BEETLE: Autonomous Robot for UTRA Hacks 2025
Inspiration:
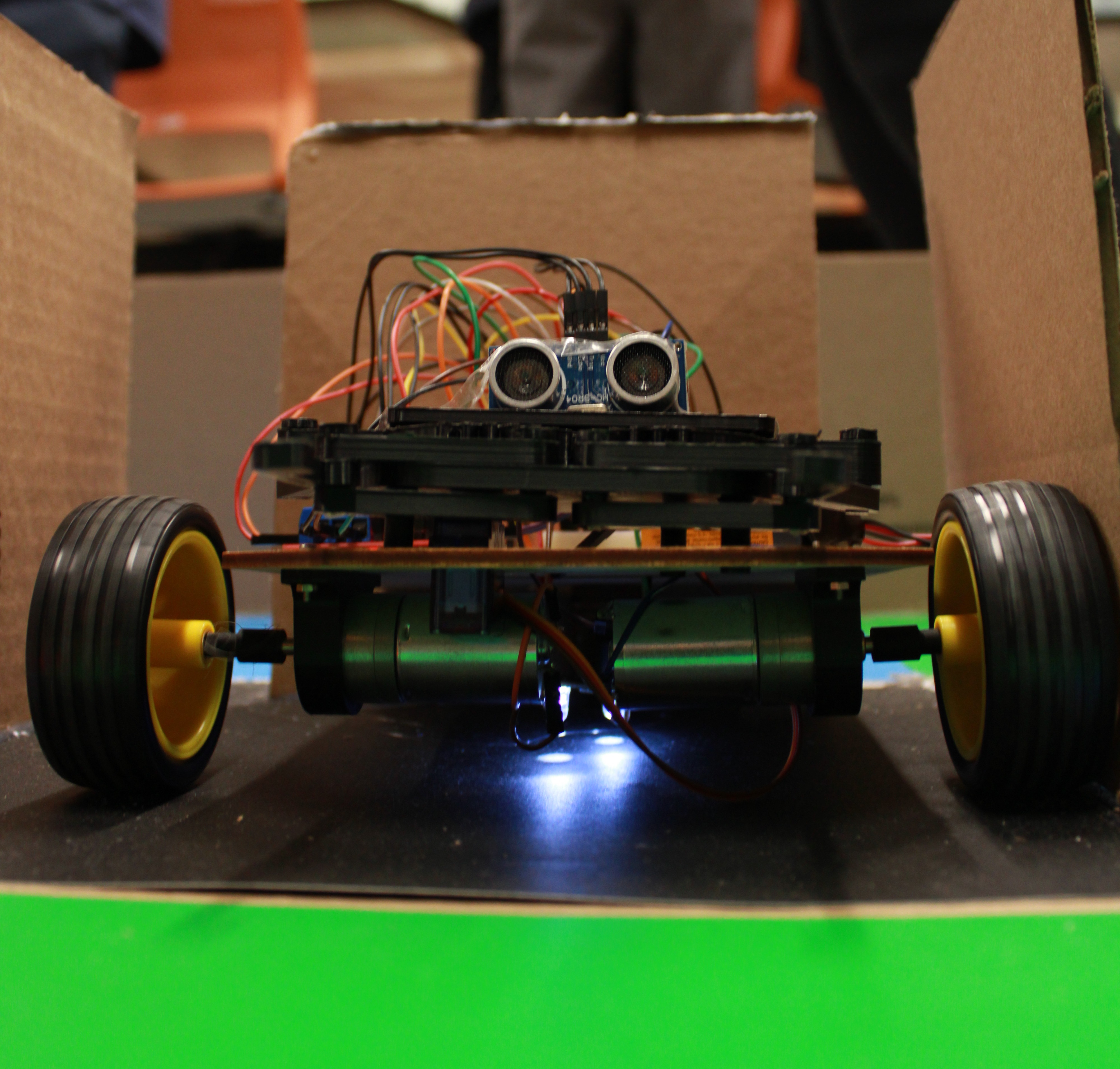
Our goal was to design an autonomous robot capable of navigating its environment, detecting walls, and responding to coloured floor tiles. This project allowed us to explore robotics, sensor integration, and real-time problem solving.
What it does:
BEETLE can:
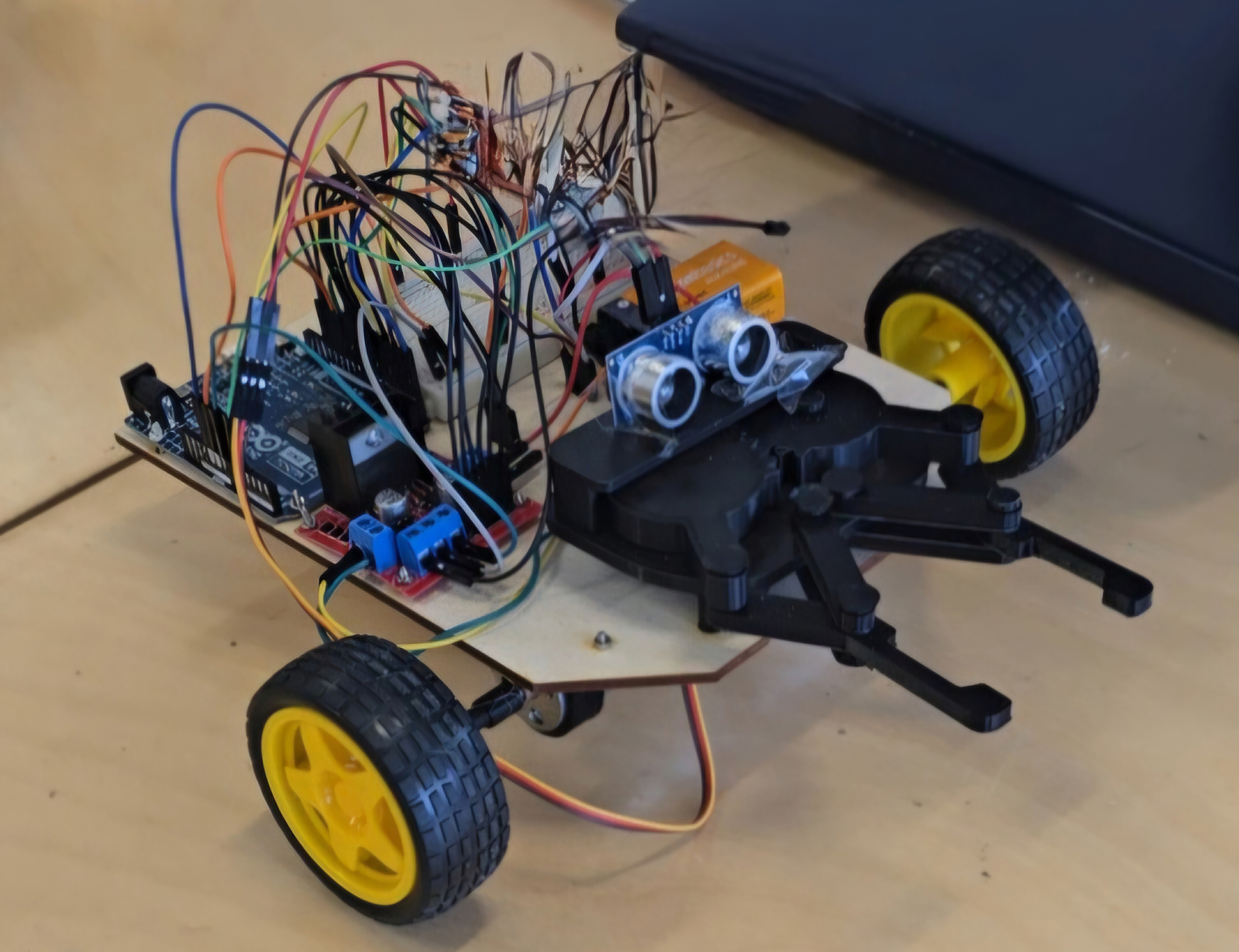
Move forward autonomously, controlled by an Arduino Uno R4. Detect and respond to coloured floor tiles to perform specific tasks. Use ultrasonic sensors to detect and avoid obstacles like walls.
How we built it:
We used an Arduino Uno R4 to program the robot’s movements, integrating it with ultrasonic and colour sensors to help it sense its surroundings. Custom-designed 3D-printed parts were used to house and position the sensors and motors, ensuring stability and mobility.
Challenges we ran into:
Defective components caused errors and delays in our work, requiring us to troubleshoot and fix problems on the fly. Sensor calibration was tricky, particularly with the ultrasonic and colour sensors, which had to work together seamlessly.
Accomplishments we're proud of:
We successfully got BEETLE to:
Move forward autonomously. Stop precisely when needed based on sensor feedback.
What we learned:
Gained hands-on experience with hardware-software integration. Learned how to calibrate sensors for real-time navigation. Developed problem-solving skills under time pressure, especially when dealing with defective parts.
What's next for BEETLE:
We plan to:
Enhance BEETLE’s ability to identify and respond to multiple colours. Improve its navigation algorithms for smoother movement and better obstacle avoidance. Add more advanced features, such as improved sensor integration and communication.


Log in or sign up for Devpost to join the conversation.