-

Idea sketch
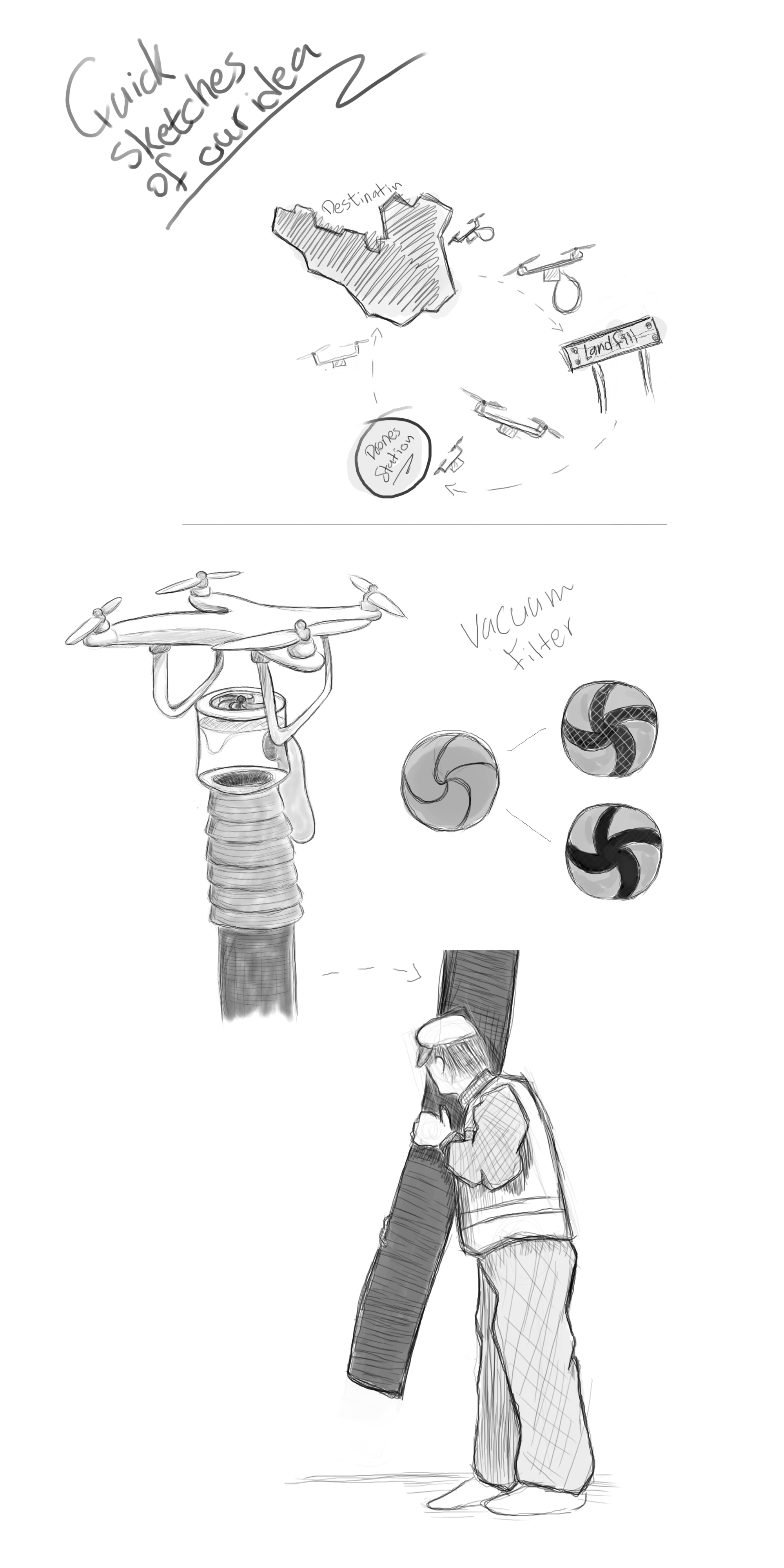
Inspiration
قبل بضع سنوات سمعنا عن فكرة إرسال نفاياتنا الى الفضاء الخارجي. هذا كان الهامنا. استغلال مساحات مهملة وتوظيف التكنولوجيا المتقدمة كالدرونز لتسهيل عملية إدارة النفايات في المشاعر المقدسة بتقليل كميتها.
What it does
التحكم بمكانس كهربائية مدمجة بالدرونز تشفط النفايات من مناطق معينة كإرسالها الى مكب النفايات لإفراغ حمولتها، او محطة الشحن لإعادة شحنها باستخدام برمجيات متقدمة تنظم اماكنها وعملية سيرها مما يؤدي الى تقليل عدد العمالة و النفايات بنسبة 53% تقريبا في المساحة المدروسة -منى- و رفع التكنولوجيا في السعودية إلى مستوى آخر.
How I built it
Application interface design : illustrator Adobe Idea: A similar vacuum drone above a map of Mecca(خريطة المشاعر) I put an Islamic pattern at the background to give the Islamic sense on and make it more related to “Alhajj”
The colors in the design i chose to make it more flat design which focus at the big picture of our idea (the vacuum drone) and make it more simple modern design app
Application programming: I'm Safiah Abdullah Alswaini, I'm playing Android Application developer role in my team, I have developed a Vacuum Drones System's phone application using Android Studio soft ware with java language, also create database for the app using phpmyadmin , wamp server, and netbeans to develop php files. the database have two entities: User and vacuum's Drones data. the app contain many interfaces to enable user (employee) to see Vacuum Drones' data and location, also I used firebase and google maps services in app to provide Vacuum Drones' location.
vacuum drones control system: We start controlling the vacuum drones system with making DroneKit setup, create simulator with (SITL), see and check our work with mission planner. Commands window: We installed proxy DroneKit and Dronekit as ITL software then we start our simulator choosing our latin and longitude location and a copter as a vehicle. Then we start MAV proxy that connect the local host on TCP port and shearing the connection to the UDP port. Then we connect our mission planner to UDP port and everything run as we were connected to the vehicle.
Python code: We wrote the script with importing DroneKit. It’s especially for importing connect vehicle mode and location global or relative. also we bore time. Then we start connection the vehicle by importing the argument parse library that will allow us to pause to pass some argument when we call the script. so we will use connect the argument the connection string. DroneKit can connect using serial or TCP or UDP connection. We have just specified the connection string as an argument. so we can equate the vehicle and we print connection to the vehicle connect string. Then we have connected. Then we defined the function for takeoff and landing, so we called this function arm_and_takeoff and we pass the target altitude. We first check if the vehicle is our mobile and if it is then we switch the vehicle mode to guided and then we arm. Now a vehicle arm is both read and write variable, so we can read if the vehicle is armed or we can write true in order to write to arm the vehicle or false in order to disarm a vehicle. we take off and use a via in the function vehicle_simple_takeoff passing the target alttitude and the we wait for the vehicle to reach the target altitude and we check altitude using altitude using vehicle location global relative frame altitude. We don’t write the main program so until now we arm and take off and we pass the alternative ten meter and then what we want to set up that they fall speed and we said the vehicle air speed or ground speed it doesn’t matter because it’s a multi router and then we want to go to Waypoint. We copied and past the Waypoint. Then we assigned Waypoint one as a location global relative of these like it’s not longitude and we set 10meters as altitude and so here now once the system is going to wave on one we can do pretty much whatever we want.
Mission planner: When we close connection and we write vehicles up close and we’re good so test our system we call script passing the connection string as localhost port and the vehicle connects and finds the quadcopter and then initialize the model and then arms and takes off and once they reach 10 meters it flies to Waypoint 1 it waist 30 seconds it will switch to return to disconnect.
We still working so we going to update the rest of how we build the controlling software soon..
Challenges I ran into
-The short time
- The internet connection in the first day
- The time of the Hackthon is the same time of our summer semester exams. ## Accomplishments that I'm proud of
What I learned
What's next for Vacuum Drones System
استخدام الذكاء الاصطناعي لجعل مكانس الدرونز ذاتية التحكم وتقوم بكامل العمل دون اَي تدخل بشري (تحديد أماكن جمع النفايات،عملية تنظيف المكان، افراغ محتوياتها بمكب النفايات، شحن نفسها)
Built With
- 000webhost-server
- android-studio
- arduino
- command
- drone
- dronekit
- electric-circuits
- mission-planner
- photoshop
- terminal
- ubunto-linux




Log in or sign up for Devpost to join the conversation.