-
-

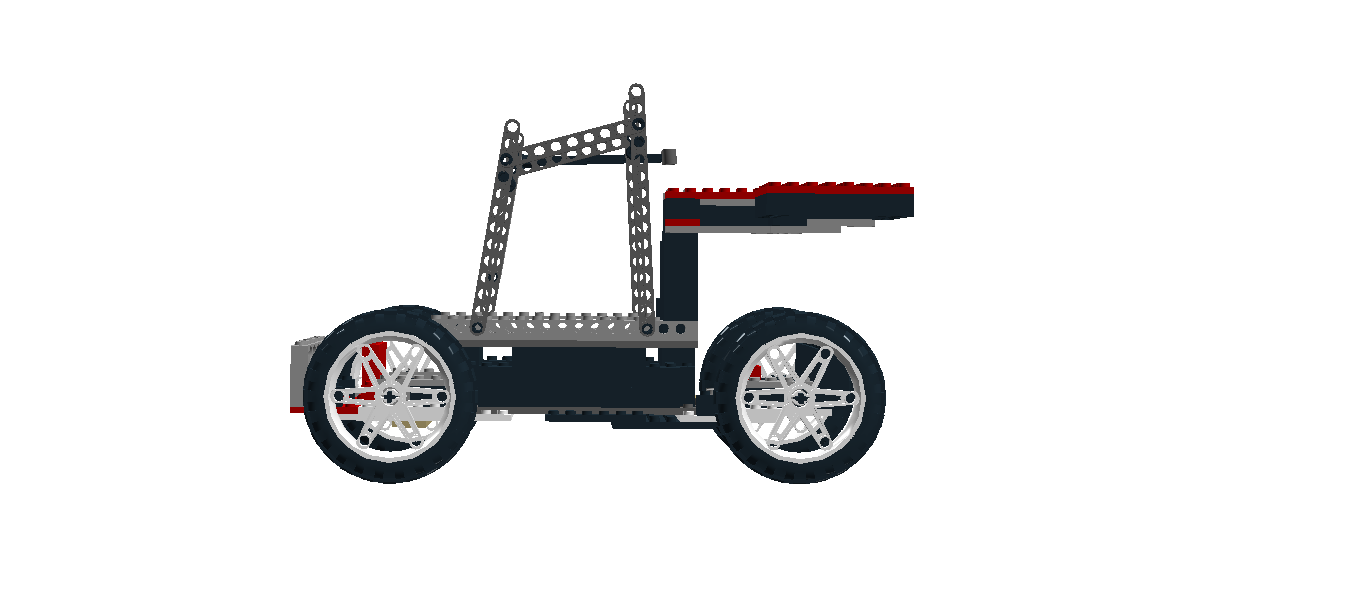
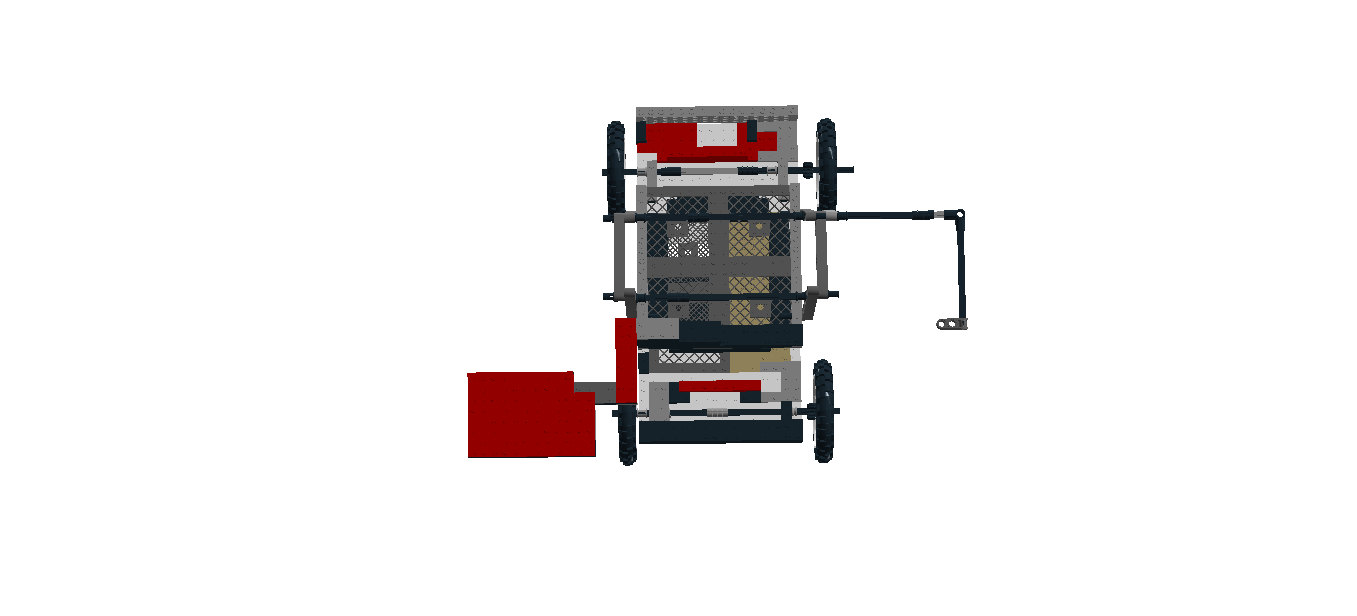
Most detailed side
-
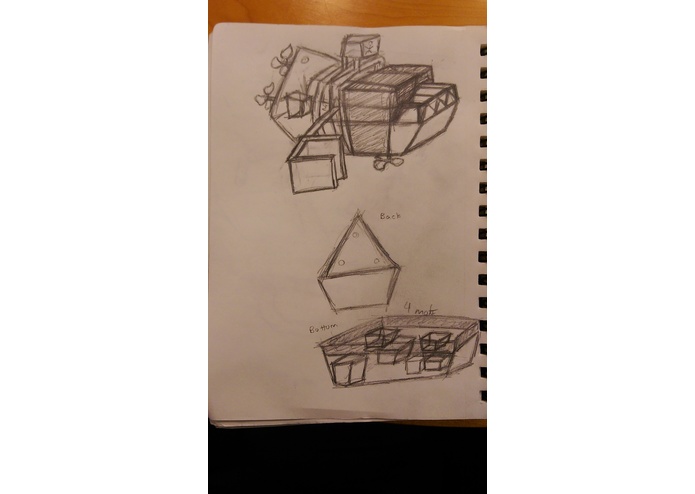
New hybrid sketch
-

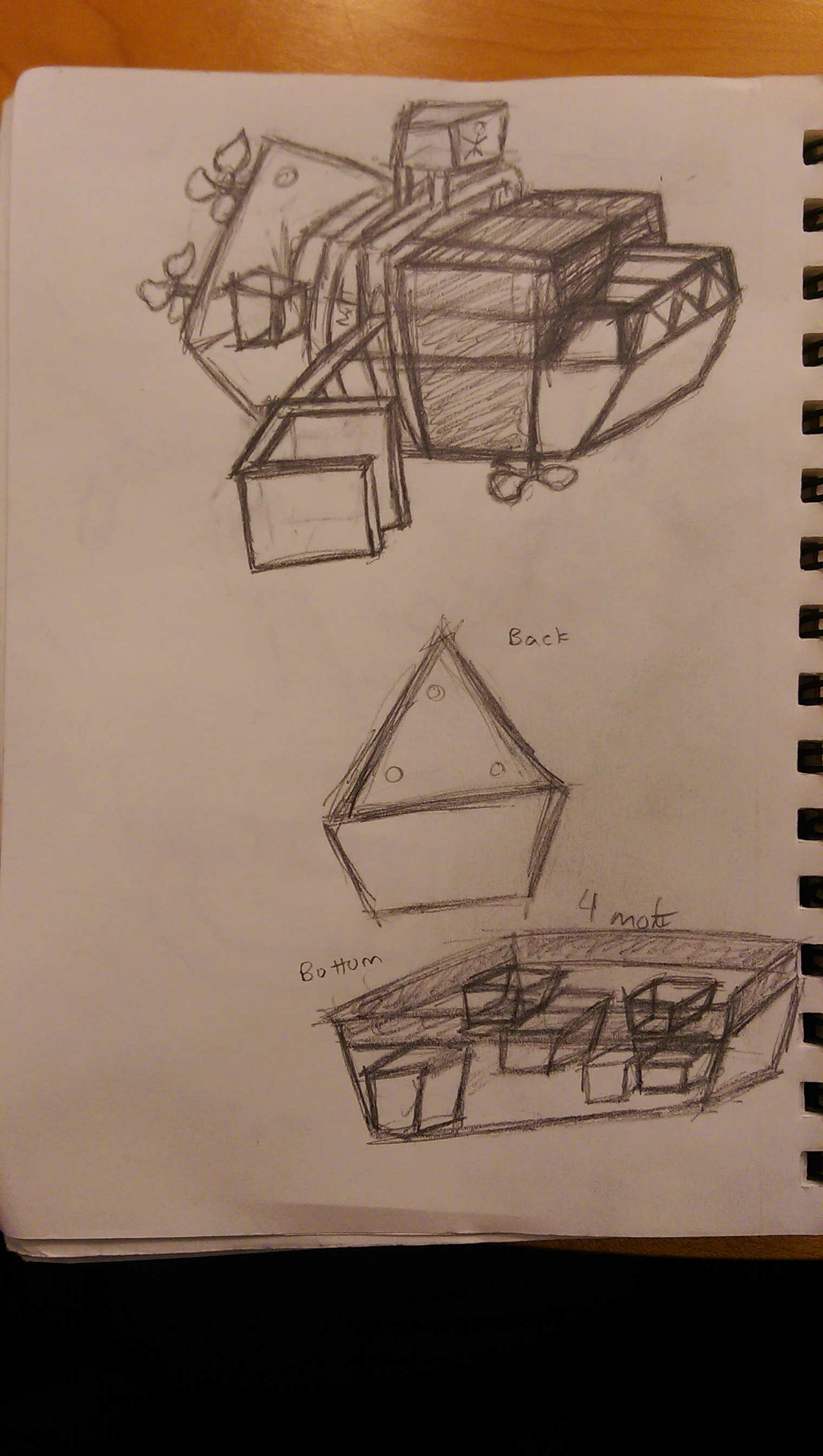
Top view
-
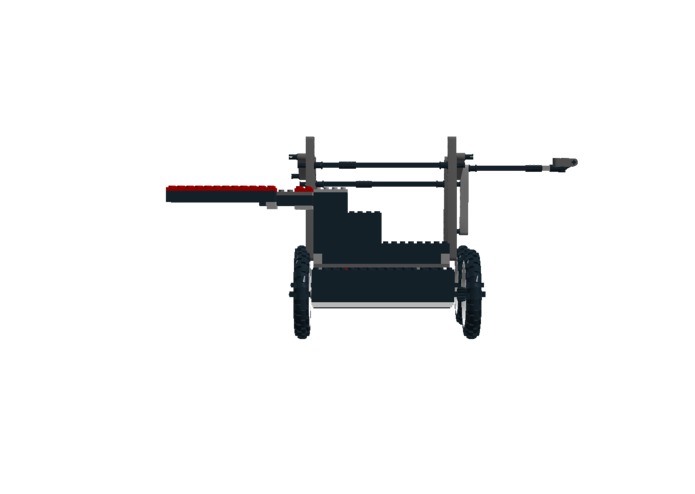
Front view
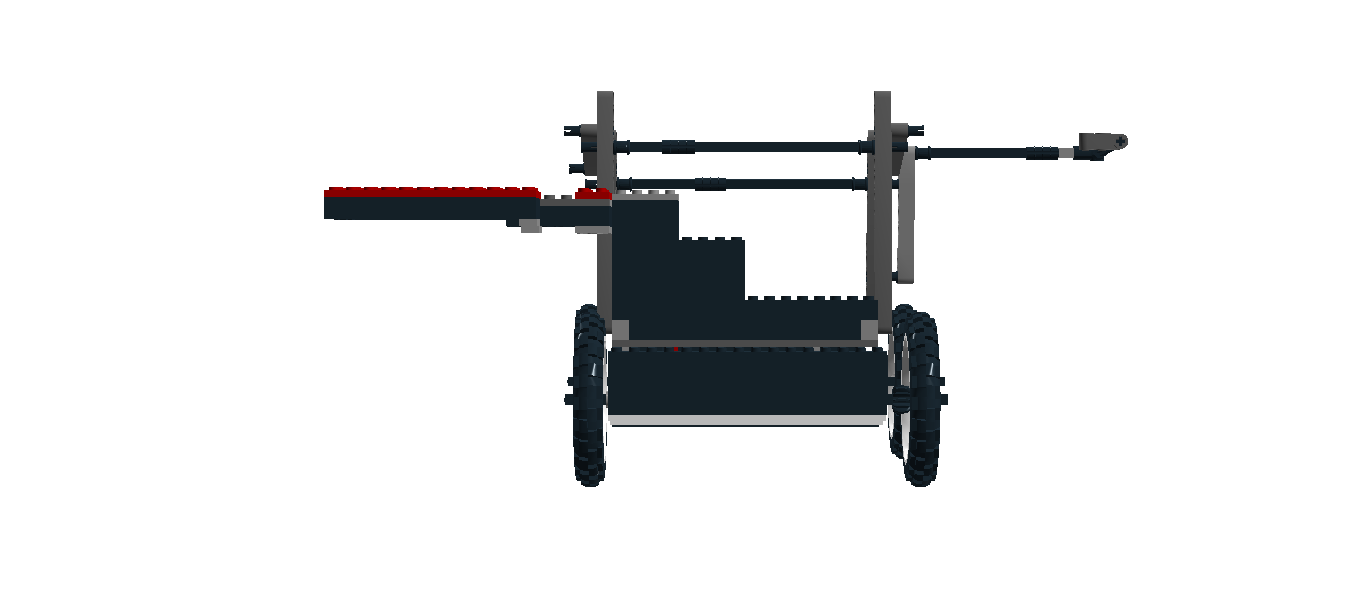
Inspiration
This robot was built for my Introduction to General Engineering course. There were many on land rovers to choose form, only one underwater rover. The underwater rover was the most challenging and I figured if I'm going to build a robot why not go for the hardest one?
What it does
The underwater robot runs an obstacle course which is suppose to simulate possible real life applications. For example stopping an oil spill, transporting items, retrieving items, etc.
How I built it
This robot was built using a lego Mindstorms kit and a waterproof NXT. After exploring the different ways the robot can go using the lego pieces, a sketch of a robot design was created and then built/tested. There was a lot of pivoting and alterations as this robot was being built.
Challenges I ran into
Initially, the idea was to have a hybrid underwater robot. The robot would be balanced in the middle of the water almost like a submarine but there were issues with the buoyant force.
After changing the robot into a rover underwater robot, the rover posed its own challenges. Tire pressure, weight, and buoyant force (yes, it came back again! No escaping it underwater) were all problematic.
During early trials the weight of the rover would fluctuate between being so heavy the wheels were crushed to being light enough to be overpowered by the buoyant force causing the wheel to lose grip of the bottom of the tank.
Testing the robot when the weather started to get colder due to the water being cold and having to plunge our arms into and out of the water to place and remove the bot.
Accomplishments that I'm proud of
Successfully building a robot that run its course.
What I learned
Identify mistakes soon and pivot often.
Built With
- lego
- mindstorms

Log in or sign up for Devpost to join the conversation.