
Inspiration
Our thinking process for this challenge started with identifying possible dangers that first responders encounter daily and in on-field operations. Some of these included infrastructural obstacles, physical limitations, and time constraints. We then looked over some cases and observed the higher number of casualties caused in areas that are hard to navigate or reach such as high-traffic cities, remote locations, etc.
After some deliberation we concluded that a device that can aid the people in need for a temporary period before the first responders can arrive at their destination is crucial to the mission. Along with this, aiding the first responders in their duties at the scene and providing them with crucial information about potential hazards is essential.
Our attempt to fulfill these criteria led us to the autonomous drone system - VEX (Versatile Emergency Explorer).
What it does
Our drone has multiple abilities to aid in the aforementioned tasks. These are elaborated as follows It is autonomous and directly inputs information when an operation begins. It attempts to go towards the location in an efficient manner using its built in map database and starts the sensors. It can be given manual instructions and controlled, however by default it runs autonomously. After the operation ends or the information that the first responders have reached or the operation has been completed, it docks itself back to the main and starts charging via the docking station. It consists of multiple sensors that can detect certain aspects of the situation. Some of them are temperature sensors, motion sensors, ray detection, Gas identification sensors and sound mics. Based on the situation or the office that uses the VEX, it can also include other sensors such as radiation detectors etc. The temperature and motion sensors can be used to identify any life and other discrepancies in the data feeded to the drone regarding the situation. The ray sensor is highly useful for identifying objects, buildings, mappings etc. using various types of detection mechanisms, especially infrared and photoelectric. Capacitive sensors and other metal detection items can help in operations in cities and highly populated areas, also in operations that can cause threat to other people via weapons etc. Infrared sensors are used for pipe detection and identifying the water and electric system in buildings. Photoelectric detectors are used in smoke detection, determination of the dimensions of objects and materials etc. It directly sends all its observed data to the places connected by the office in use i.e the vehicle on the way there, the main office etc. It also includes a tiny speaker that can broadcast audio for first aid instructions, on field aid etc. One of its most important qualities is that the VEX drone is highly durable. It can fly up at high speeds and high altitudes to reach the given destination, with very minimal casualties or damage taken by the body.
How we built it
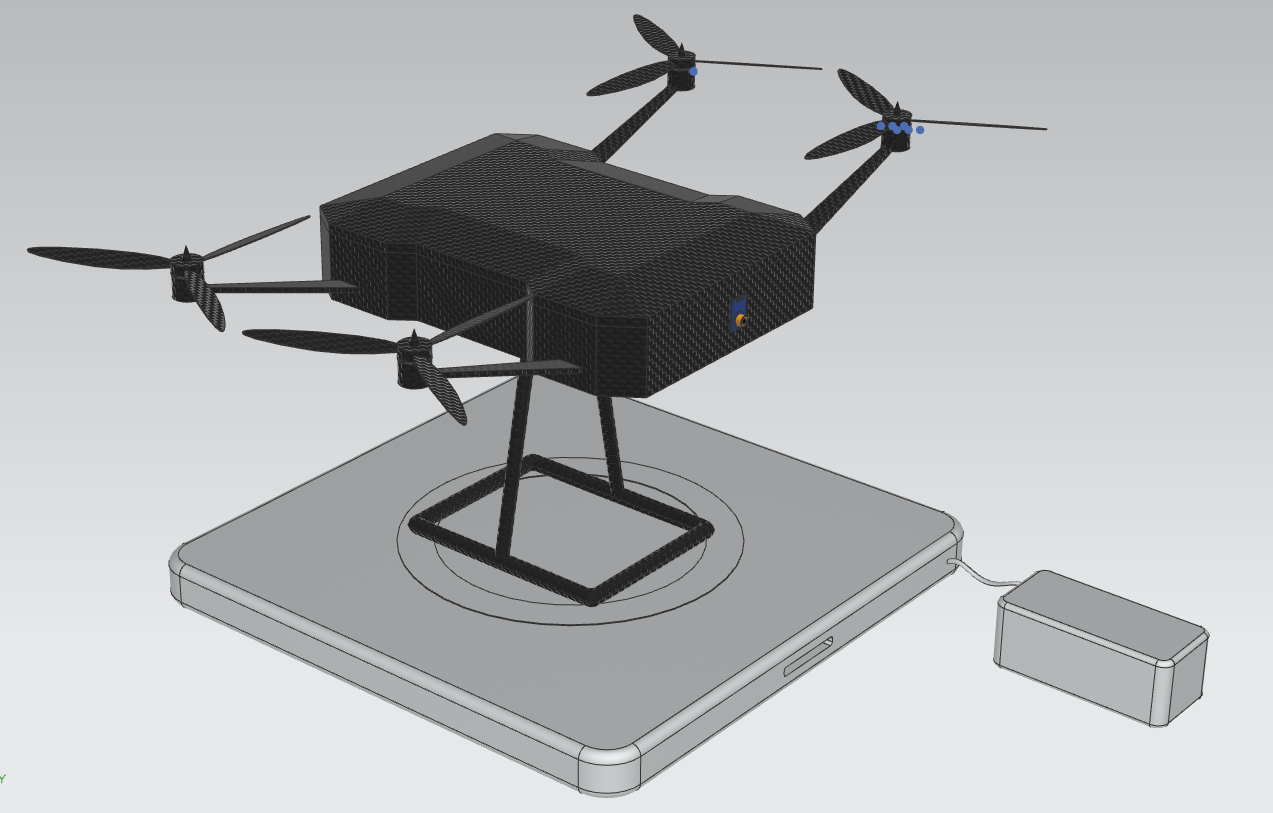
Before we could even start cadding, we made a checklist of all the individual parts we needed. This included Docking station Drone Frame Camera sensors - Infrared sensor, thermal sensor, regular camera Speaker Gas Identification device Propellers Lights Storage / Landing Supports When designing each component, we ensured that the dimensions matched those of the actual sensors we plan to purchase for this drone. We carefully considered the cost of each part, selecting the most efficient and cost-effective options. For the docking station, we designed it to be 0.6 x 0.6 meters, providing ample space for the drone to land. It features wireless charging, represented by the white circle, and includes a ground charging port to charge additional batteries. Since the drone will have a high discharge rate, wireless charging cannot be the primary charging method, which is why we incorporated ground charging as well. The drone frame follows a simple geometric design, measuring 0.2 x 0.4 meters. It is compact enough to maneuver easily while remaining large enough to accommodate internal components and potential storage boxes. The body is constructed using carbon fiber-reinforced polymer (CFRP) for durability and lightweight performance. The camera module is designed as a shell housing three separate cameras: a thermal sensor, an infrared sensor, and a high-resolution camera. We also built a mount that allows vertical movement, controlled by the user. The camera housing is made from the same CFRP material as the drone body. The speaker is designed based on the dimensions of a mini speaker with a range of 30–70 feet, ensuring it fits within the drone’s frame while maintaining effective audio output. For the gas sensor, we used the MQ-3 Gas Sensor as a reference while modeling our design. The propellers were designed with a creative approach rather than referencing an exact model. We first created the center and blades, then added the motor, and finally attached the arm. The propellers are also made from CFRP, ensuring strength and efficiency. The drone is equipped with a simple LED light for illumination. For storage and landing supports, we drew inspiration from existing drones with similar support structures, ensuring the design could securely hold potential storage boxes for first aid delivery or other materials. These supports are also made from CFRP for structural integrity and lightweight efficiency.
Challenges we ran into
There were several challenges we ran into as we progressed through our project. Some of these are as follows:
One of the primary challenges we faced was the usability of a drone or any electronic device in the field. Firefighting has evolved into a highly ritualized process, where introducing a new device can become more of a liability than an asset. The addition of this to a routine can initially cause a lot of delays with the operation. However, we attempted to solve this problem by making it as simple to use as possible. Highly efficient with minimal effort required; we attempted to make this autonomous by default, which can become a manually operated device on command. Another major challenge in our design was the efficiency of the drone. The drone needed to be fast and durable, both of which together are extremely tough to achieve under a budget. To solve this, we used carbon fibre polymers (an affordable and temperature-resistant alternative to traditional carbon fibre) and by trying to find the ideal balance between speed and the weight of the drone. We also tried to lower the additional weight and storage issues by issuing more space-effective solutions to the sensors and the external storage. One of the biggest obstacles we faced in this design was batteries. Carrying multiple spare batteries for all the power-driven equipment in use during a mission adds significant dead weight which is often underutilized. Having another large electronic item such as a drone and having to carry its batteries or power supplies increases the dead weight and can cause more injuries. We tried to minimize the battery usage and provide good health batteries using LIPO batteries (22Ah). We also made the docking station of the drone temporarily chargeable, which can later be plugged into a charging station for better battery capacity. This can ensure that the drone doesn’t completely lose charge. However, reducing the battery deadweight is still a challenge in our design which we will try to fix with further revisions and research. Drones already have a certain weight limit, which with the sensors and external storage can cause more weight. This causes a variety of problems such as power drainage, speed and physical limitations etc. So our initial idea of adding a tiny storage compartment for first aid kits had to be removed, however with good research and building we might be able to overcome it in the future. One of the most important issues we faced which had to be addressed, was the durability of the drone in the harsh conditions that which drone was built for. For this we used materials such as carbon fibre, propellers built of polymeric fibres, high-pressure and high-temperature withstanding compounds etc. such that it can perform its duties well. The last problem we encountered was cost efficiency, our drones initial designing cost itself added up to roughly 1000 USD. We intend to make it cheaper in the future using budget based cost efficiency such that it can be widely used even in low-income regions.
Accomplishments that we're proud of
Over the course of this CADathon, we learnt a variety of new skills and information, got to network and experienced what it feels like to partake in a CADathon. Some of the things regarding the project and the CADathon in general that we’re proud of are as follows:
We gained a deeper understanding of material sciences and its role in product performance. We went through the properties of different materials, and tried to choose the right ones for our design. Several things like strength to weight ratio, temperature resistance etc. were a crucial part of the design. Another accomplishment we’re really proud of is the research we did. We analyzed multiple things in a really short period of time to deal with all the challenges we faced, all the problems we encountered in designing etc. The last and most important thing that we take pride in is the CAD project itself that we made in such a short time. We had to learn a lot of things in the software and we experimented with a bunch of different features which helped us a lot too.
What we learned
This challenge allowed us to go through several challenges, each of which gave us insight into a variety of things which are helpful for us in both current and future prospects. Some key takeaways from the experience include: We gained significant proficiency in CAD skills and design principles, allowing us to create more detailed and accurate prototypes. We learned how to work with certain CAD skills like assembly, 3D modelling, rendering etc. which improves how we work in this challenge. We also gained insight into first responders and firefighting. We learned about various tools, equipment etc. they use, emergency measures, operation protocols, and other specific needs of firefighting and other safety offices. One of the most important things we researched on were emergency rescue missions and operational requirements. We realized the complexity of real life emergency situations and logistical challenges in these operations. The research we put into this helped us design our project and address key issues regarding support and security. Aerospace modelling and design was a large factor in these things. We had to study a lot of things regarding aeromodelling such as dynamics and stability to optimize our design for the drone. Material selection and the science behind several things was one of the biggest takeaways from this challenge. We had to figure out several things and make revisions to our components, materials etc. to make our project suitable for our concern. The last thing we learned in this challenge was problem solving, and skills such as constraint optimization and collaboration. Each of these is highly useful for us in the future in all fields of engineering.
What's next for VEX Drone
In the future, we plan on optimizing and evolving its design to meet the evolving needs of first responders. We will persist in optimizing the drone's performance by reducing weight, extending battery life, and expanding its sensor capabilities to handle even more complex emergency scenarios. We also aim to create new ways of integrating VEX into existing emergency response systems for easy communication and operational effectiveness. Through continuous research, testing, and feedback, VEX has the potential to become an immensely beneficial tool for first responders, which in the end enhances safety, speed, and efficiency in emergency response.
Built With
- cad

Log in or sign up for Devpost to join the conversation.