-
-
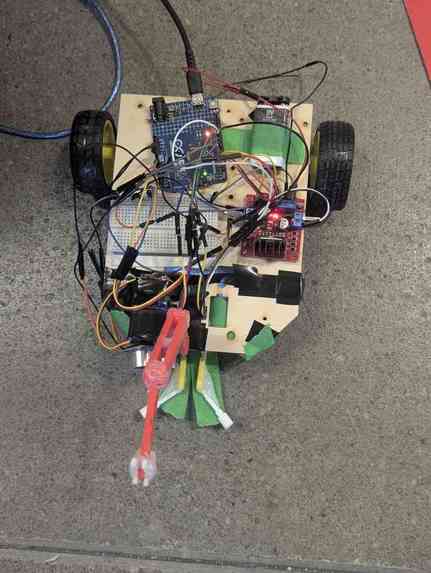
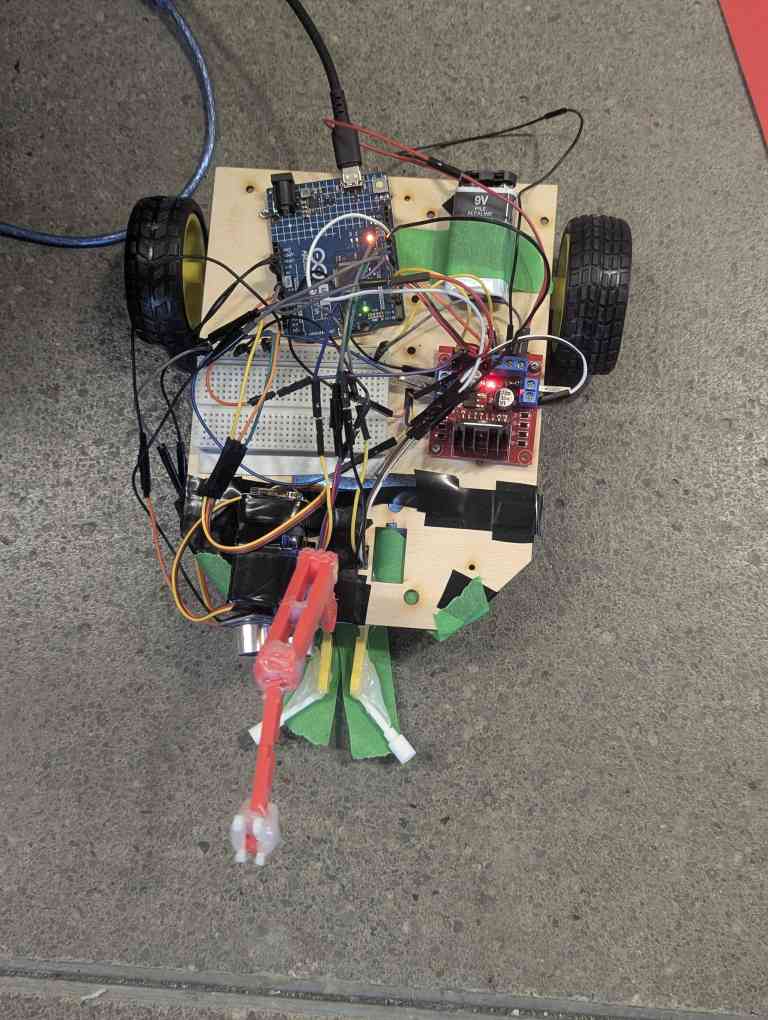
Top down view
-
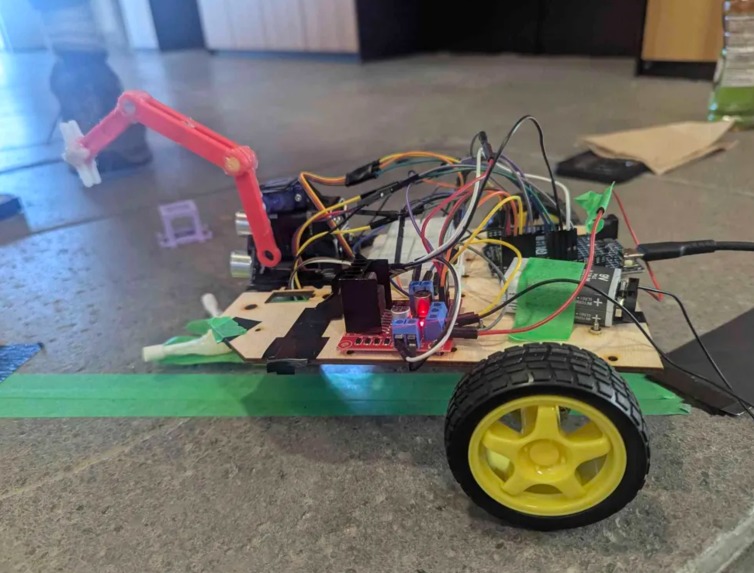
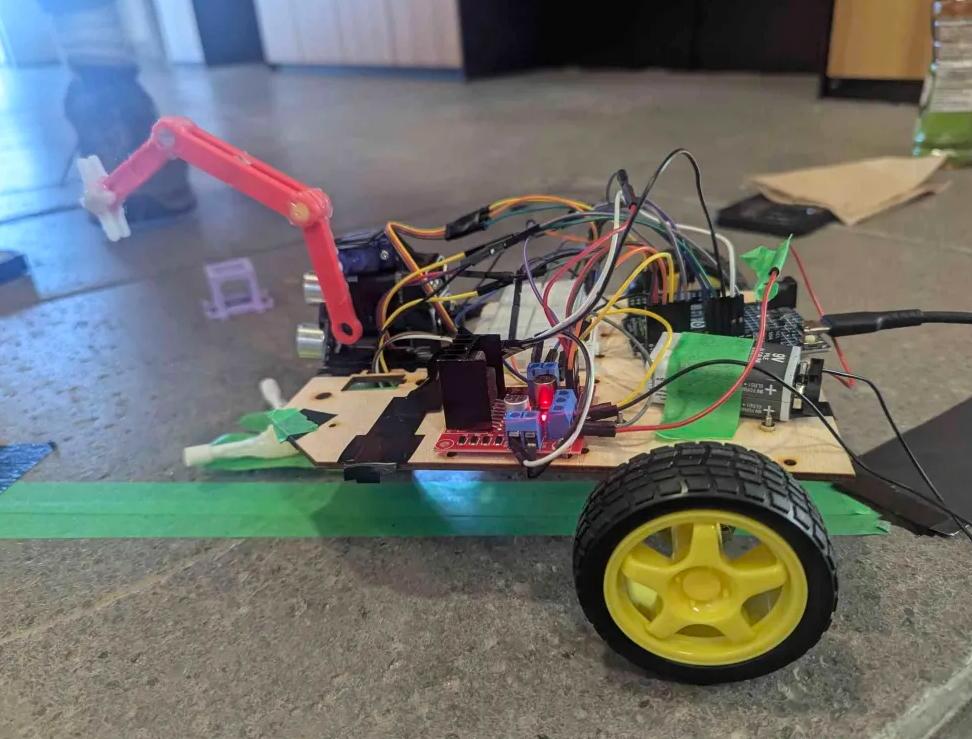
side view
Inspiration
We attended every workshop and event to learn as much as possible and gain inspiration for our robot. As it was a closed hardware competition, we weren't as creative as we would have wanted, but we did use our creativity to build certain components of our bot.
What it does
Our robot navigates the beginning of a race track and detects colour to kickstart its claw. It then picks up a box, turns around, and places the box down. It then moves forwards, towards the target area of the course. We have code for the remaining segments of the track but unfortunately did not have enough time to test and code it.
How we built it
Our team split into 2 groups of 2 and 1 floater who would help either team. For example, one team worked on the DC motors/wheels while another team worked on sensors and a floater teammate worked on the claw. We used GitHub to share our completed code for each hardware component and eventually put them all together after they all worked separately.
Challenges we ran into
When working with the wheels, the 3D printed components often snapped or broke and we had to have a runner go down to replace these parts constantly. We also had a difficult time visualizing the robots path through the track, and got to putting its full concept code together quite late. We began testing our robot extremely late and did not have enough time to troubleshoot. Additionally, our IR sensors did not detect red and green colored track lines. This was discovered extremely late and led to an abrupt pivot in our code as our movement was extremely dependent on these sensors.
Accomplishments that we're proud of
This hackathon is the first for all of our members and as high school students with limited hardware experience, we felt we were at a disadvantage at first. However, we ended up getting most hardware components to function and built a solid base/plan of code for the whole track (although we weren't able to test/debug it all in time). We are very content with our efforts and learning throughout this experience and we believe we were able to build a substantial project that was on track to work successfully.
What we learned
Aside from hard skills such as Arduino programming or hardware wiring, we also developed soft skills through this hackathon including communication, time management, teamwork, and organization. However, our most important lesson was to allocate more time to debugging and testing on the actual track. Our code and ideas seemed to work in theory but when it came to actually implementing everything, we ran into many issues. In the future, we believe it would be better to get a certain section of the track working and then move on to the next once it does. Using this strategy, it would be easier to get at least a portion of the track done instead of attempting to do all of it and running into endless issues.
What's next for UTRA hax 2026 team #57
Our team has learned a lot from this opportunity and we hope to attend similar events in the future. We will take our experiences from this event and use it to kickstart our journey!

Log in or sign up for Devpost to join the conversation.