-
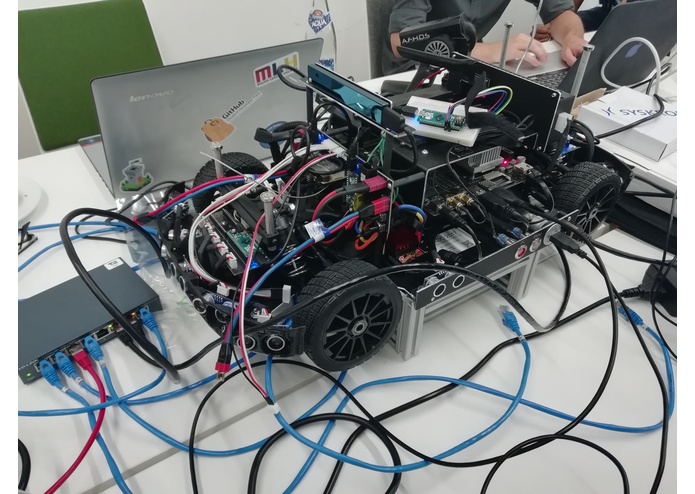
AADC car

Inspiration
Vector provided a challenge to just code something for their 1:10 scale model car equipped with an NVIDIA TX1 Development board and a lot of sensors (e.g. ultrasonic sensors, RGBD camera...). We wanted to try using AI to make the car drive autonomously.
What it does
- looking really cool
How we built it
- AADC car from Vector
- Implemented ROS
- Access camera, drivetrain, supersonic sensors for steering, driving
- Image processing using opencv, visualisation with SLAM model on RVIZ
Challenges we ran into
- At first, the Wi-Fi didn't work, so we needed way more time to configure it to the point were all team members could work properly on the car.
- The Jetson TX1 embedded controller which is running and optimized ubuntu version, challenged us many times. Proper working, package installing and running commands did not work as expected, so we had to spent much time on learning how the system works.
- Unfortunetely the system crashed on saturday evening and we were forced to reflash the system again. Therefor the whole work we did before hat to be done again.
Accomplishments that we're proud of
- Never gave up, even when the hardware forced us to start all over again with 15 hours left.
- ROS is running properly
- image recognition with turicate and a coreML model
- Still loving the car, after all the pain we went through
What we learned
- implementing ROS to an embedded controller
- image proccessing
- Never forget to backup :(
- NEVER GIVE UP!
What's next for Vector Challenge
- Proper ROS Implementation
- Image processing using the on-board Intel RealSense R200 RGBD Camera
- SLAM model creation
- Lane-following
- Obstacle-avoidance based on camera and supersonic sensors
- Drifting



Log in or sign up for Devpost to join the conversation.