-
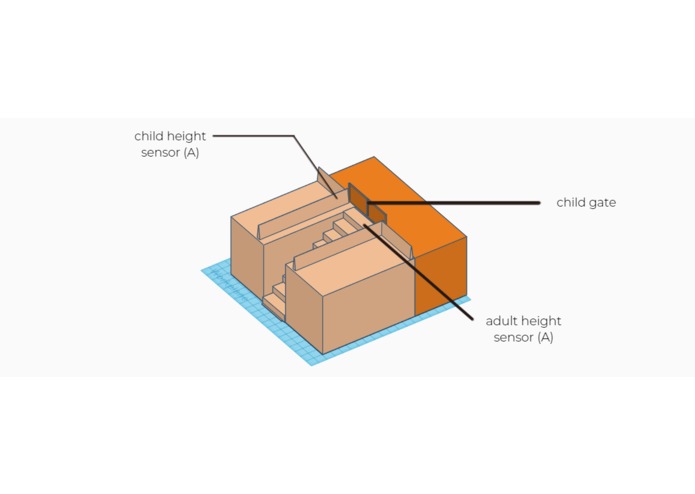
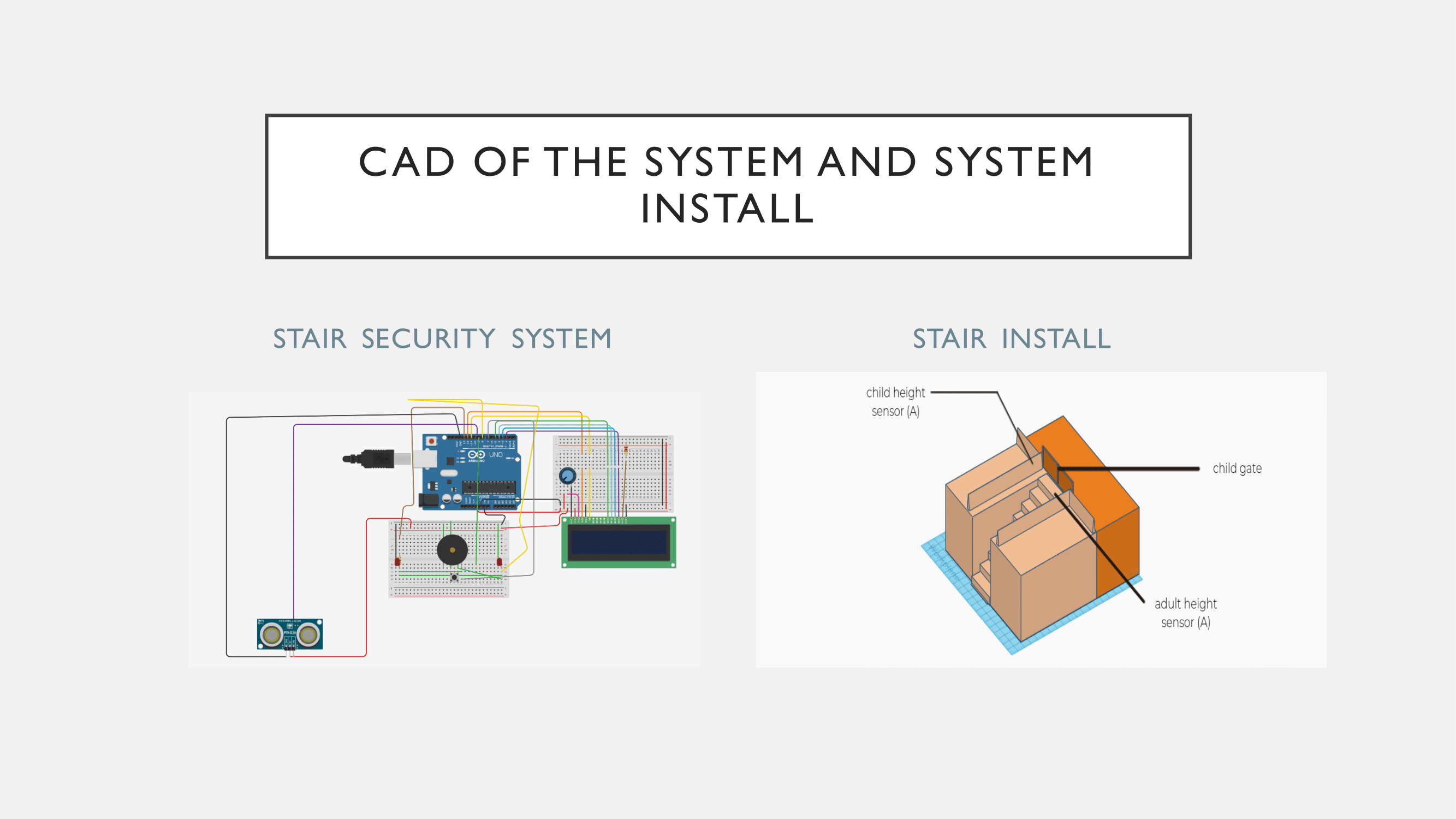
3D Outline of Placement of Sensors
-
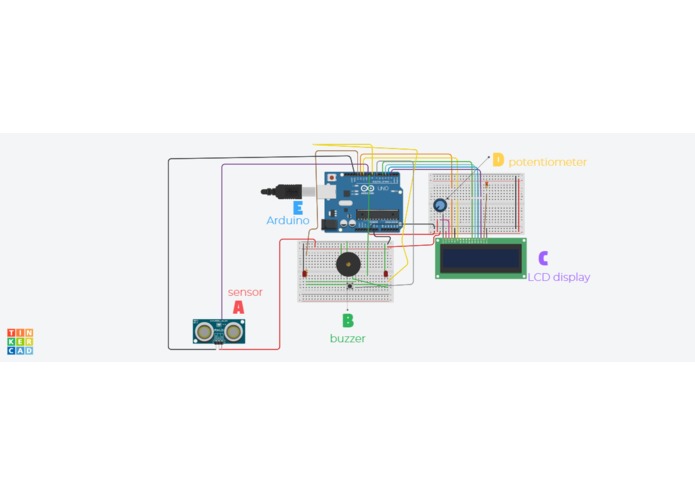
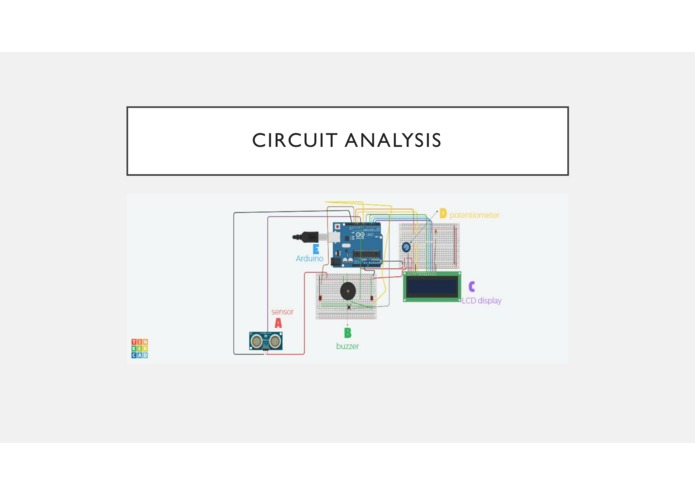
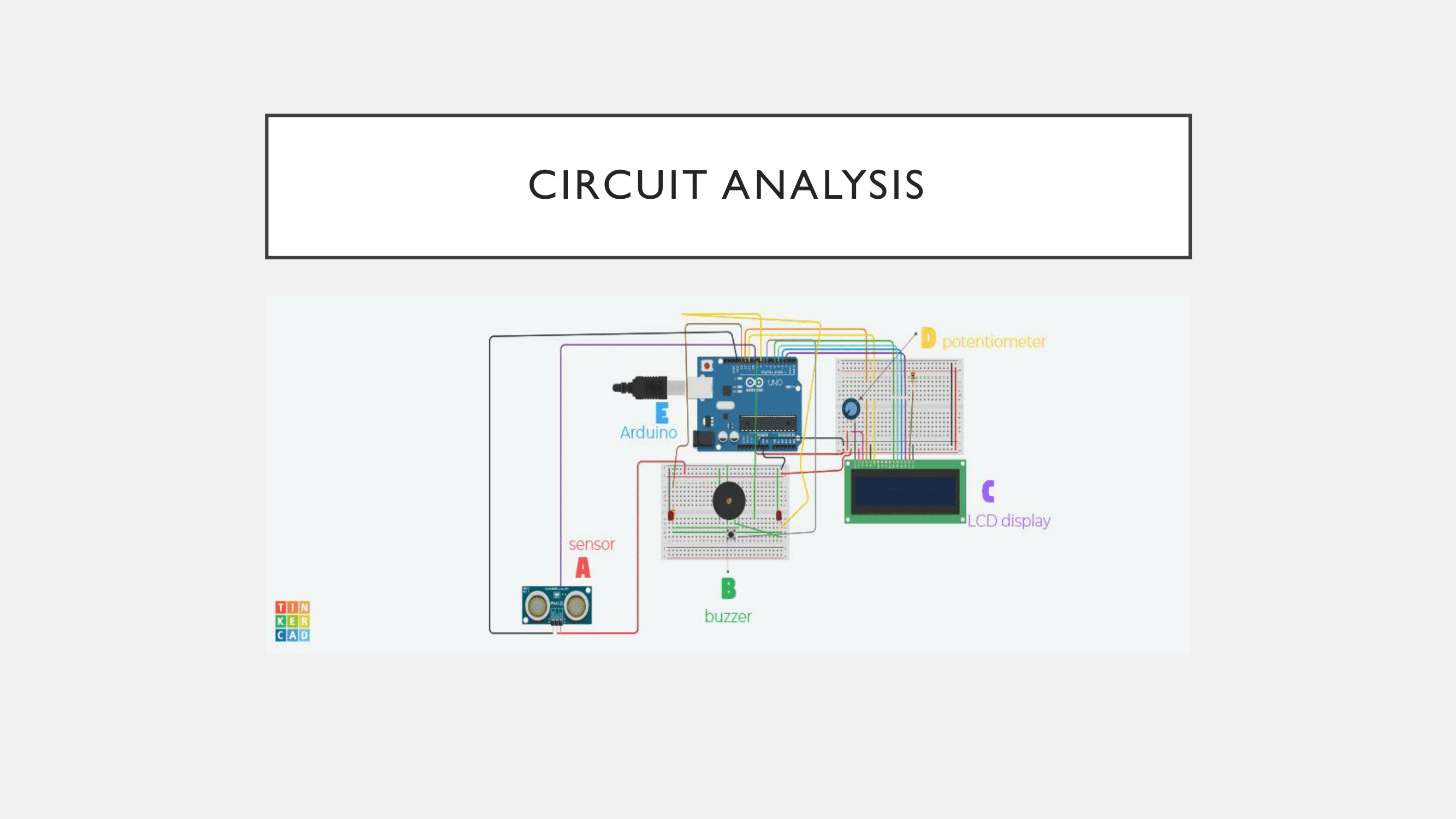
Circuit for one sensor and alarm system
-
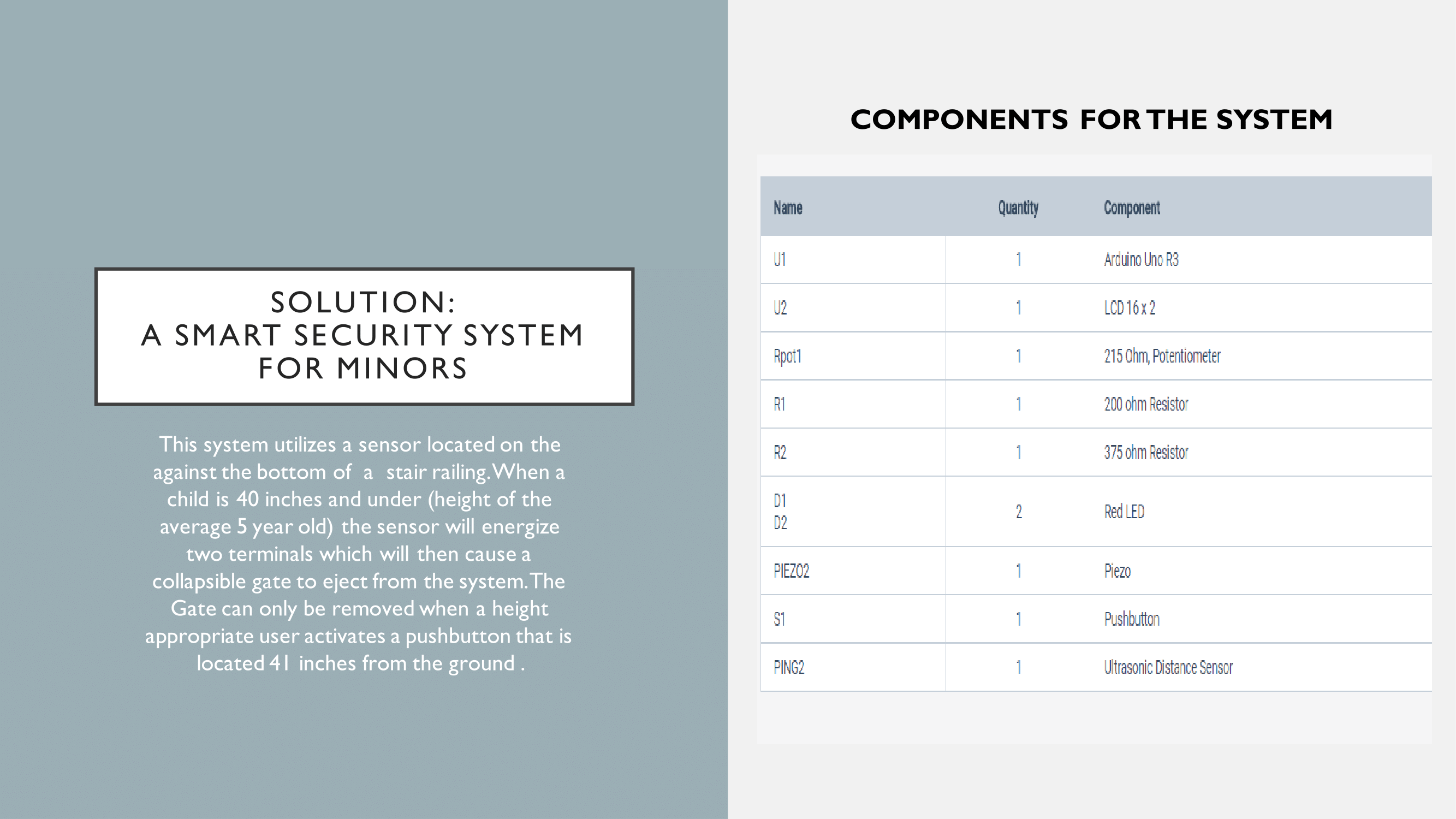
Slide 1
-
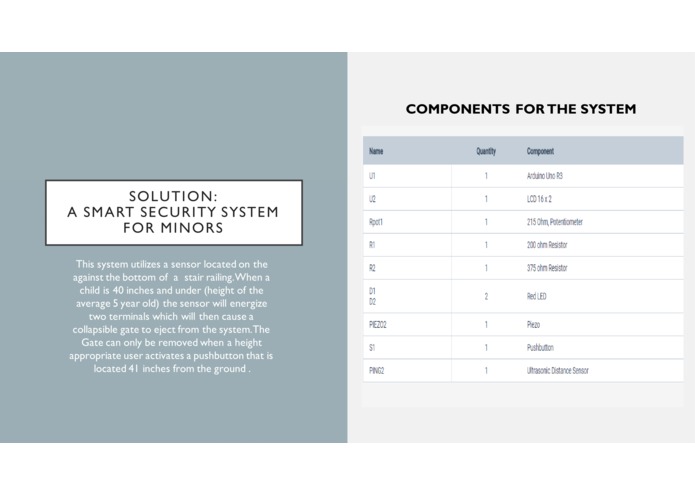
Slide 2
-
Slide 6
-
Slide 3
-
Slide 5
-
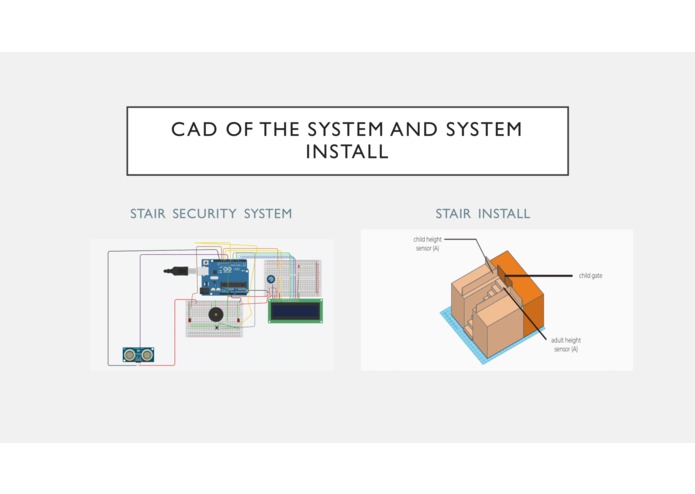
Slide 4

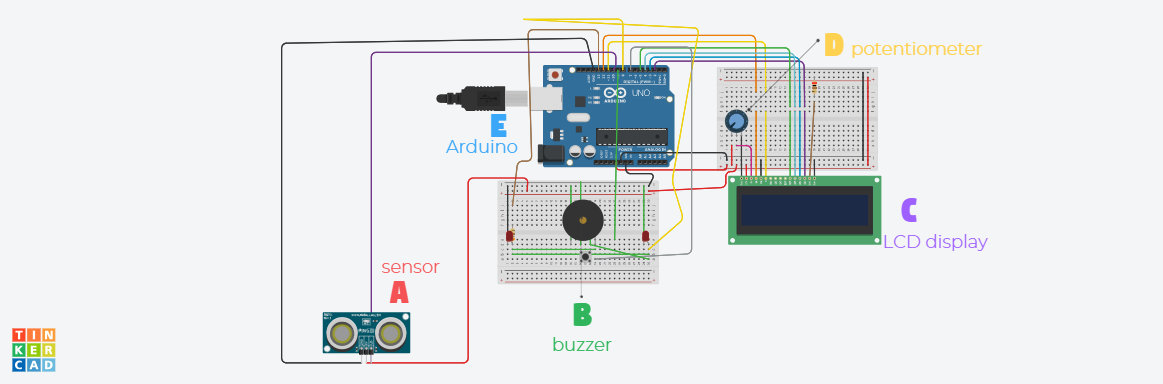
/*======================================================================================= Programmer: Jasmin Allen Date:10-20-18 Program Description: *This program was formatted for an ARDUINO UNO *. The program recognizes whether a child is 90 cm away or closer and energizes two terminals which hypothetically will be loaded with an electromagnetic collapsible gate. But fort he purpose of this demo it will be energizing two LEDs and a Buzzer in Parallel. Therefore by implementing a simple SSR relay it can be deduced that if the LEDs and buzzers are energized , so will the gate. (because its the same terminal).
Once the Gate is alarmed the micro controller will send a message to the Main LCD tell the parent the alarm was sound and then wait for a HA user (Height Appropriate User ) to motion to a sensor that is taller than the average 5 year old. Once the sensor senses the motion the system will disarm.
======================================================================================*/
include //Library for LCD Usage during the duration of this program
LiquidCrystal lcd(12, 11, 5, 4, 3, 2); // initialize the library with the numbers of the interface pins int count = 0; int sensor = 0; int HA_sensor = 0; int low = 95 ; int verify = 0; int adult =0;
int pinButton = 9; //the pin where we connect the button int LED = 13; //the pin we connect the LED
long readUltrasonicDistance(int pin)
{
pinMode(pin, OUTPUT); // Clear the trigger
digitalWrite(pin, LOW);
delayMicroseconds(2);
// Sets the pin on HIGH state for 10 micro seconds
digitalWrite(pin, HIGH);
delayMicroseconds(10);
digitalWrite(pin, LOW);
pinMode(pin, INPUT);
// Reads the pin, and returns the sound wave travel time in microseconds
return pulseIn(pin, HIGH);
}
void setup()
{
lcd.begin(16, 2); // set up the LCD's number of columns and rows
pinMode(9, INPUT);
pinMode(13, OUTPUT); //Set pins to 13 *controls both lights and push button
pinMode(10, INPUT);
pinMode(pinButton, INPUT); //set the button pin as INPUT
pinMode(LED, OUTPUT); //set the LED pin as OUTPUT
}
void loop() { digitalWrite(13,LOW); //Initialize OUTPUTS sensor = 0.01723 * readUltrasonicDistance(10);
if(sensor > low) { lcd.setCursor(0, 0); lcd.print("Stairs All clear."); delay(250); lcd.clear();
} else { digitalWrite(13,HIGH); lcd.setCursor(0, 0); lcd.print("System Armed"); delay(250); lcd.clear();
adult++;
}
if(adult!= 0) { HA_sensor = 0.01723 * readUltrasonicDistance(9);
if(HA_sensor < low) { verify++; }
if(verify != 0) {
digitalWrite(13, LOW);
lcd.setCursor(0, 0);
lcd.print(" System Disarmed.");
delay(100);
lcd.clear();
} }
}

Log in or sign up for Devpost to join the conversation.