-
-

The Body: Building the Physical Twin(robot arm using circuits designed by Gemini )
-
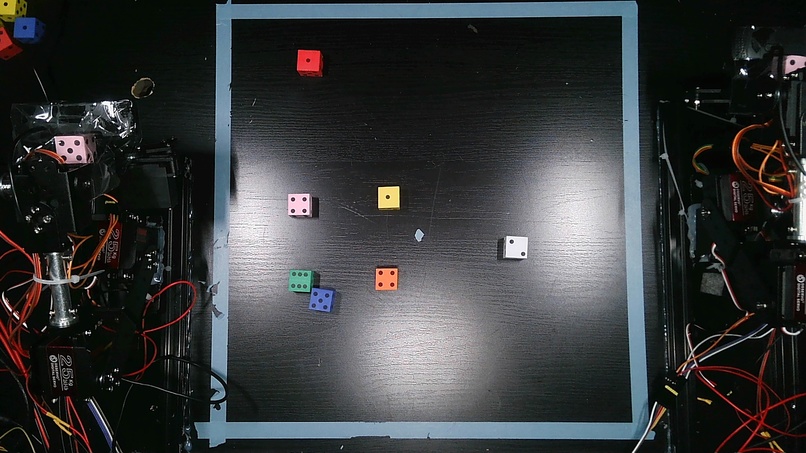
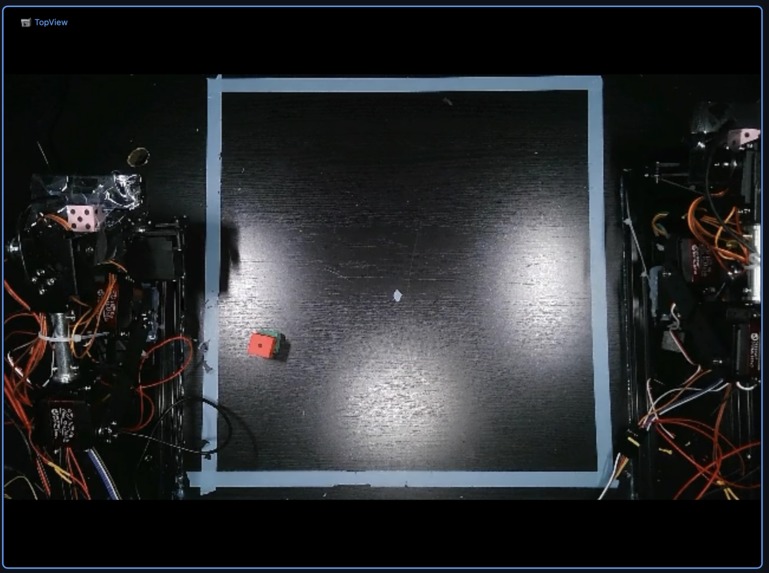
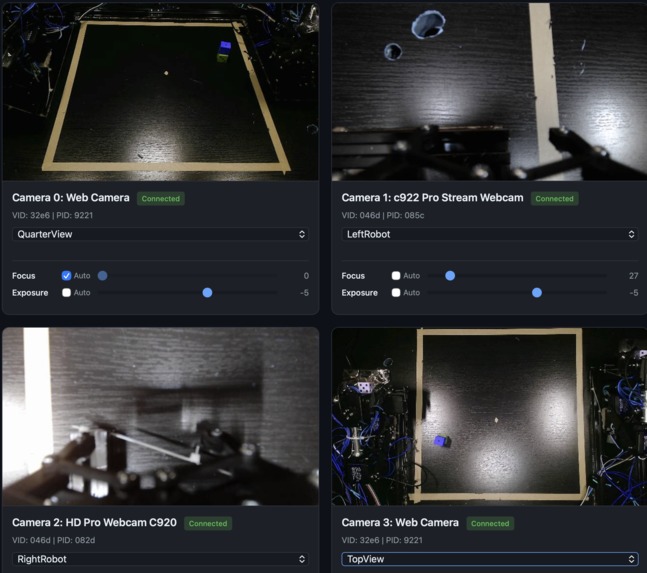
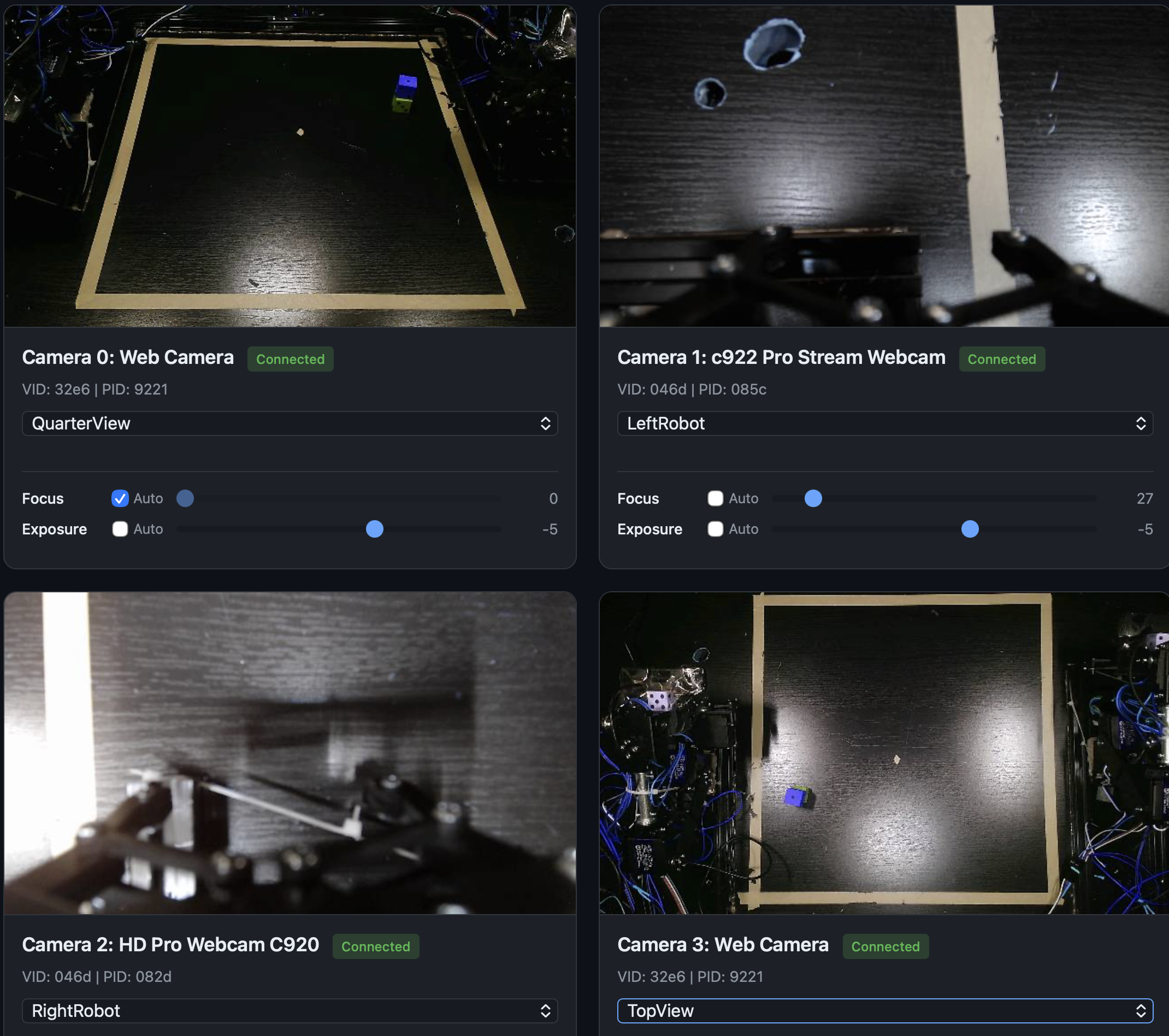
The Eyes: Dual-Camera Input" (Top-down and Angled views are fed into Gemini 3 for spatial depth reasoning.)
-
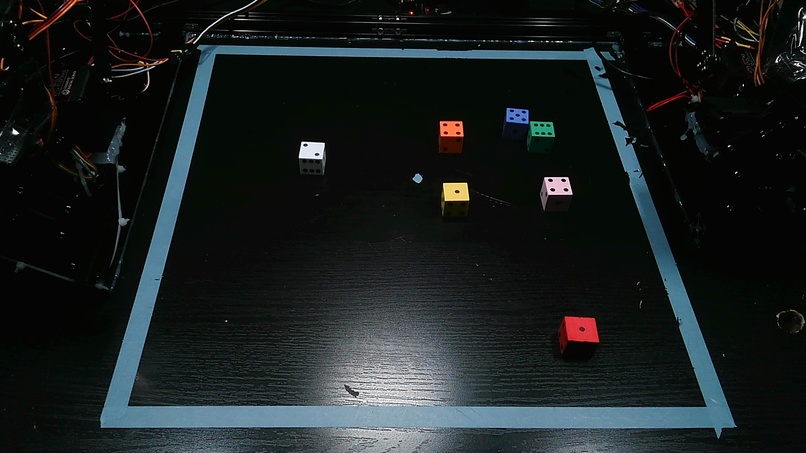
The Eyes: Dual-Camera Input" (Top-down and Angled views are fed into Gemini 3 for spatial depth reasoning.)
-
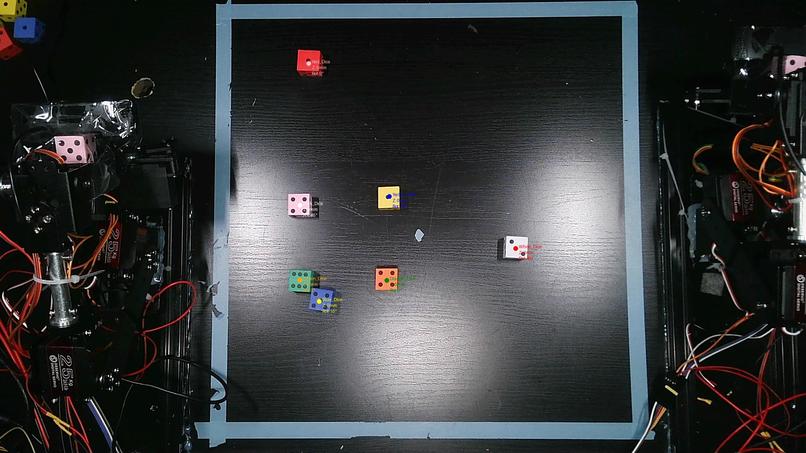
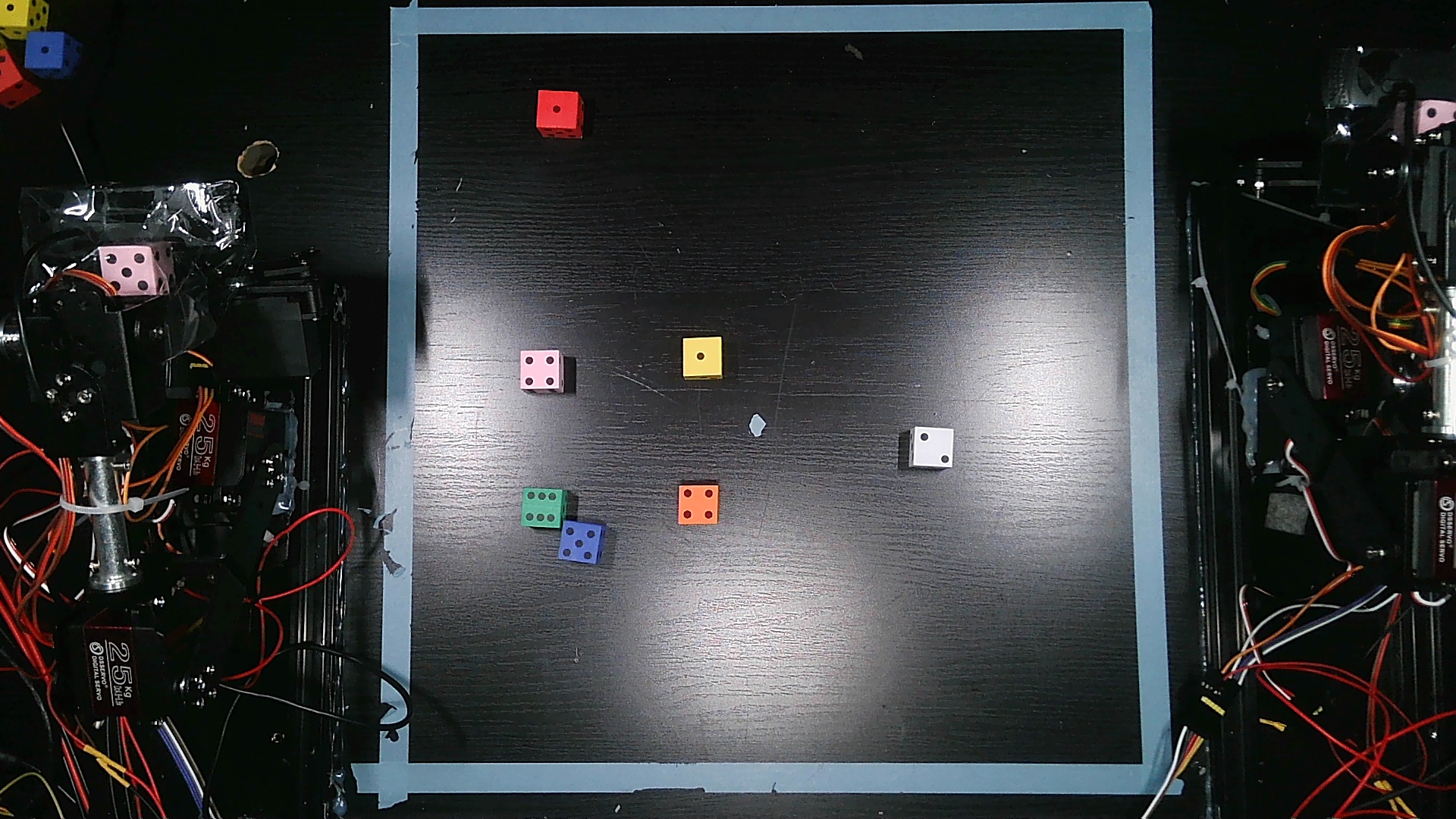
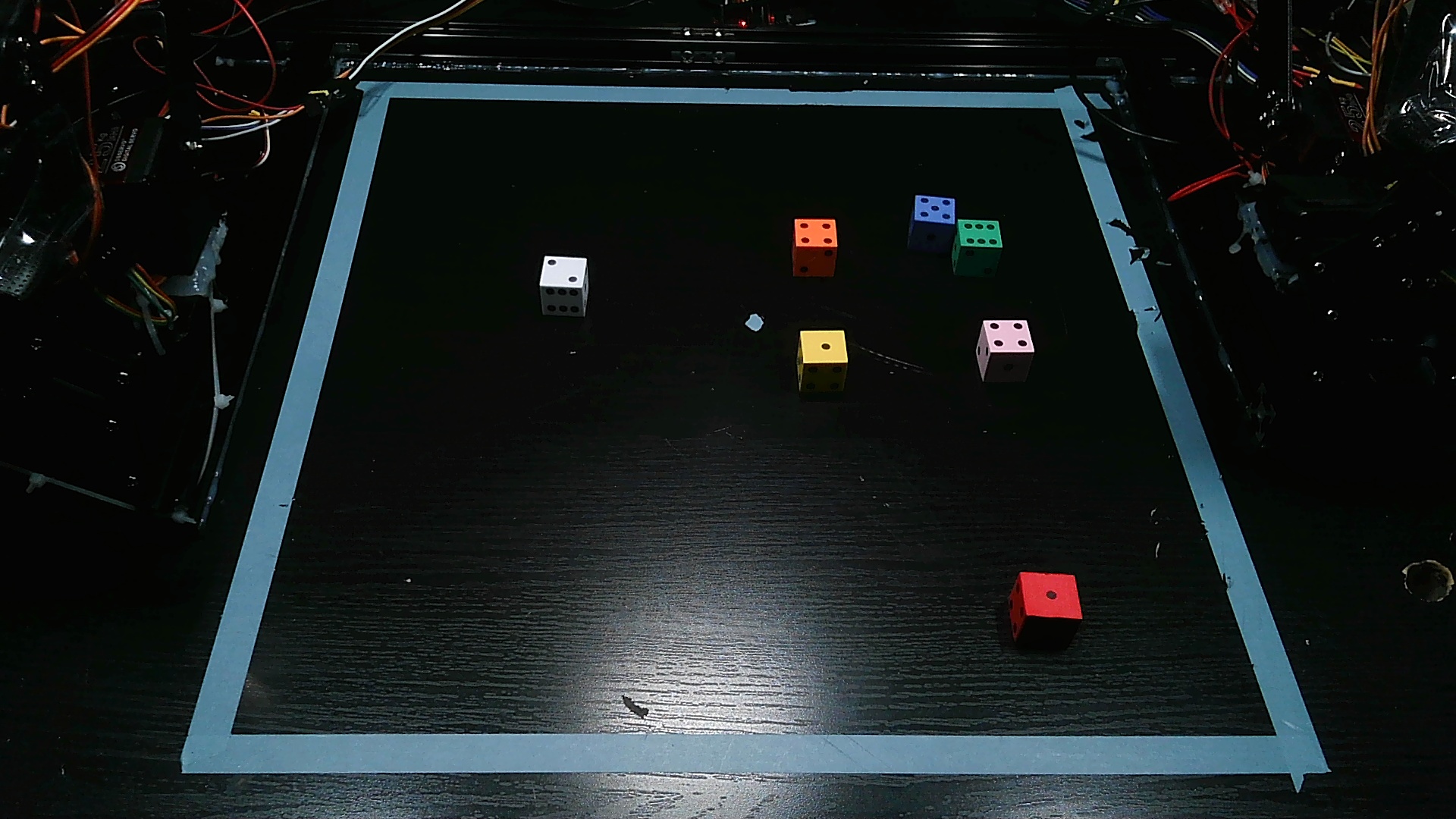
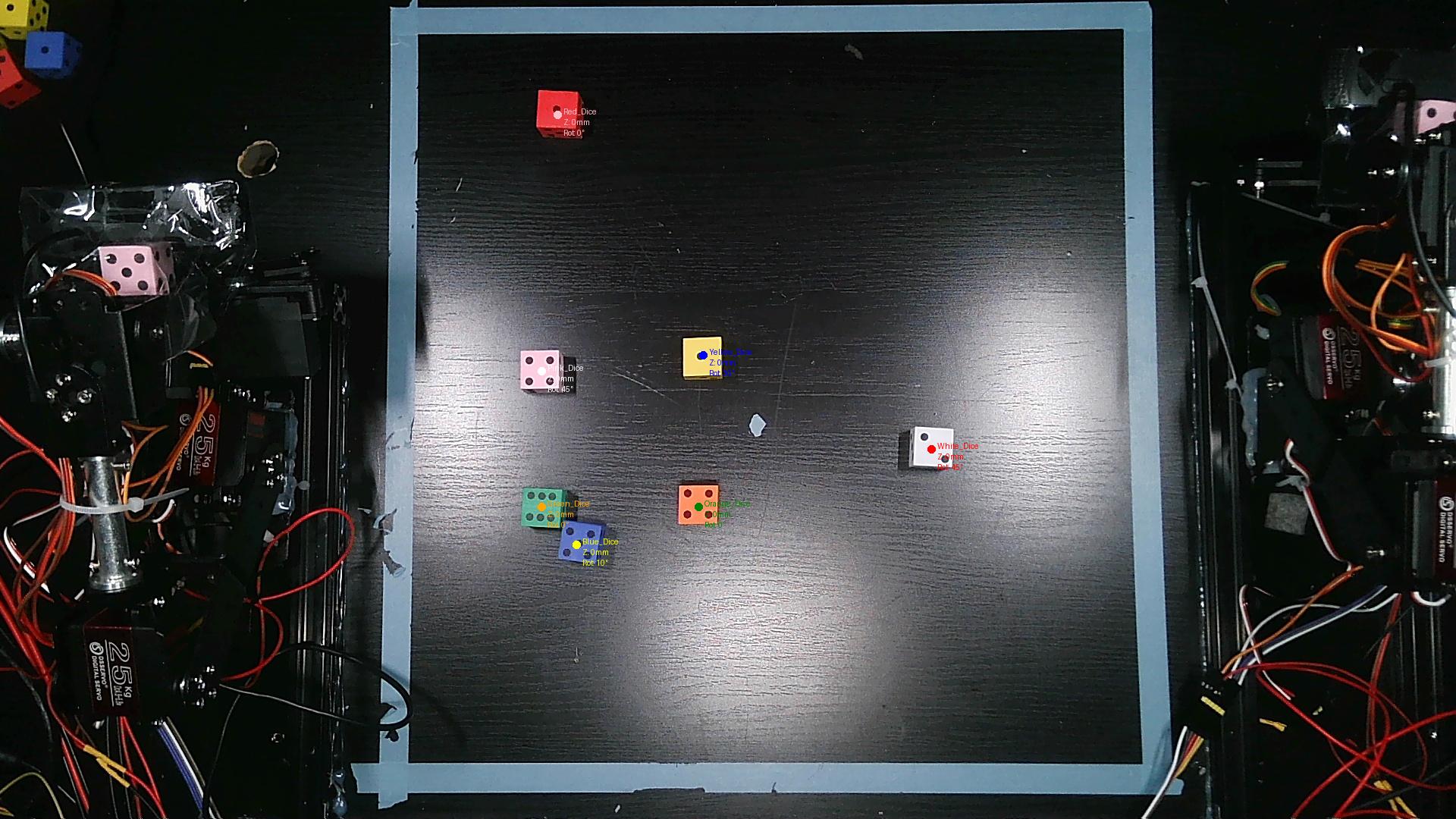
The Brain: Gemini Spatial Analysis" (Gemini identifies objects and calculates precise 3D coordinates from 2D images.)
-
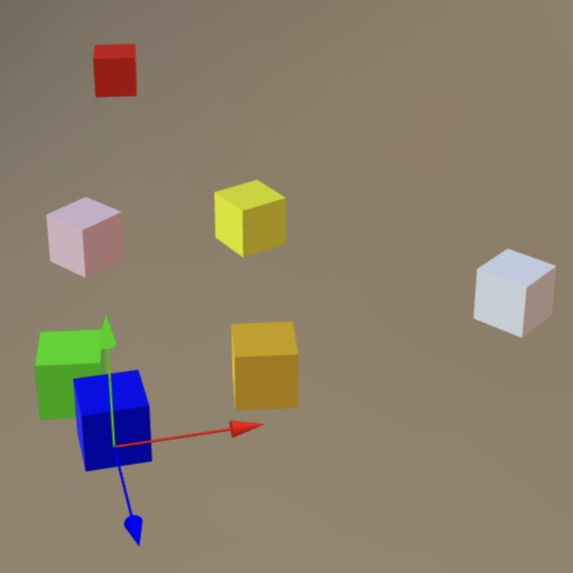
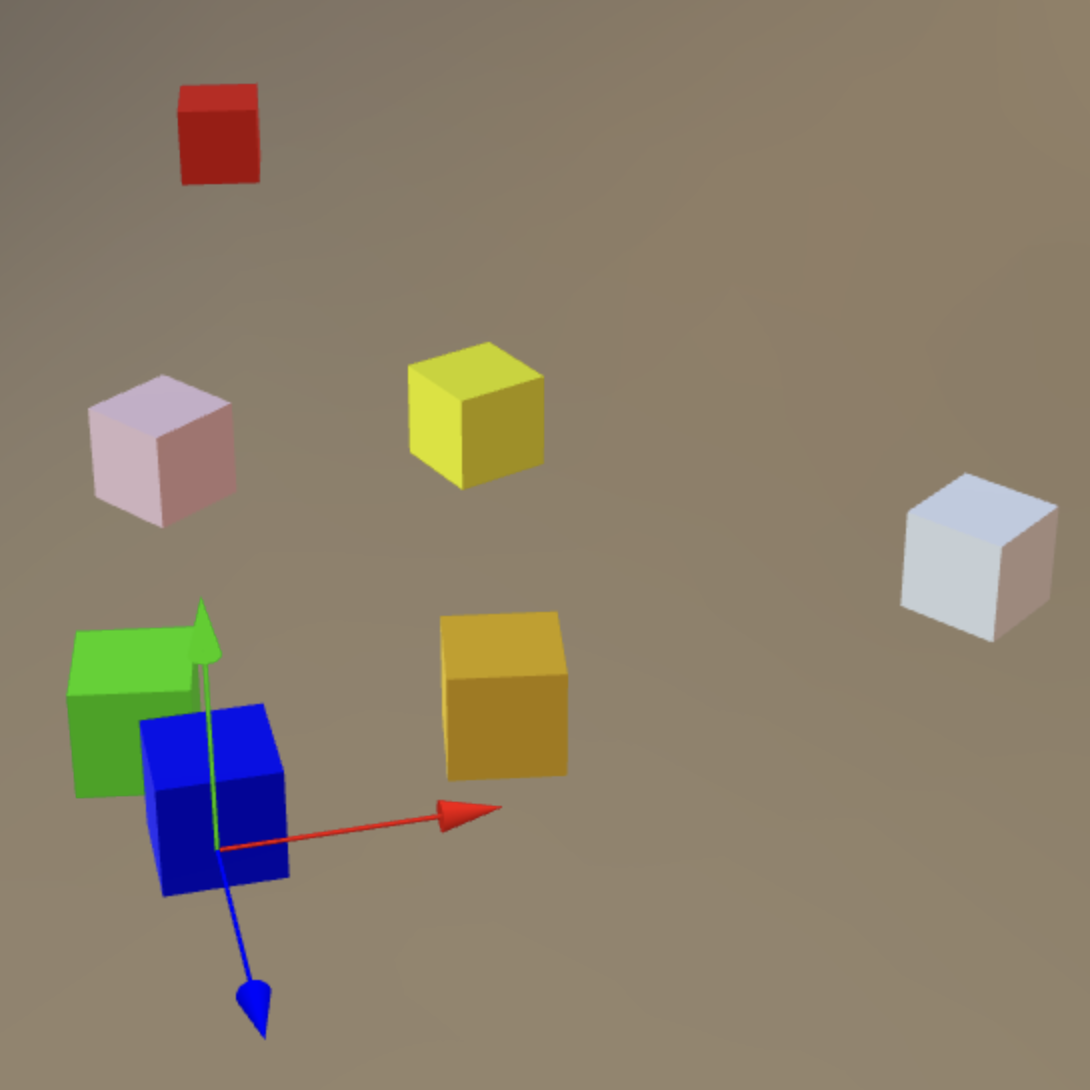
The Twin: Instant VR Generation" (A Virtual Digital Twin is spawned instantly in WebXR based on Gemini's analysis.)
-

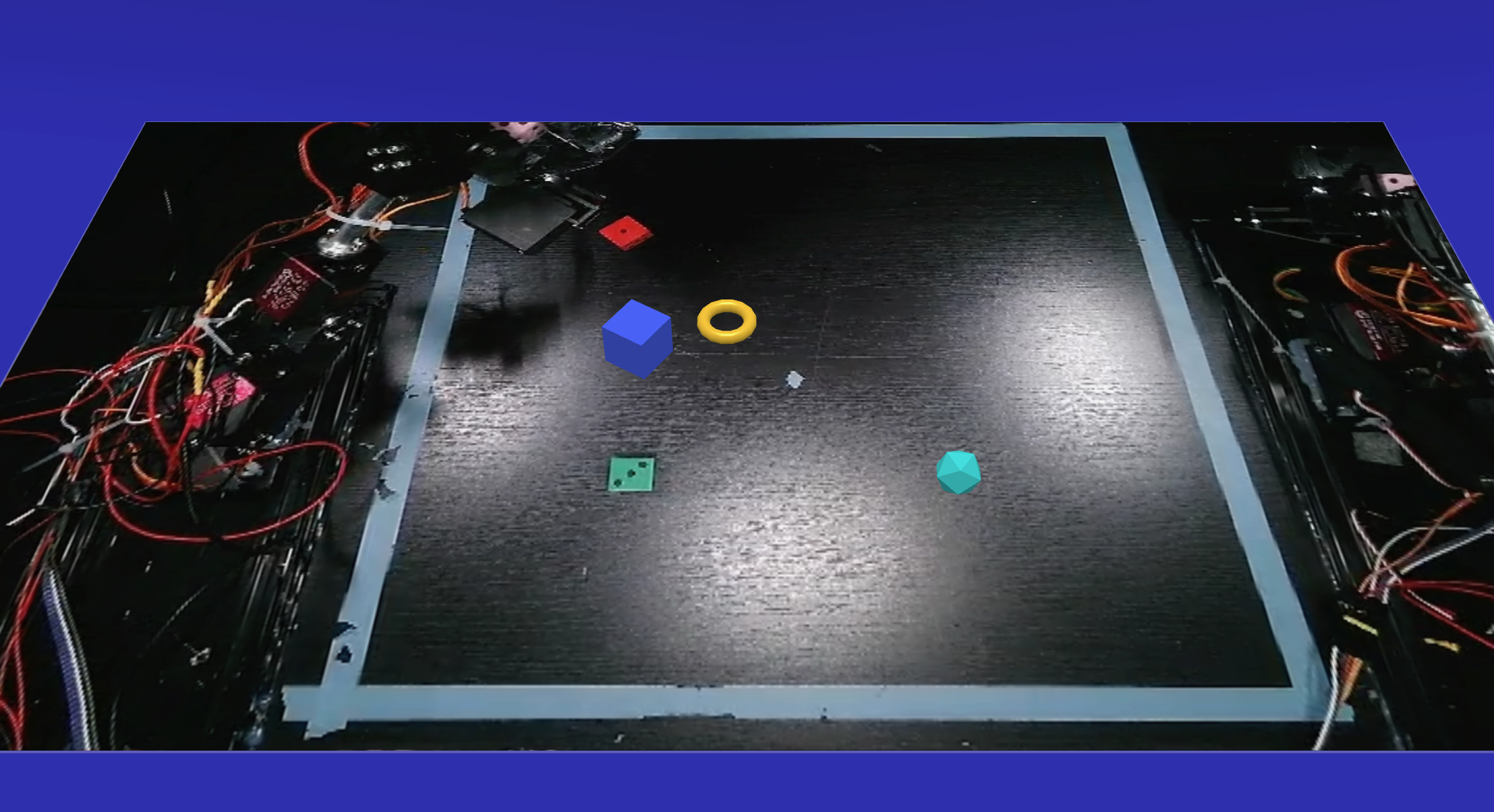
The Interaction: Spatial Manipulation" (User grabs and moves the virtual object in VR using hand tracking.)
-
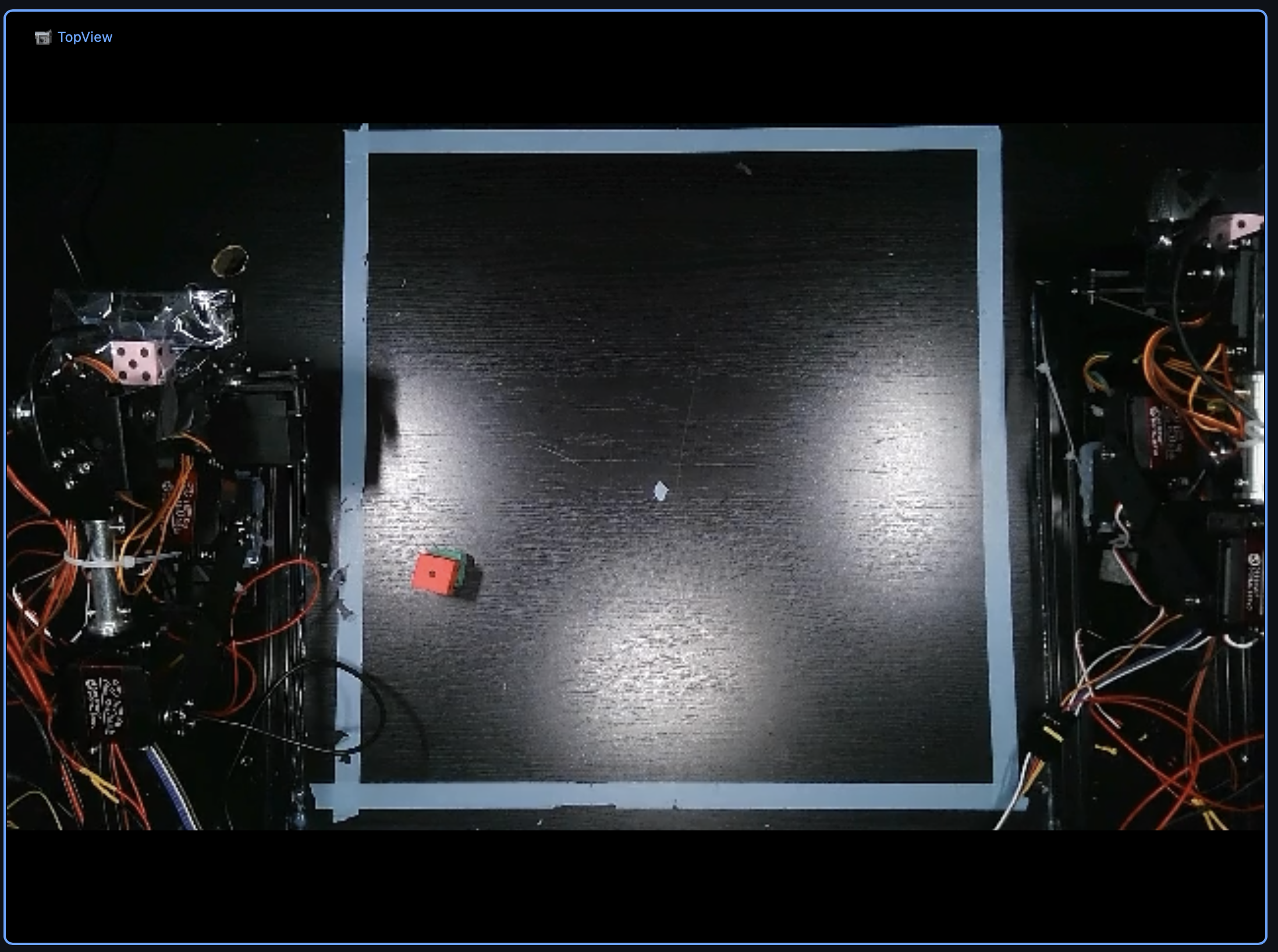
The Motion: Real-World Synchronization" (The physical robot arm moves in perfect sync with the VR user's actions.)
-
The Motion: Real-World Synchronization" (The physical robot arm moves in perfect sync with the VR user's actions.)

Instant Reality combines Gemini 3 and WebXR to redefine robotic control. Users simply "frame" real objects with a VR hand gesture to bridge the physical and digital worlds.
Robotics
- Hardware Design: Leveraged NotebookLM and Gemini to design custom electronic circuits and generate driver code for the robot.
- Physical AI: Utilizes Gemini Robotics-er 1.5 Preview for advanced motion planning.
- Multi-View Perception: Implements a "Master-Reference" dual-camera system to solve spatial depth.
- Precision Control: Gemini Robotics verifies robot movements in real-time, correcting hardware inaccuracies through multimodal visual feedback.
- Webview: Offers a prompt-based interface within VR, enabling direct control via Gemini Robotics.
Digital-Twin
- AI Modeling: Experimenting with Gemini 3 Pro to generate 3D models from 2D camera feeds.
- Reality Interaction: Actions in VR are synced to the real world—moving a virtual object instantly drives the physical robot to replicate the motion.
- This system demonstrates a complete loop: from AI-assisted hardware design to real-time, multimodal robot control.
Built With
- aiohttp
- arduino
- babylonjs
- computer-vision
- google-gemini
- google-genai-sdk
- javascript
- opencv
- pca9685
- python
- react
- robotics
- vite
- webrtc
- websockets
- webxr



Log in or sign up for Devpost to join the conversation.