-
-
Introduction
-
Code
-
Engineering
-
Results
Inspiration
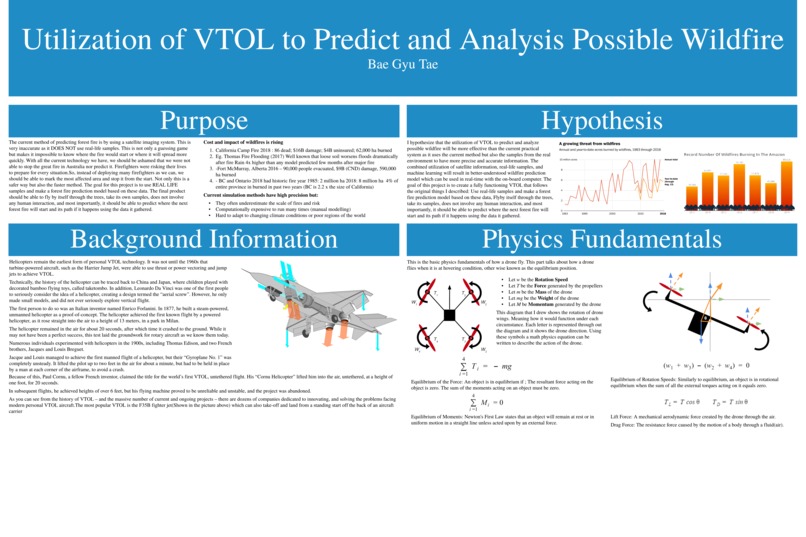
The current method of predicting forest fire is by using a satellite imaging system. This is very inaccurate as it DOES NOT use real-life samples. This is not only a guessing game but makes it impossible to know where the fire would start or where it will spread more quickly. With all the current technology we have, we should be ashamed that we were not able to stop the great fire in Australia nor predict it. Firefighters were risking their lives to prepare for every situation.So, instead of deploying many firefighters as we can, we should be able to mark the most affected area and stop it from the start. Not only this is a safer way but also a faster method. The goal for this project is to use REAL LIFE samples and make a forest fire prediction model based on these data. The final product should be able to fly by itself through the trees, take its own samples, does not involve any human interaction, and most importantly, it should be able to predict where the next forest fire will start and its path if it happens using the data it gathered.
What was the problem?
Cost and impact of wildfires is rising California Camp Fire 2018 : 86 dead; $16B damage; $4B uninsured; 62,000 ha burned Eg. Thomas Fire Flooding (2017) Well known that loose soil worsens floods dramatically after fire Rain 4x higher than any model predicted few months after a major fire -Fort McMurray, Alberta 2016 – 90,000 people evacuated, $9B (CND) damage, 590,000 ha burned
- BC and Ontario 2018 had historic fire year 1985: 2 million ha 2018: 8 million ha 4% of the entire province in burned in the past two years (BC is 2.2 x the size of California) Current simulation methods have high precision but: They often underestimate the scale of fires and risk Computationally expensive to run many times (manual modeling) Hard to adapt to changing climate conditions or poor regions of the world
What it does
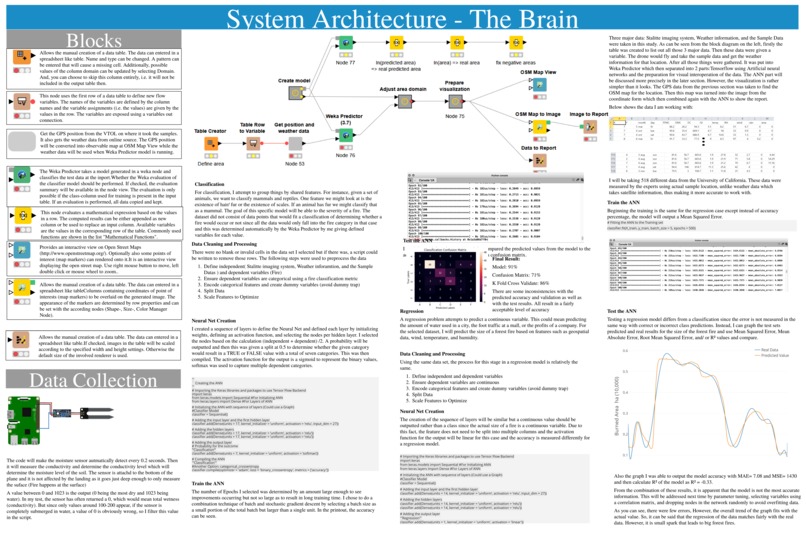
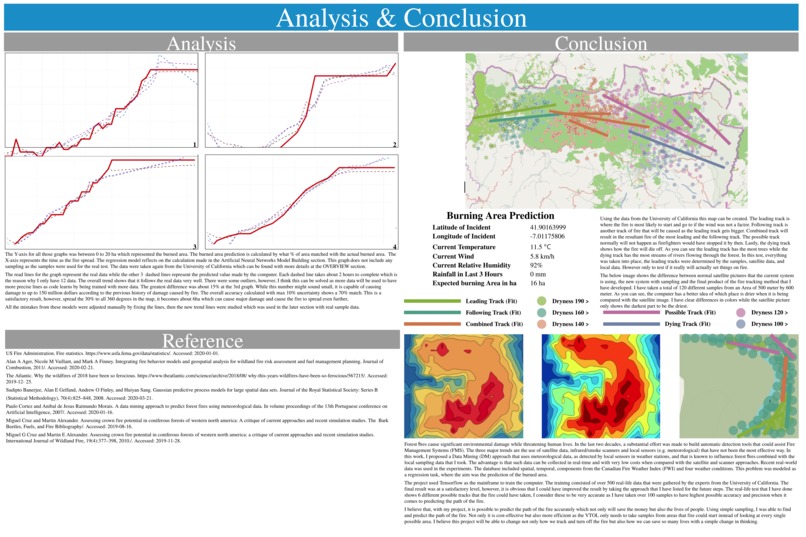
I hypothesize that the utilization of VTOL to predict and analyze possible wildfire will be more effective than the current practical system as it uses the current method but also the samples from the real environment to have more precise and accurate information. The combined utilization of satellite information, real-life samples, and machine learning will result in a better-understood wildfire prediction model which can be used in real-time with the on-board computer. The goal of this project is to create a fully functioning VTOL that follows the original things I described: Use real-life samples and make a forest fire prediction model based on these data, Flyby itself through the trees, take its samples, does not involve any human interaction, and most importantly, it should be able to predict where the next forest fire will start and its path if it happens using the data it gathered.
What plane is it and how does it work?
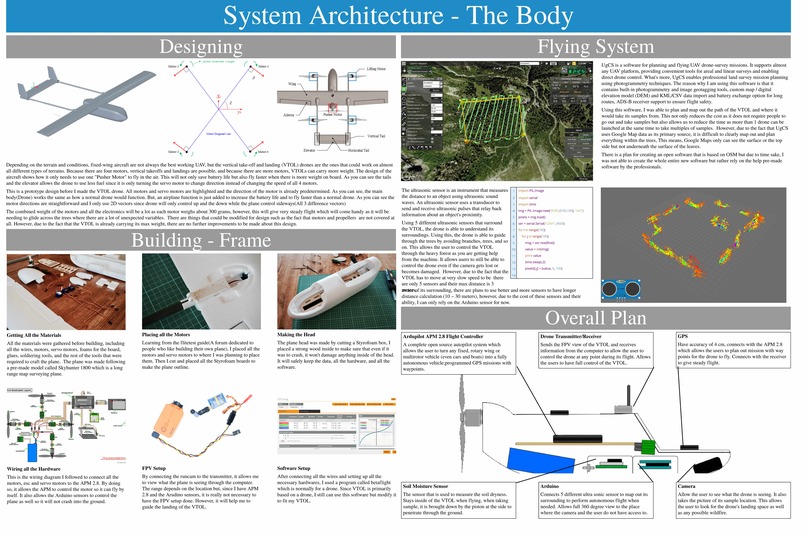
Depending on the terrain and conditions, fixed-wing aircraft are not always the best working UAV, but the vertical take-off and landing (VTOL) drones are the ones that could work on almost all different types of terrains. Because there are four motors, vertical takeoffs and landings are possible, and because there are more motors, VTOLs can carry more weight. The design of the aircraft shows how it only needs to use one "Pusher Motor" to fly in the air. This will not only save battery life but also fly faster when there is more weight on board. As you can see the tails and the elevator allows the drone to use less fuel since it is only turning the servo motor to change direction instead of changing the speed of all 4 motors.
The steps of building the plane
All the materials were gathered before building, including all the wires, motors, servo motors, foams for the board, glues, soldering tools, and the rest of the tools that were required to craft the plane. The plane was made following a pre-made model called Skyhunter 1800 which is a long-range map surveying plane. Learning from the flitetest guide(A forum dedicated to people who like building their own plane), I placed all the motors and servo motors to where I was planning to place them. Then I cut and placed all the Styrofoam boards to make the plane outline. The plane head was made by cutting a Styrofoam box, I placed a strong wood inside to make sure that even if it was to crash, it won't damage anything inside of the head. It will safely keep the data, all the hardware, and all the software. I followed the wiring diagram from one of the pictures below to connect all the motors, esc and servo motors to the APM 2.8. By doing so, it allows the APM to control the motor so it can fly by itself. It also allows the Arduino sensors to control the plane as well so it will not crash into the ground. By connecting the runcam to the transmitter, it allows me to view what the plane is seeing through the computer. The range depends on the location but, since I have APM 2.8 and the Arduino sensors, it is really not necessary to have the FPV setup done. However, it will help me to guide the landing of the VTOL. After connecting all the wires and setting up all the necessary hardware, I used a program called betaflight which is normally for a drone. Since VTOL is primarily based on a drone, I still can use this software but modify it to fit my VTOL.
Challenges I ran into
Well, one of the biggest problems that I had was getting all the money for this project. As a high school student, I do not have many choices as I would if I was an adult. Being so, I have worked on different part-time jobs such as math tutor in order to gain all the funds for this project. As for hardware and software, all the information I need is on books, youtube, and most importantly Google! I also like to mention IEEE for helping me with this project by donating a small funds to cover 25%of my project!
Accomplishments that I'm proud of
I loved the fact that I got to work on something big like this! Due to the situation, I had much free time from school and this allowed me to dig into my own interest which inspired me to plan, start, and finish this project for this hackathon! I have learned a lot from this project, I learned how to make a plane that can fly by itself and a code that uses the given information to predict the future!
What's next for Utilizing VTOL to Predict and Analysis Possible Wildfire
Feature Evaluation and Dimensionality Reduction When building models, I did not take into account the statistical significance of each parameter. Instead, I simply chose to include all independent variables. The first method of improving the model is to determine and only use the features which are most statistically significant to the independent variable(s). Methods Backward Elimination A feature selection technique while building a machine learning model. It is used to remove those features that do not have a significant effect on the dependent variable or prediction of output. Forward Selection A type of stepwise regression which begins with an empty model and adds in variables one by one. In each forward step, you add the one variable that gives the single best improvement to my model. Bidirectional Elimination (stepwise) A forward selection procedure but with the possibility of deleting a selected variable at each stage, as in the backward elimination, when there are correlations between variables. It is often used as a default approach. With all of these improvements, I believe it could increase the accuracy of up to 85%(Each one being about 5% from small sample tests). This could be a major improvement as it is reducing a lot of burned areas. However, this will require way more time as I need to be very precise with the variables and the machine will take a longer time to process all this new information with new types of data. I would also love to work with the UN as they have more accurate data of maps for their search and rescue team for national parks. Using these data, I would be able to train the model to learn more about different types of data.
I would also love to work with any organization to improve my project!
Built With
- artificial
- classification
- machine-learning
- network
- neural
- weka


Log in or sign up for Devpost to join the conversation.