Inspiration
We were inspired by the lack of voice controlled robotics in industry. Many companies work on robotics, but only humanoid robots. The companies that do work on robotic networks are terrible and as such only one exists. We wanted to test the conceptual idea an theory of an easy to use voice controlled system. Each node in our system is also capable of obstacle avoidance.
How we built it
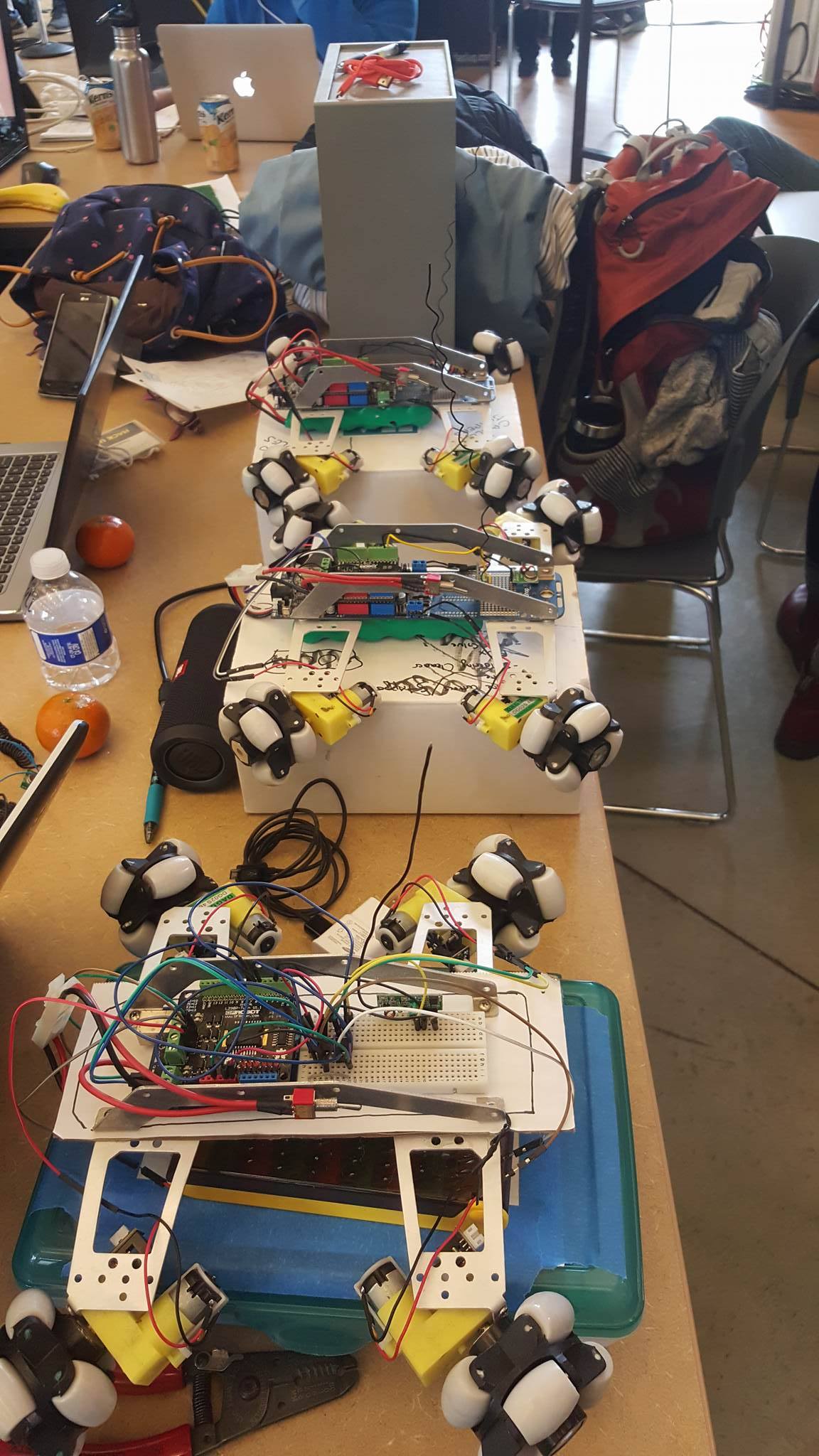
- Built three nodes using Atmega328P microcontrollers, omni-wheels, and other custom hardware
- Programmed speech recognition
- Worked on converting commands to data packets
- Wrote algorithms to wirelessly read data and appropriately follow commands.
Challenges we ran into
Being able to effectively get speech recognition to work without any delay.
Accomplishments that we're proud of
Finishing every task on our list!
What we learned
-Speech recognition from scratch -Building hardware and robotics -Low level AI
What's next for Voice Controlled Robotic Network
-Triangulation -Obstacle avoidance



Log in or sign up for Devpost to join the conversation.