest headset. It receives directional and lift commands via sockets and streams live camera footage to the operator in real time.
The system also supports a fallback PC controller for debugging or non-VR use.
How we built it
This prototype includes:
A Raspberry Pi motor server (DC + stepper motor control)
A USB camera with MJPEG streaming
A Unity app using OpenXR to map VR controls to JSON
A Python GUI controller for keyboard control
A full custom circuit using L298N + ULN2003 motor drivers
Custom 3D-printed parts (with more in progress)
The code, rig, and wiring were built from scratch during the hackathon.
Challenges we ran into
Getting Unity + Meta Quest + OpenXR input mappings to work
Raspberry Pi GPIO signal timing and stepper motor limits
School Wi-Fi completely blocking local device communication :'(
Manually setting USB camera paths when they change at boot
Accomplishments that we're proud of
Building a full robotic system from hardware to VR interface in a weekend
Creating a stable motor control + safety system with lift limits
Implementing real-time video streaming with fallback control
Testing everything independently with working demos and GUI
What we learned
Unity + XR bindings are way more nuanced than expected
The Raspberry Pi GPIO is powerful, but timing matters
Having both VR and non-VR control paths is a lifesaver during debugging
Good documentation + bash scripts = less 2AM troubleshooting
What's next for VR_OM_Lift
Re-integrating VR now that we’ve learned how to dodge Wi-Fi blockers
Adding stereo cameras for depth and better visibility
Integrating a HUD inside Unity with a live video feed
Building a full-size (or at least bigger) warehouse telepresence robo
Built With
- freesimplegui
- git
- l298n
- mjpeg
- openxr
- pigpio
- python
- quest
- raspberry-pi
- raspberrypi
- uln2003
- unity



Log in or sign up for Devpost to join the conversation.