This project was inspired by the challenge of building an autonomous system that could sense its environment and make real-time decisions, similar to how simple robotic platforms are used in industry and research. We began by dividing the project into smaller, manageable subsystems to improve efficiency and parallel development. We worked independently on tasks such as assembling the physical car, wiring and testing the DC motors with the motor driver, integrating the color and obstacle sensors, and developing the Arduino control logic. Once each subsystem was functional, we incrementally integrated them into a single system and tested interactions between hardware and software. Through this process, we learned the importance of modular design, calibration, and debugging embedded systems, particularly how sensor thresholds and motor timing must be experimentally tuned. Overall, this project strengthened our understanding of Arduino systems and integrating it with various sensors, teamwork, and practical problem-solving in robotics.
Inspiration
Our parents; Learning to integrate different components of the project.
What it does
Completes the obstacle course by detecting the colors on the ground.
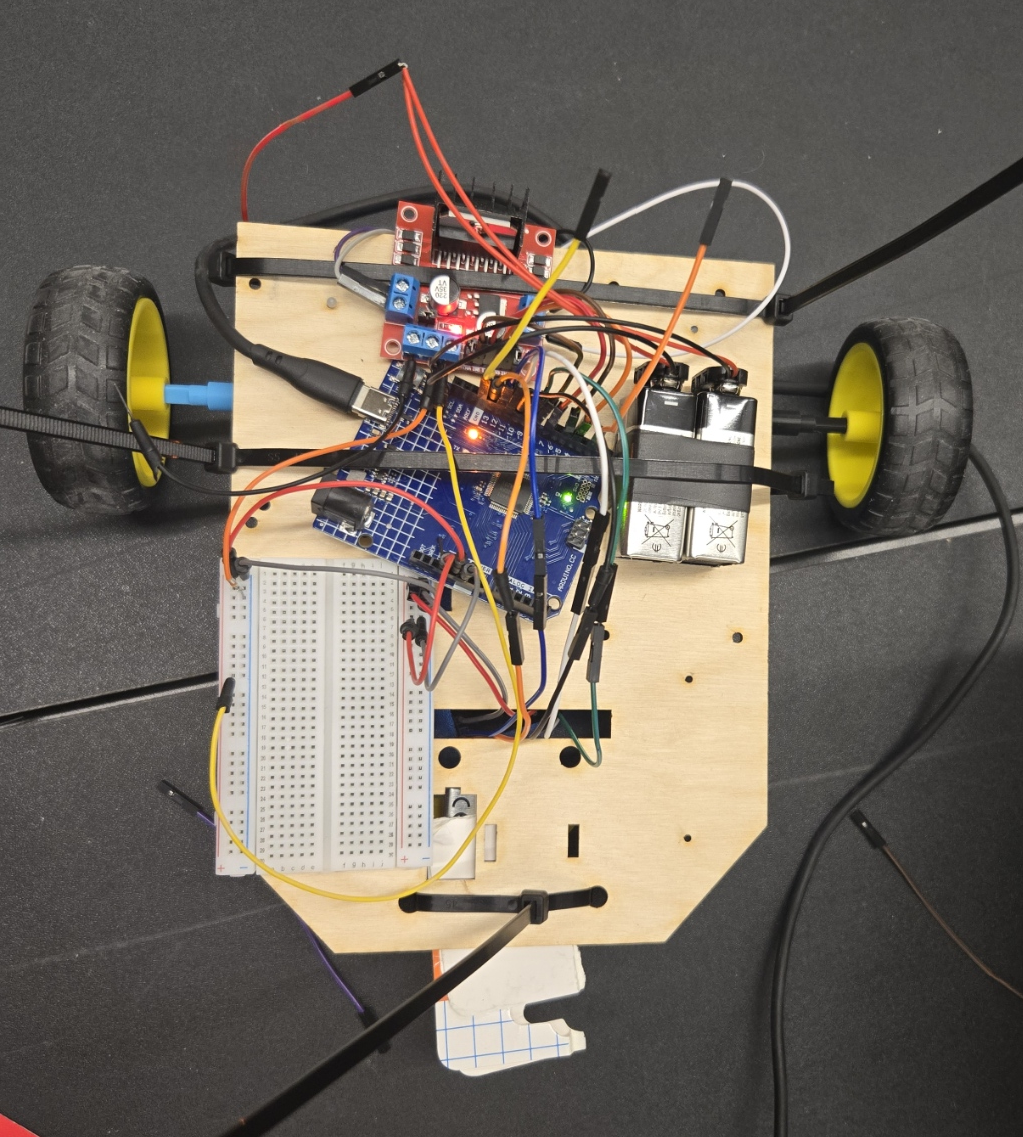
How we built it
using wires arduino and code
Challenges we ran into
breaking axles and integrating different components for the car to run smoothly.
Accomplishments that we're proud of
Breaking too many axles
What we learned
avoid obstacles and start the integration part a bit earlieir.
What's next for UTRA Hacks Team 61
Do the best possible


Log in or sign up for Devpost to join the conversation.