-
-
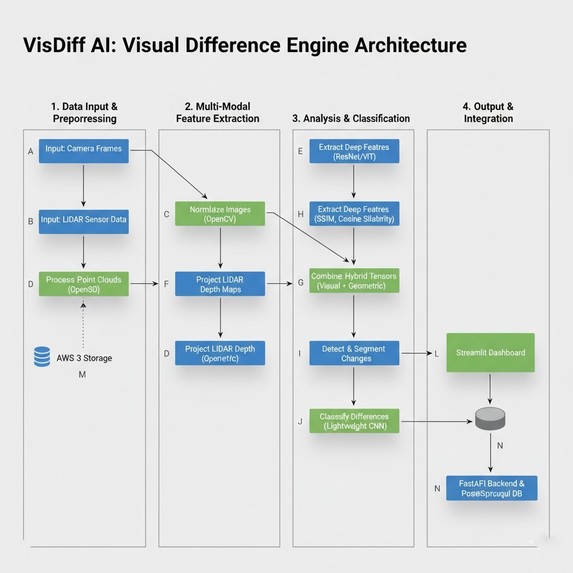
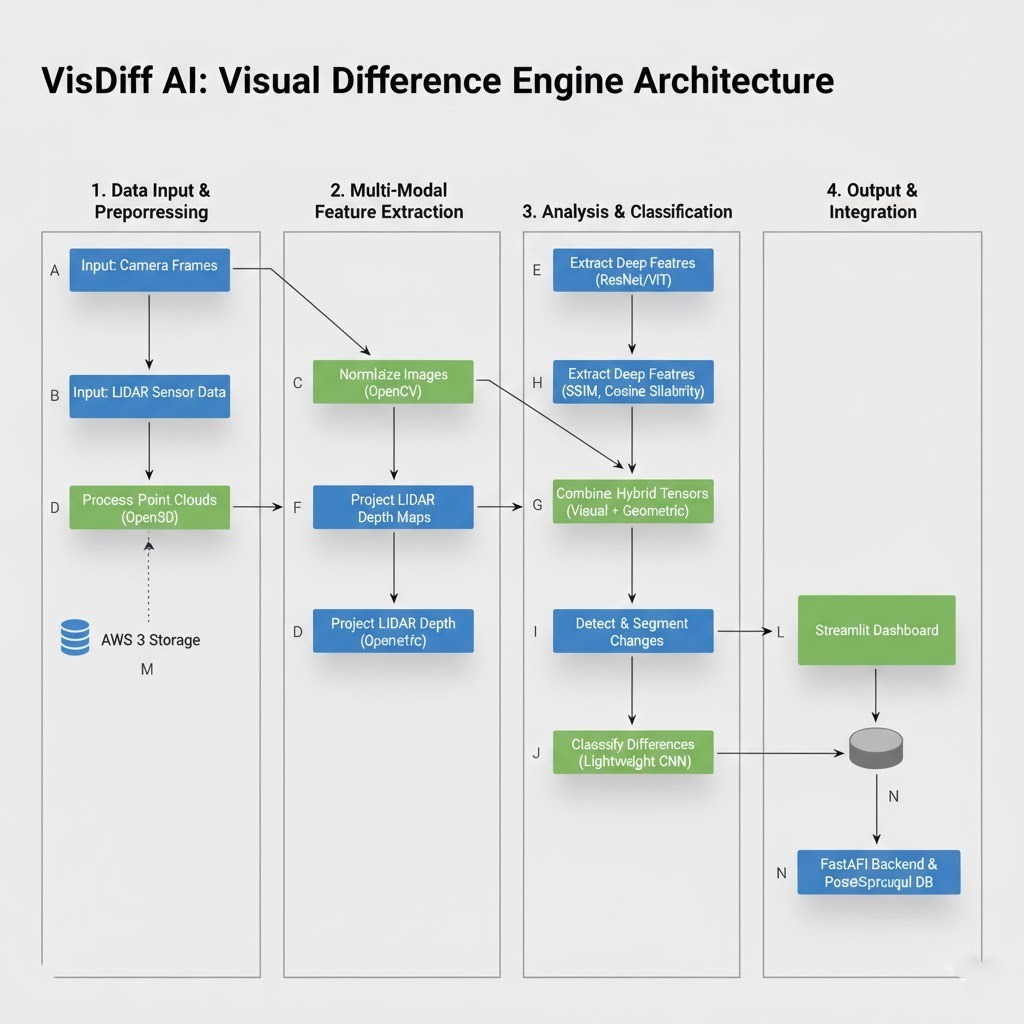
simple explanation of solution using flow chat
-
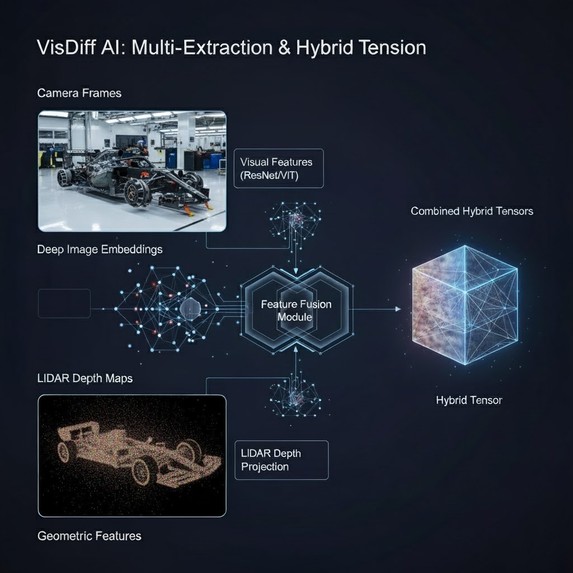
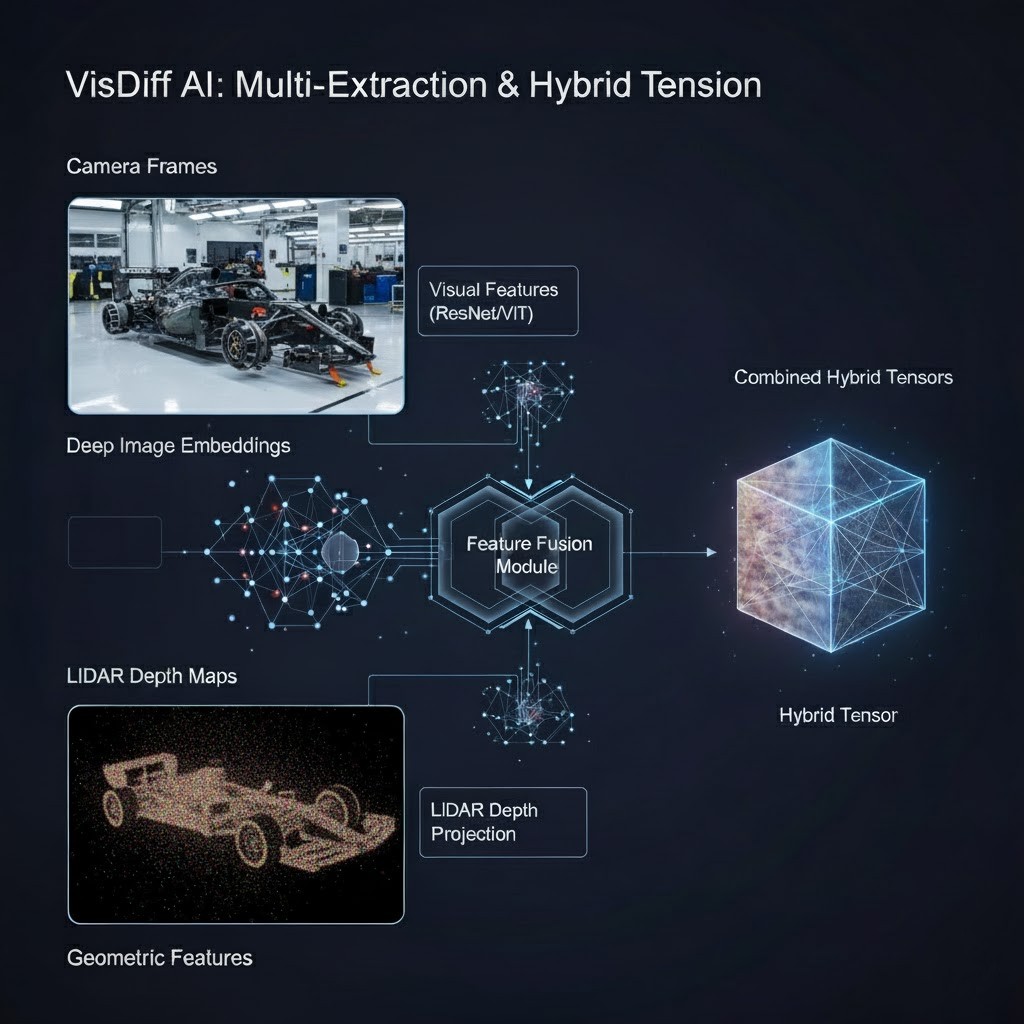
fusion model
-
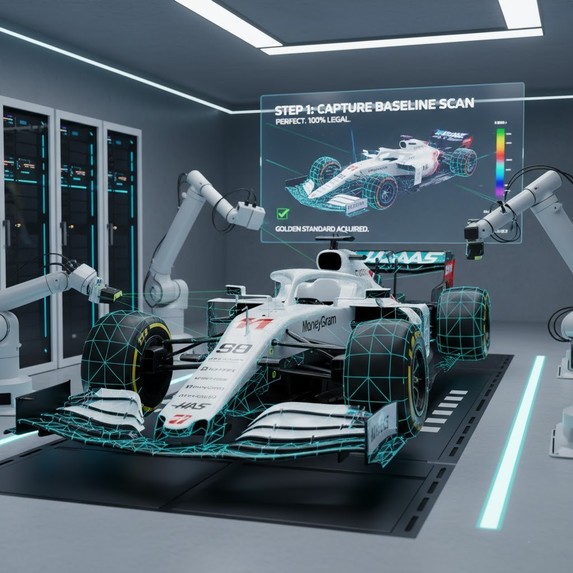
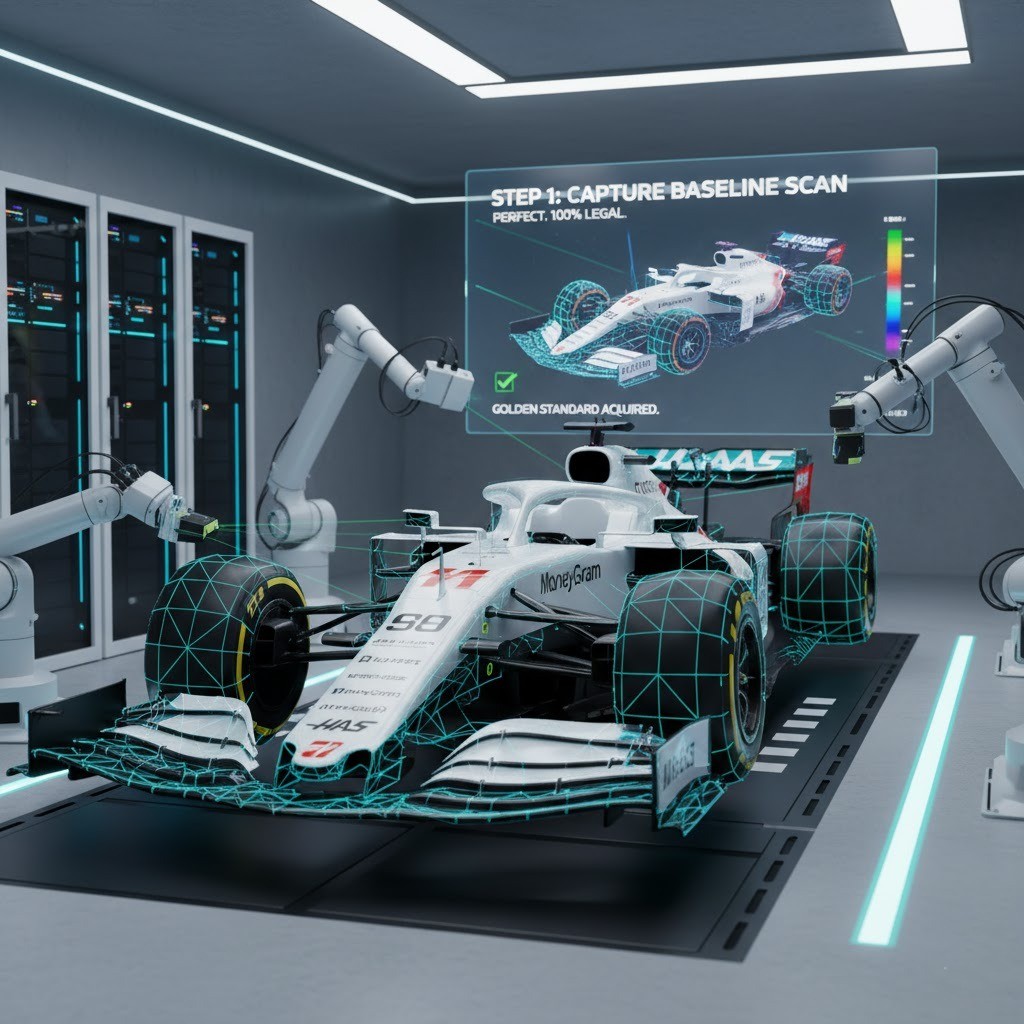
LiDAR step 1
-
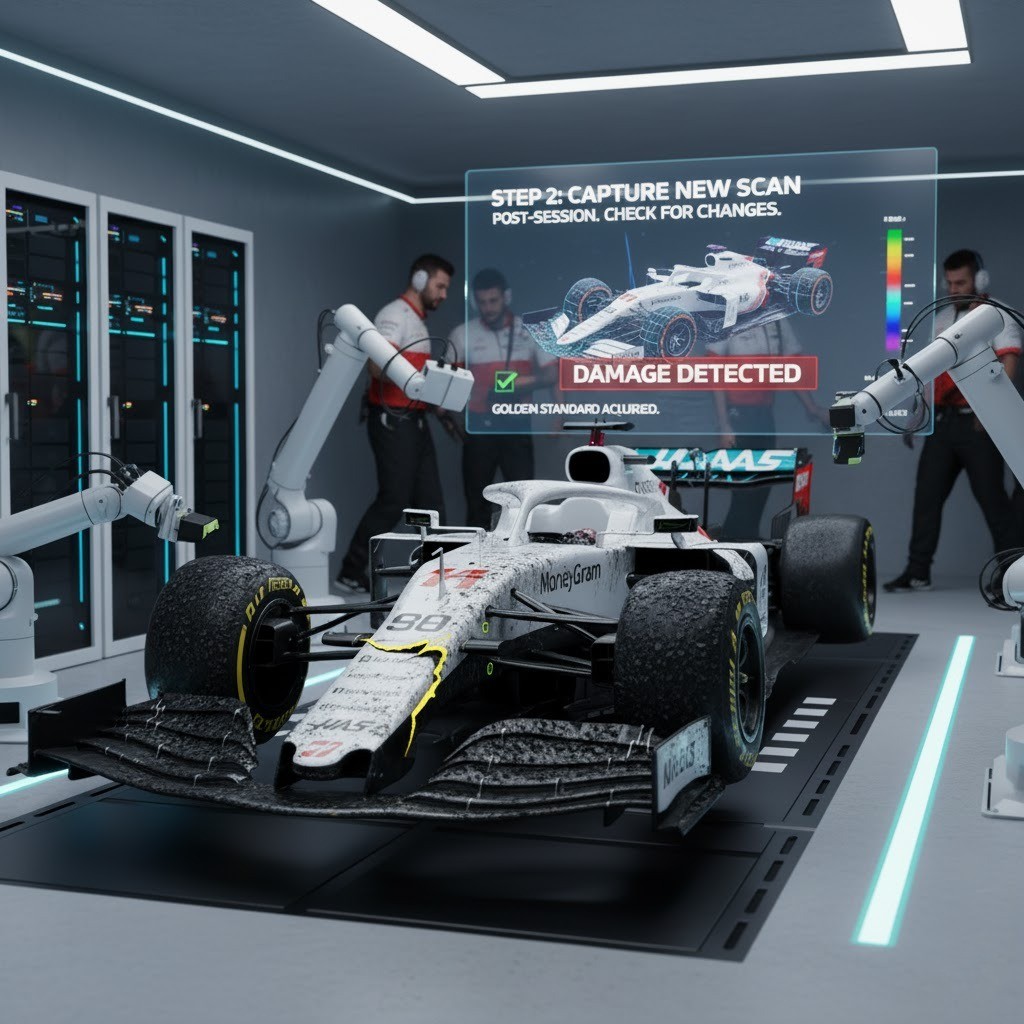
LiDAR step 2
-

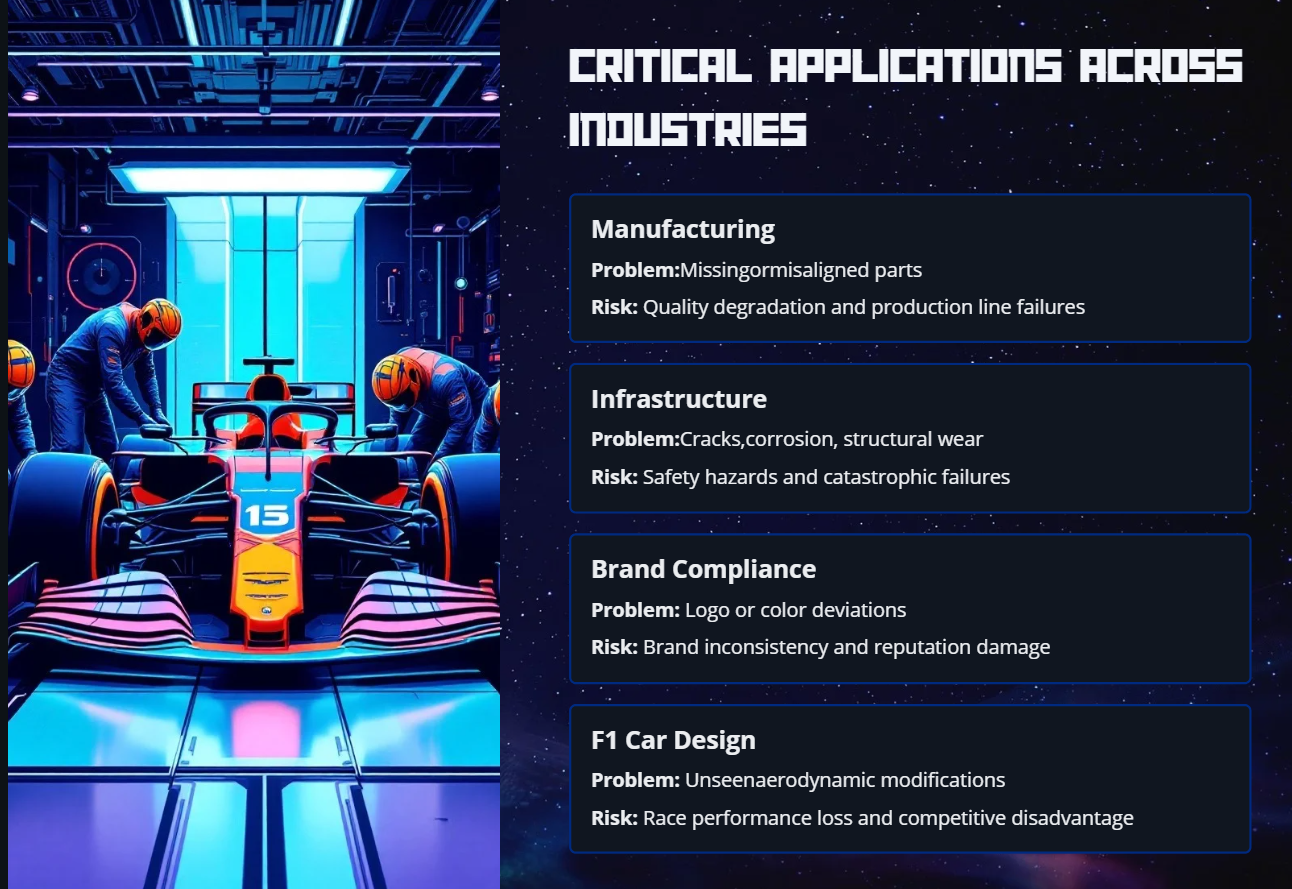
applications and tools
-
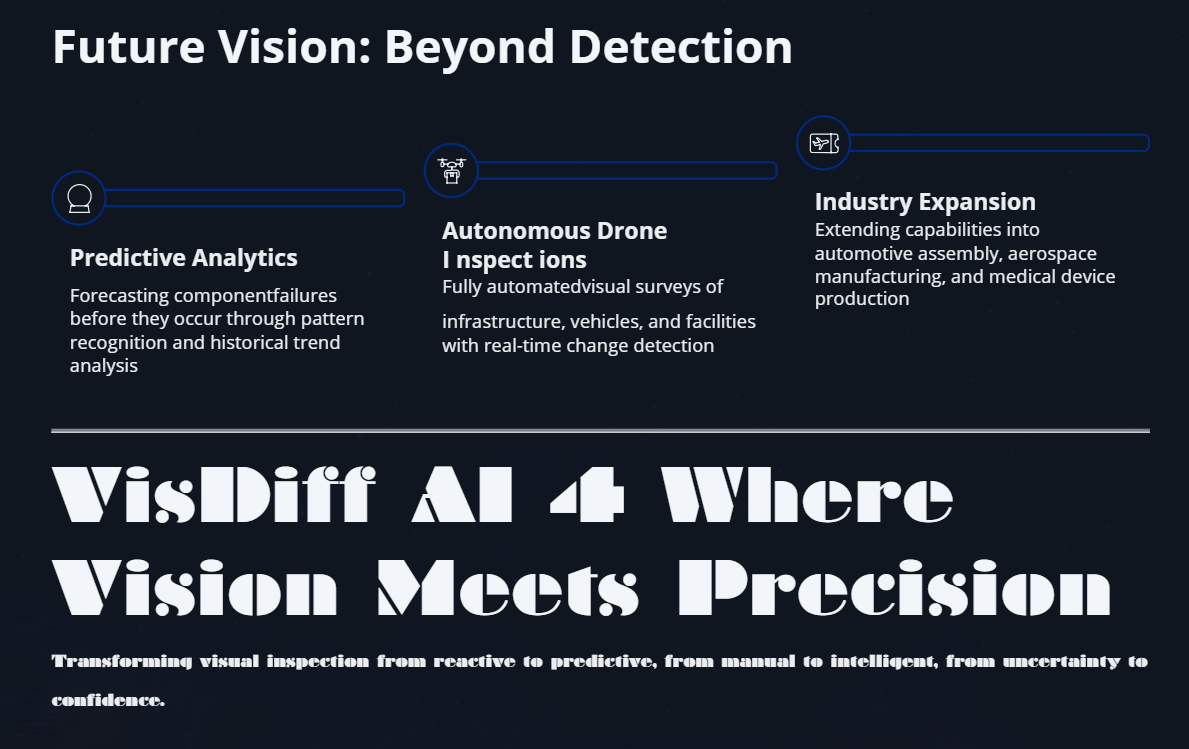
future vision
-
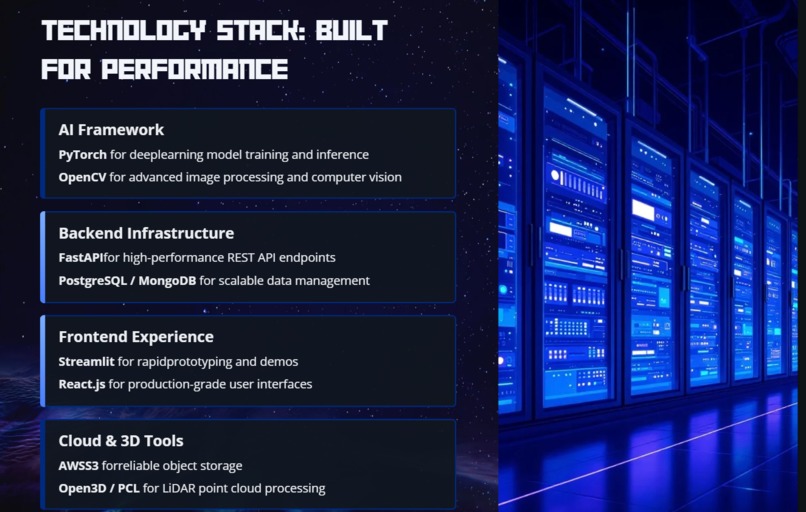
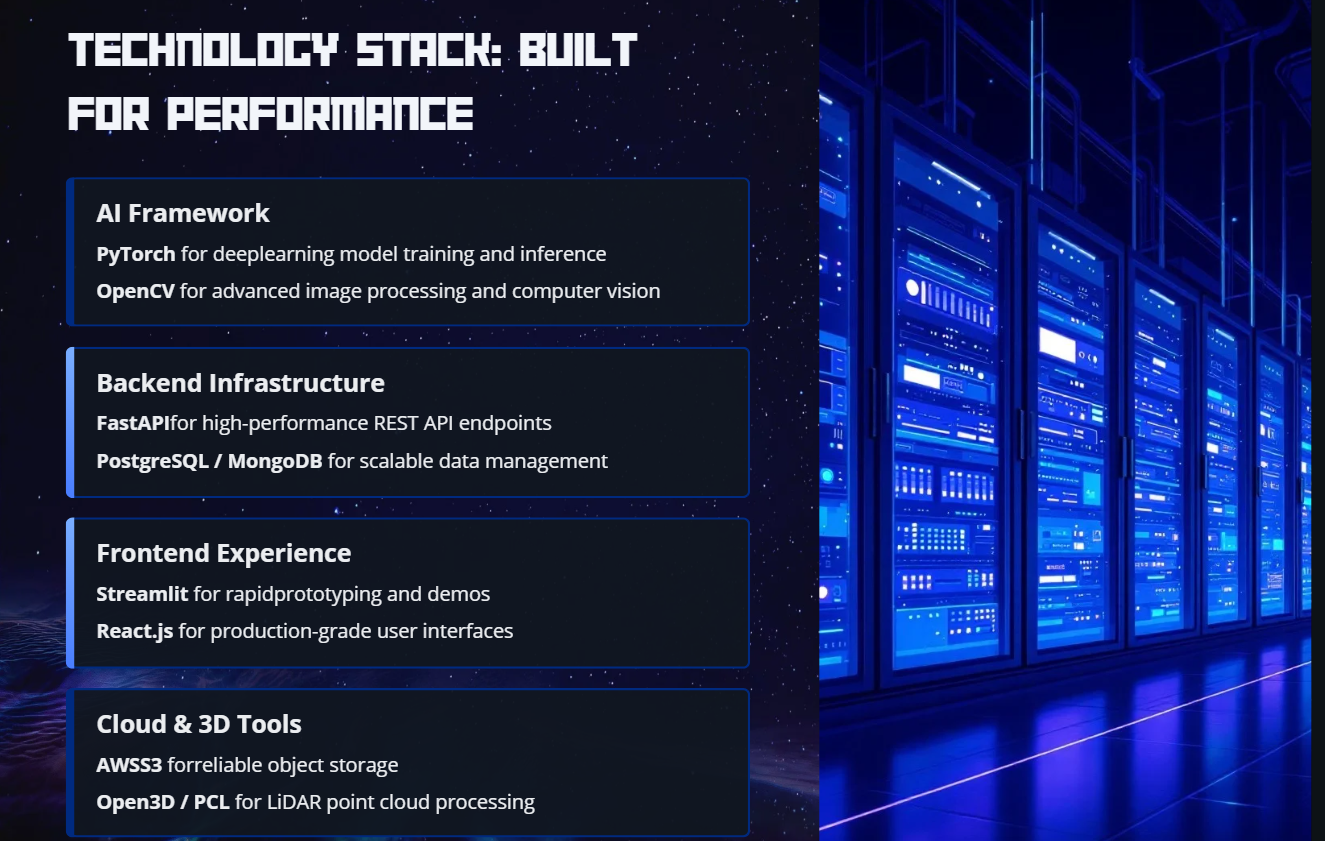
tools
Inspiration:
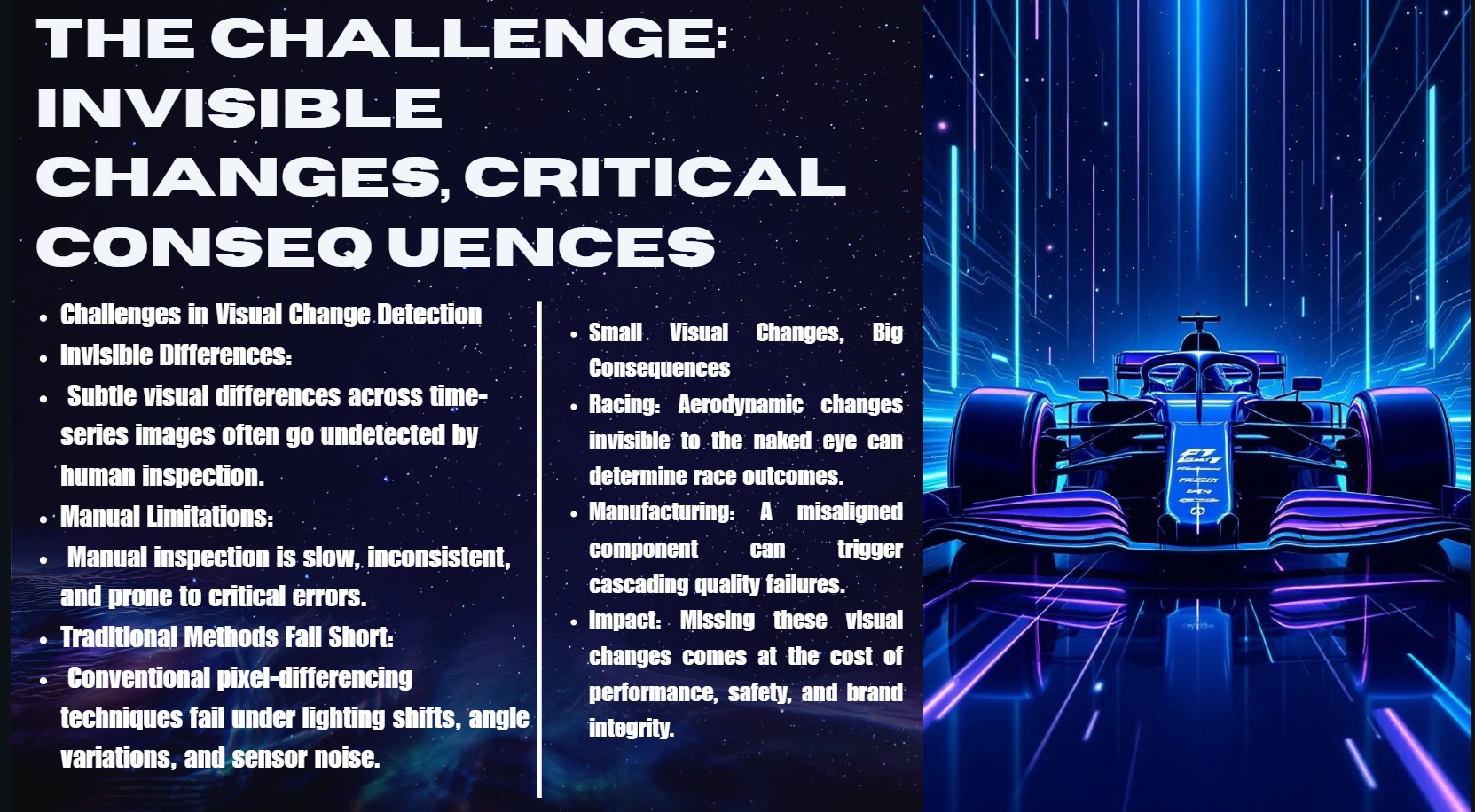
We were inspired to create VisDiff AI after observing how manual inspections in industries like manufacturing and infrastructure often miss small yet critical defects. The precision of LiDAR technology, used in autonomous vehicles to map their surroundings, fascinated us. It showed how depth perception and 3D imaging could revolutionize visual inspection. We wanted to combine this spatial intelligence with AI-driven image analysis to create a system that detects, understands, and explains visual changes automatically.
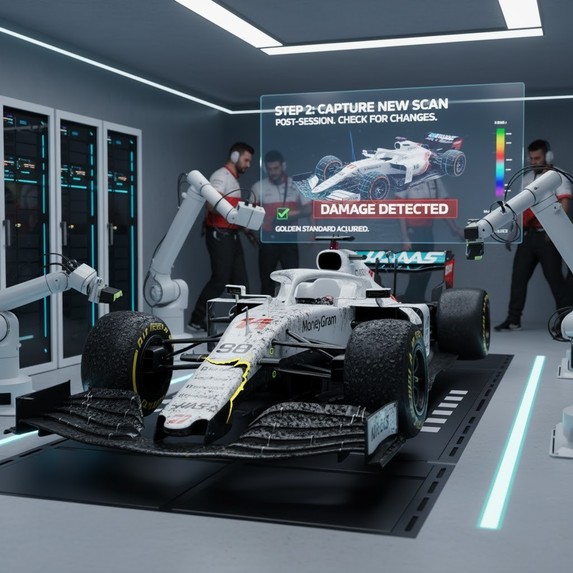
What it does:
VisDiff AI compares time-series images and LiDAR point clouds to detect both surface and structural changes. It identifies texture variations, deformations, or missing parts and classifies them into categories like “scratch,” “crack,” or “misalignment.” The system generates heatmaps, severity scores, and confidence metrics, allowing users to see exactly what changed, where it happened, and how serious it is. Over time, it tracks trends to predict degradation or quality shifts.
How we built it:
We combined deep learning and 3D sensing to make our solution. Using ResNet-50 and Vision Transformers, we extracted deep visual features from 2D images. We then aligned and fused these features with LiDAR-based depth maps to maintain geometric accuracy. The difference detection was done through SSIM and cosine similarity metrics, producing detailed change maps. Finally, results were visualized using an interactive web dashboard that displays comparisons, analytics, and change summaries.
Challenges we ran into:
Integrating LiDAR data with camera imagery was our biggest technical challenge. Precise calibration between both sensors required spatial alignment and noise filtering. We also faced issues with lighting variation, limited labeled datasets, and high computational loads. Optimizing performance without sacrificing accuracy took extensive experimentation. Creating realistic synthetic data for training and tuning algorithms for stability across environments was another complex task.
'''# simplified workflow images, lidar = capture_data() aligned = preprocess(images, lidar) features = extract_features(aligned) diff_map = compare_features(features) report = classify_and_visualize(diff_map) '''
Accomplishments that we're proud of:
We are proud that VisDiff AI accurately identifies subtle defects and structural variations even under different lighting or viewing angles. Achieving strong results on limited data and building a scalable system capable of running on modest hardware were major milestones. We also take pride in designing an explainable AI system that not only detects changes but visually communicates them through clear heatmaps and confidence scores.
What we learned:
Through this project, we learned the immense potential of combining LiDAR and AI for visual analysis. While traditional image comparison methods rely on pixels, integrating 3D geometry brings reliability and depth awareness. We also realized how essential explainability is in AI applications — users must trust what they see. Our journey taught us the value of collaboration, experimentation, and the importance of balancing innovation with practical usability.
What’s next for VisDiff AI:
Our next step is to make VisDiff AI a real-time, cloud-integrated platform capable of processing continuous image and LiDAR streams from IoT-enabled devices. We aim to implement predictive maintenance features, allowing industries to prevent failures before they occur. Expanding into sectors like smart cities, aviation, and energy infrastructure, we envision VisDiff AI as the go-to system for automated, intelligent visual change detection powered by LiDAR and artificial intelligence.
\SSIM(x,y)=(μx2+μy2+c1)(σx2+σy2+c2)(2μxμy+c1)(2σxy+c2)\

Log in or sign up for Devpost to join the conversation.