-
-
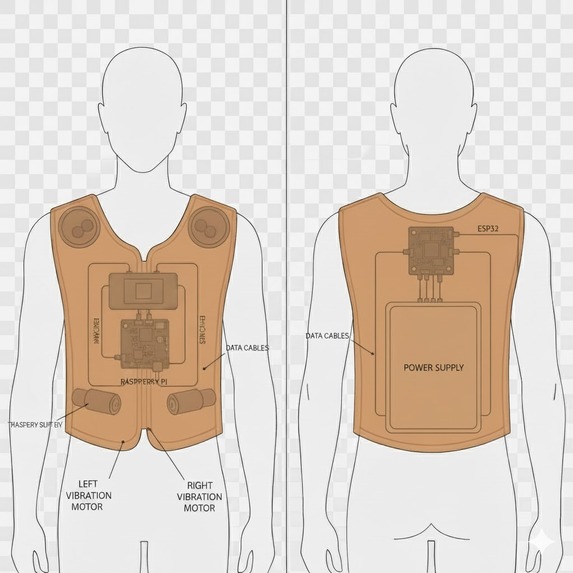
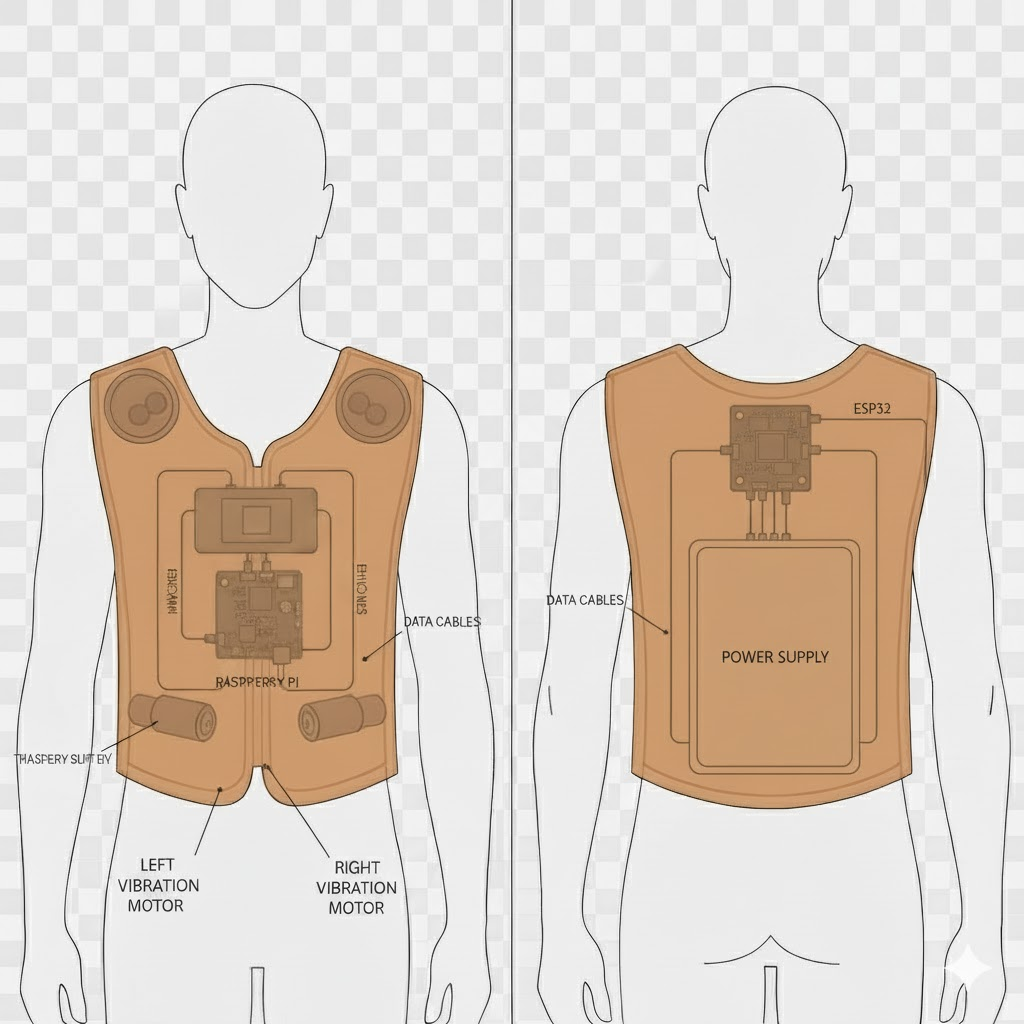
Ideal model for the vest
-
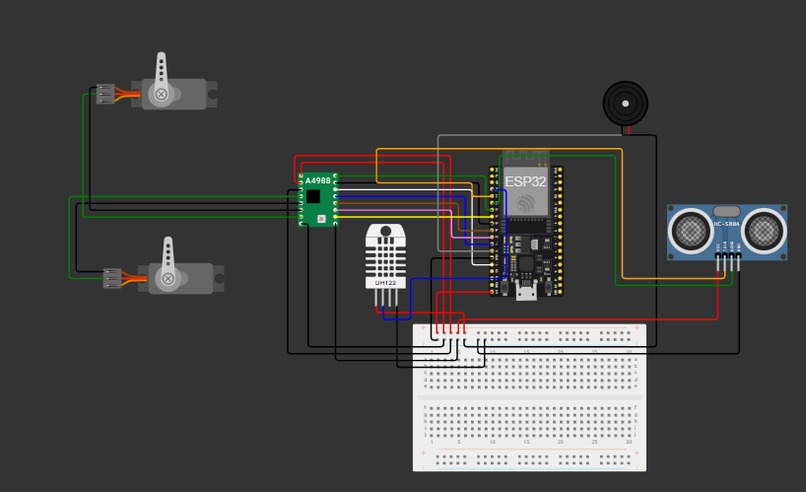
Wiring Diagram
-

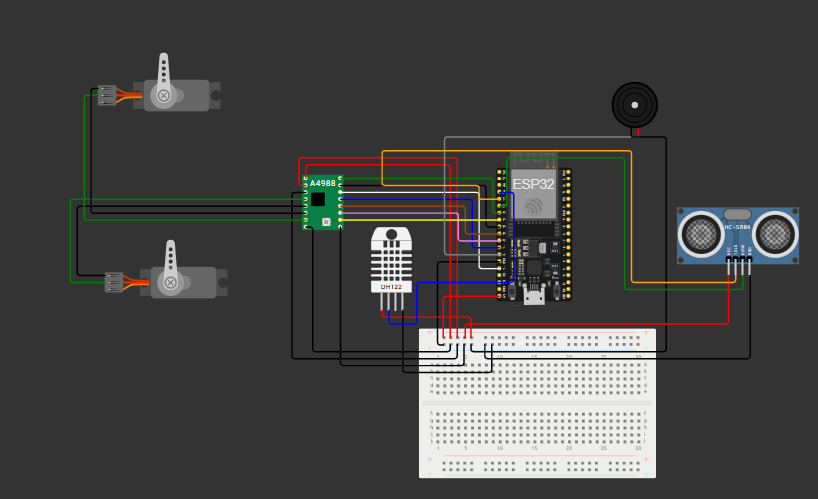
Prototype model for the vest
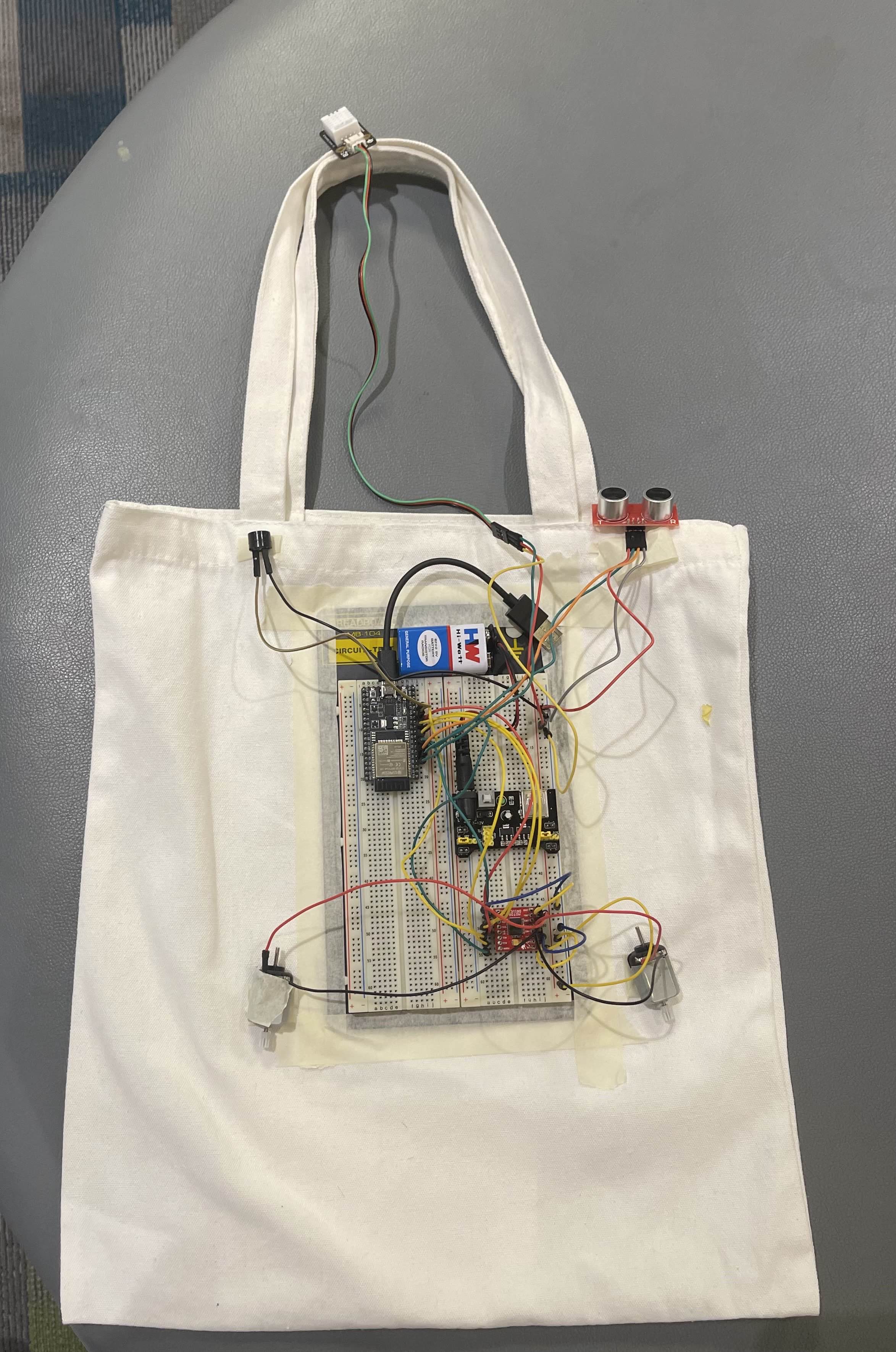
For many people who are visually impaired people, a white cane is the only tool they have to navigate the world. But that cane can only detect obstacles that are close to them but it can't tell them what is coming from right or left or where people are. There are advanced assistive devices with cameras and sensors but they are really expensive, which makes it inaccessible for many people who need them the most. Our plan was to build something affordable and also reliable at the same time. Something that is easy to use.
It detects objects in real time using a camera and ultrasonic sensors. It has direction awareness, so it can detect which direction the obstacle is and then warn the user about the obstacle using a physical feedback through a small motor.
we used esp32 microcontroller, arduino ide, ultrsonic sensors, temperature sensors and dc motors for hardware. we used html, css, javascript for the web interface. flask with python for the backend.
we had problems with raspberry pi bootloader, bad wire attachment for motors, flask was new to us so we had problems setting up that.
we are proud that the protype worked the way we wanted. all the sensors and the motors were functioning properly.
we learned alot of web development, vibe coding and also flask.
our next idea for vision mate is to use an actual vest. solder the wires instead of using a multimeter and print a custom pcb for efficient space.

Log in or sign up for Devpost to join the conversation.