-
-
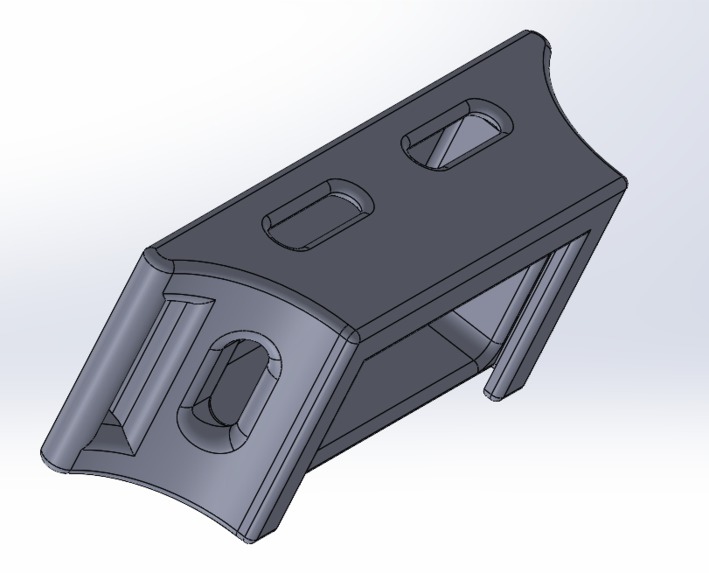
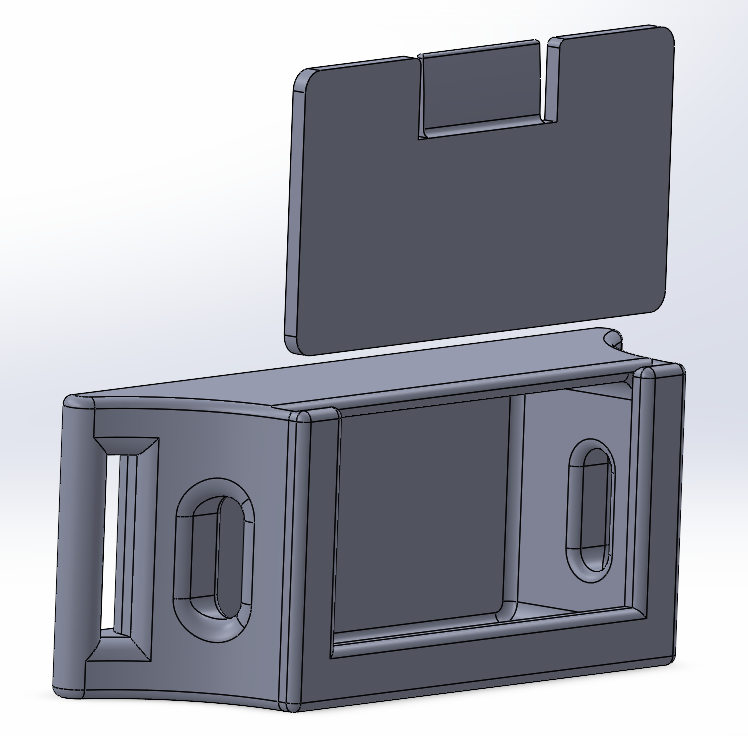
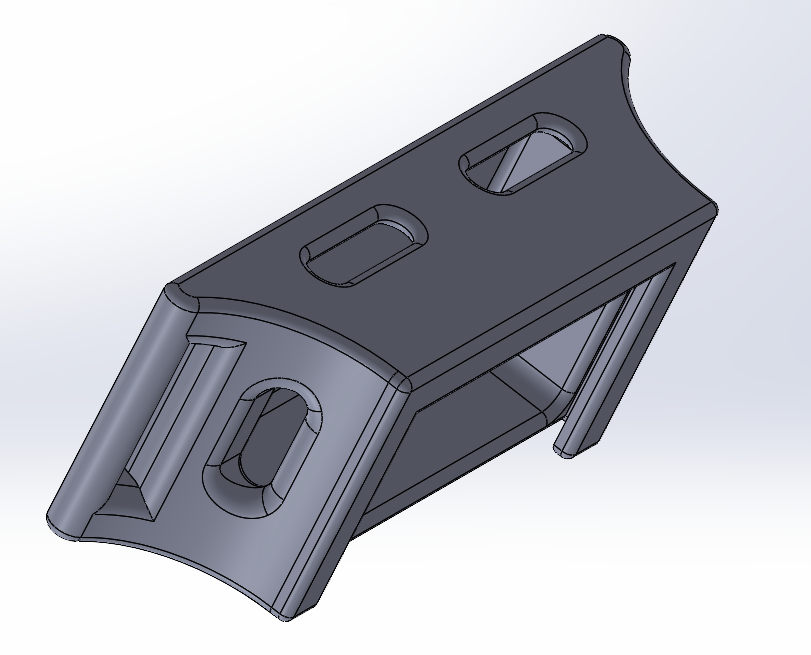
Barbell Cuff (Where sensor pack mounts to a barbell)
-
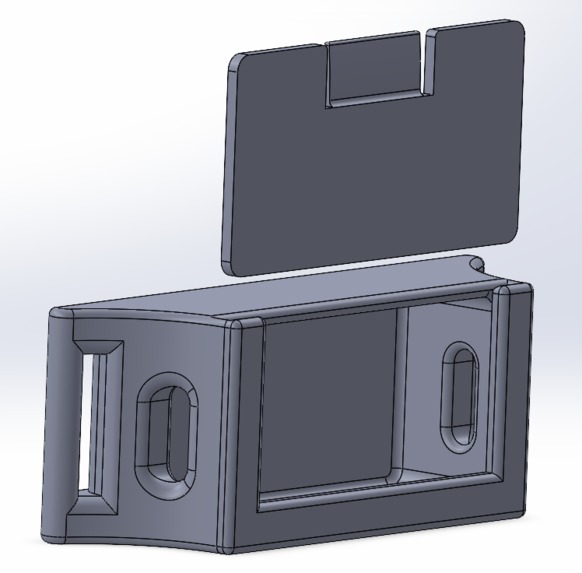
Barbell Cuff + Lid
-
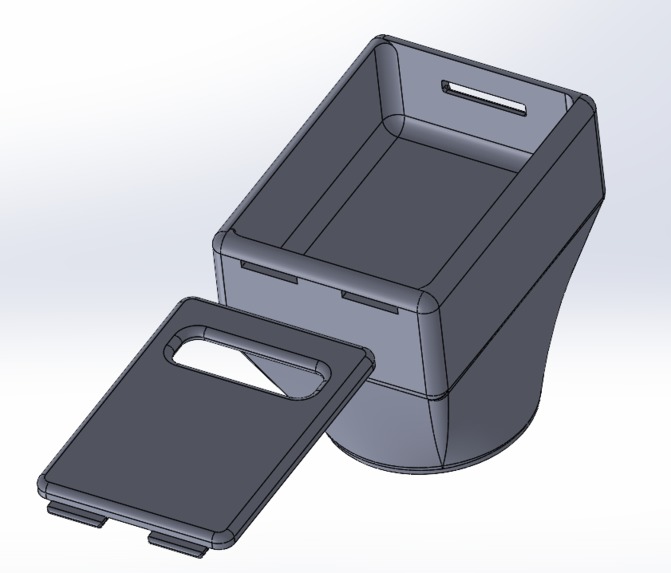
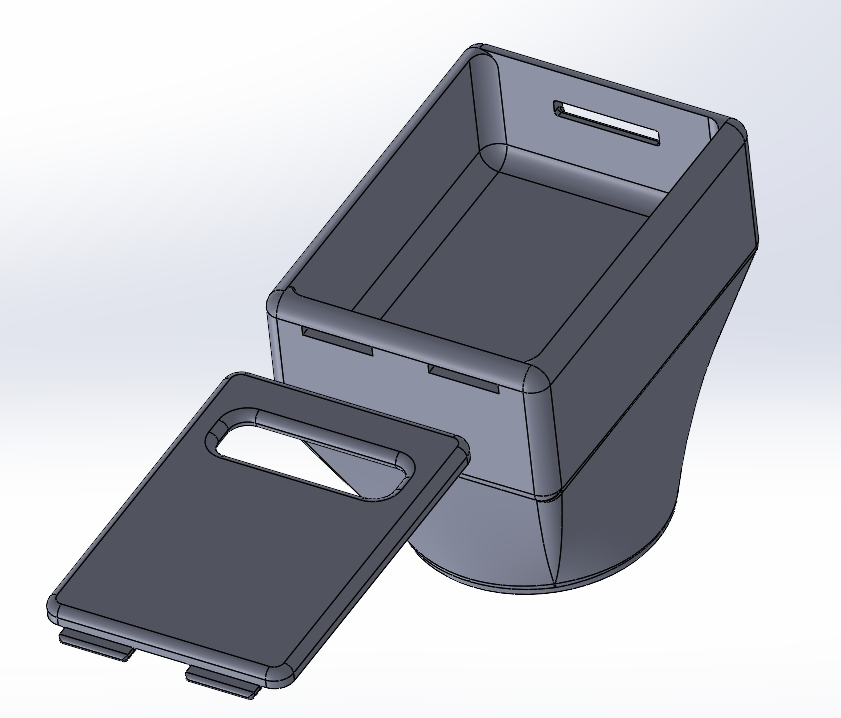
Hip Pack + Lid (Main electronics pack on hip)
-
Hip Pack Bottom
-

Barbell Electronics Unit
-

Sensor Casing Top and Bottom
-

Completed sensor casing, with velcro


Inspiration
Nobody likes leg day. For some, it's too taxing. For others, it's too risky. Without a fitness coach, it's hard to know whether you're pushing yourself or pulling a muscle. Lifting heavy incorrectly can lead to injury not just in the gym, but also in everyday life. Construction workers moving bricks, homeowners moving furniture, or gym-goers moving weights are all at risk of injury. Our inspiration for this project was to create a product that would help people lift safely.
What it does
Kinematech by Lift Logic is a wearable device that analyzes the user’s lifting form in real-time and provides feedback to the user to help them lift safely. For gym-goers, it tracks squat form, counts reps, and provides consistent spoken feedback to help them correct their form. For others, it tracks lifting form to prevent rounding of the back, bending at the waist, or other common mistakes such as twisting while carrying heavy weight. The wearable is designed to be nearly invisible to the user, so they can focus on their form without distraction. Additionally, it can alert the authorities if the user falls or injures themselves. The algorithms are backed by peer-reviewed research and built to be as accurate as possible.
How we built it
We designed a distributed IMU sensor network using five MPU-6050 accelerometer/gyroscope modules connected to an ESP32-S3 microcontroller across three I²C buses, with two sensors per bus differentiated by the AD0 address pin. The sensors are housed in custom 3D-printed enclosures with Velcro backing that attach to a pair of gym shorts and t-shirt at five key anatomical positions: both thighs, lower back, middle back, and upper back. All sensor wiring routes along the garment seams to a central hub board at the lower back, built on a 5×7cm prototype PCB with soldered female headers for the ESP32, a MT3608 boost converter and TP4056 charging module for portable LiPo battery power. A sixth MPU-6050 paired with a separate ESP32-S3 is mounted inside a 3D-printed sleeve that clips onto the barbell to independently track bar path and symmetry. The entire system streams real-time orientation data at 50Hz over WiFi WebSocket to a laptop ground station for processing and AI-driven coaching feedback. The web app is designed to work on both desktop and mobile devices, with easy-to-use controls for the user.
Challenges we ran into
Throughout the build, we faced challenges across every discipline. Our 3D-printed enclosures didn't fit on the first attempt, requiring us to modify them on the fly with heat guns and knives to get the sensor housings and hub case to proper tolerances. Even then, we still faced significant issues due to some lack of foresight on our part when constructing the closing mechanisms, requiring major overhauls that wee did not have time to fix. As a result, we had to create "band-aid" solutions to many of our problems, such as trimming our PCBs by hanging excess edges off the table and hammering them until they split. Soldering proved difficult as none of us had prior experience, and the prototype PCB's tightly spaced pins made clean joints especially challenging. Critical structural components failed twice during printing, forcing emergency redesigns and reprints that cost us valuable hours. On the electronics side, electrical noise between the closely routed I²C buses caused signal interference that degraded sensor accuracy until we addressed it with decoupling capacitors and reduced clock speeds. Our AI API usage limits ran out mid-development, temporarily halting our Claude-driven coaching model until we secured additional credits. Furthermore, our microcontroller ran off WiFi, communicating data through the same medium our website needed to use to analyze the data, so the software could only listen to one at a time. This required extensive workarounds and involved changing the IP address our microcontroller communicated with. Finally, our web dashboard initially rendered inconsistently across different browsers, devices, and screen sizes, requiring last-minute responsive design fixes to ensure a reliable demo experience.
Accomplishments that we're proud of
As freshman engineers and CS students, we had little experience applying our skills in real-world settings, but we still managed to build something from scratch. Designing 3D-printed housings proved more complex than expected, especially after overlooking fasteners, yet we successfully achieved precise friction and snap fits, at least before realizing our new electronic components would struggle to fit within the confines. We also hand-built our circuitry this time, unlike our experiences in more software-focused hackathons, and overcame that challenge to create a PCB hub we’re proud of, despite the flaws and bugs we endured. We found this to be a valuable learning experience for us, and it's one we are glad we went through and are proud to have stuck it out. On the software side, we developed a custom UI and backend that streams data at 50Hz from an ESP32, tracks reps, and flags form issues, which is far more complex than anything we had attempted before.
What we learned
Hardware is unforgiving. We learned the hard way that physical tolerances in 3D printing and electrical noise on communication buses require strict precision, often meaning we sized our parts attempting to account for unknown 3D printer errors, so post-processing took up a significant chunk of our time. Additionally, component dimensions often add up in unpredictable ways, especially when considering the need to start 3D prints sometimes before the components they were supposed to house had been finalized. Such obstacles taught us the importance of leaving margin for error. On the software side, we learned how to fuse raw IMU roll/pitch data into actionable biomechanical data, and how to effectively constrain an LLM (Gemini) so it acts like a strict, helpful strength coach rather than a generic chatbot. Our project as a whole faced numerous troubles, as outlined previously. Many of these troubles came from avenues we never anticipated, such as persistent firmware bugs and time-consuming tasks. This hackathon, in our opinion, was a great, practical lesson of Murphy's law. Expect the unexpected, and anticipate that whatever can go wrong, will go wrong. We must be prepared to deal with whatever possible issue our project may throw at us, and we cannot rely on the ideal situation.
What's next for Kinematech
In spite of our hardware issues, we believe our hardware is extremely versatile. Outside of fixing our obvious bugs and achieving our current goal, our next steps should involve taking this setup to the next level. Being able to take a wide array of data points from various sensors located at critical areas on the body allows for many more use cases than just at gyms or construction sites. We believe our product is capable of becoming a very useful safety wearable for all kinds of situations. It can also be easily adapted to accept different inputs or for different people. Some unique applications we are already thinking of: VR Video Games, loading/unloading furniture, elderly individuals with limited mobility, children learning to walk. Beyond the "form" aspect, there is a very key safety aspect to the product.
Built With
- arduino
- c++
- claude
- elevenlabs
- esp32
- framer-motion
- google-gemini
- mpu-6050
- next.js
- node.js
- purdue-genai-studio
- react
- tailwind-css
- typescript
- web-speech-api
- websockets
- zod

Log in or sign up for Devpost to join the conversation.