🌿 Sprinkify — AI-Optimized Irrigation That Waters What Matters
🧠 Inspiration / Problem
Conventional campus and city sprinklers waste massive amounts of water:
- 🚿 Overspray: sprinklers water sidewalks, buildings, and pedestrians.
- 💧 Overlap waste: multiple sprinklers redundantly cover the same spots.
- 🕒 Rigid schedules: timers don’t adapt to lawn shapes or weather.
This leads to water waste, poor efficiency, and negative user experience — a serious issue in cities and campuses trying to conserve water.
💡 What It Does
Sprinkify is an AI-powered irrigation assistant that:
- Accepts text descriptions (via Gemini LLM) or images / aerial footage (via ML + OpenCV) to generate GeoJSON lawn layouts with sprinkler positions.
- Runs an optimizer (CP-SAT solver + PPO reinforcement learning agent) to generate efficient sprinkler rotation + flow patterns.
- Produces simulation heatmaps, MATLAB-powered visualizations, and drives real hardware (servo motors + pumps) to execute the plan.
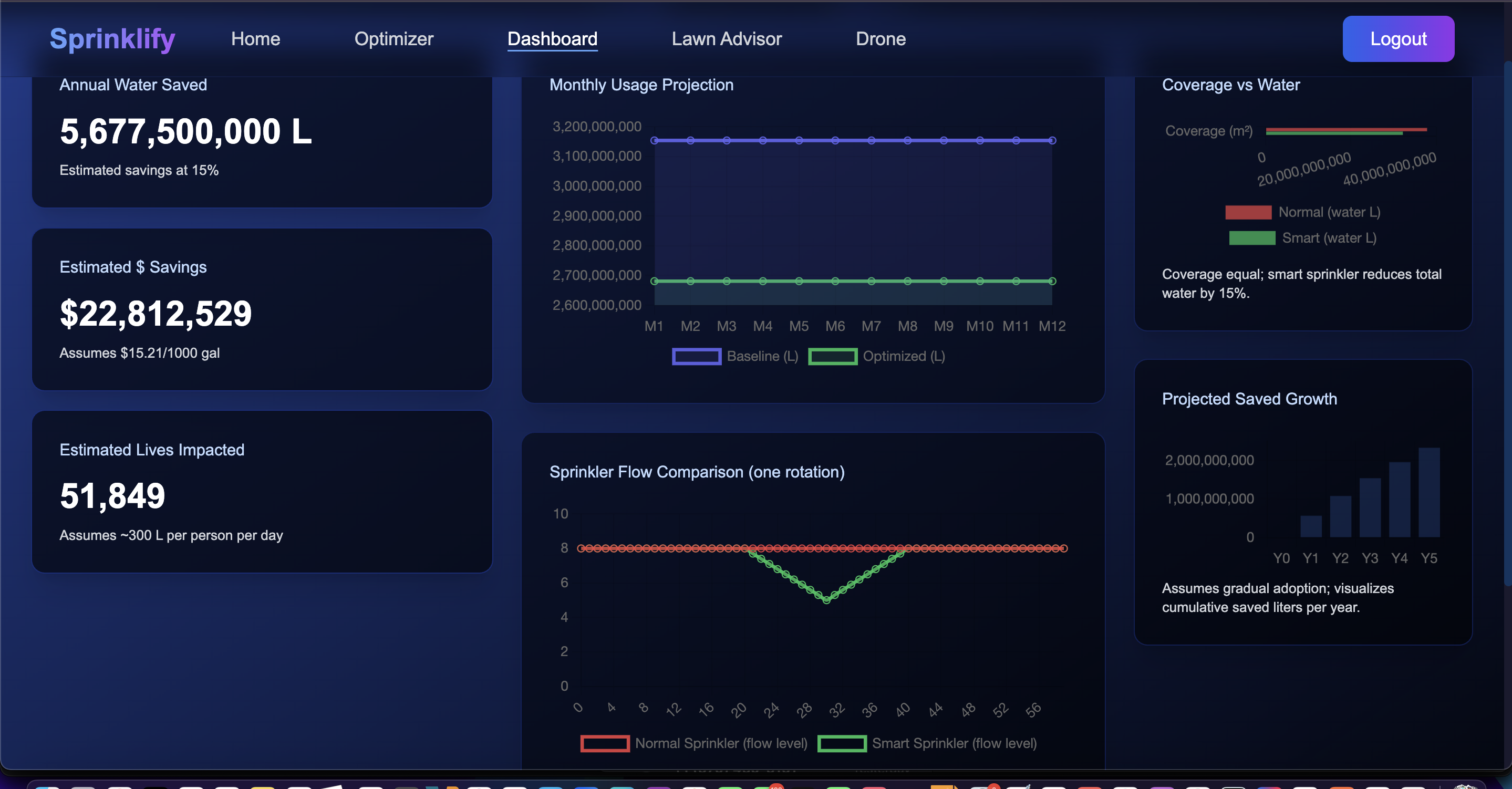
- Offers a React + Tailwind dashboard with chatbot interface, multilingual support, and analytics.
- Uses Spring Boot for secure orchestration and Flask for ML/image processing.
👉 The result: maximum coverage, minimum waste, and real-time synchronized sprinkler control.
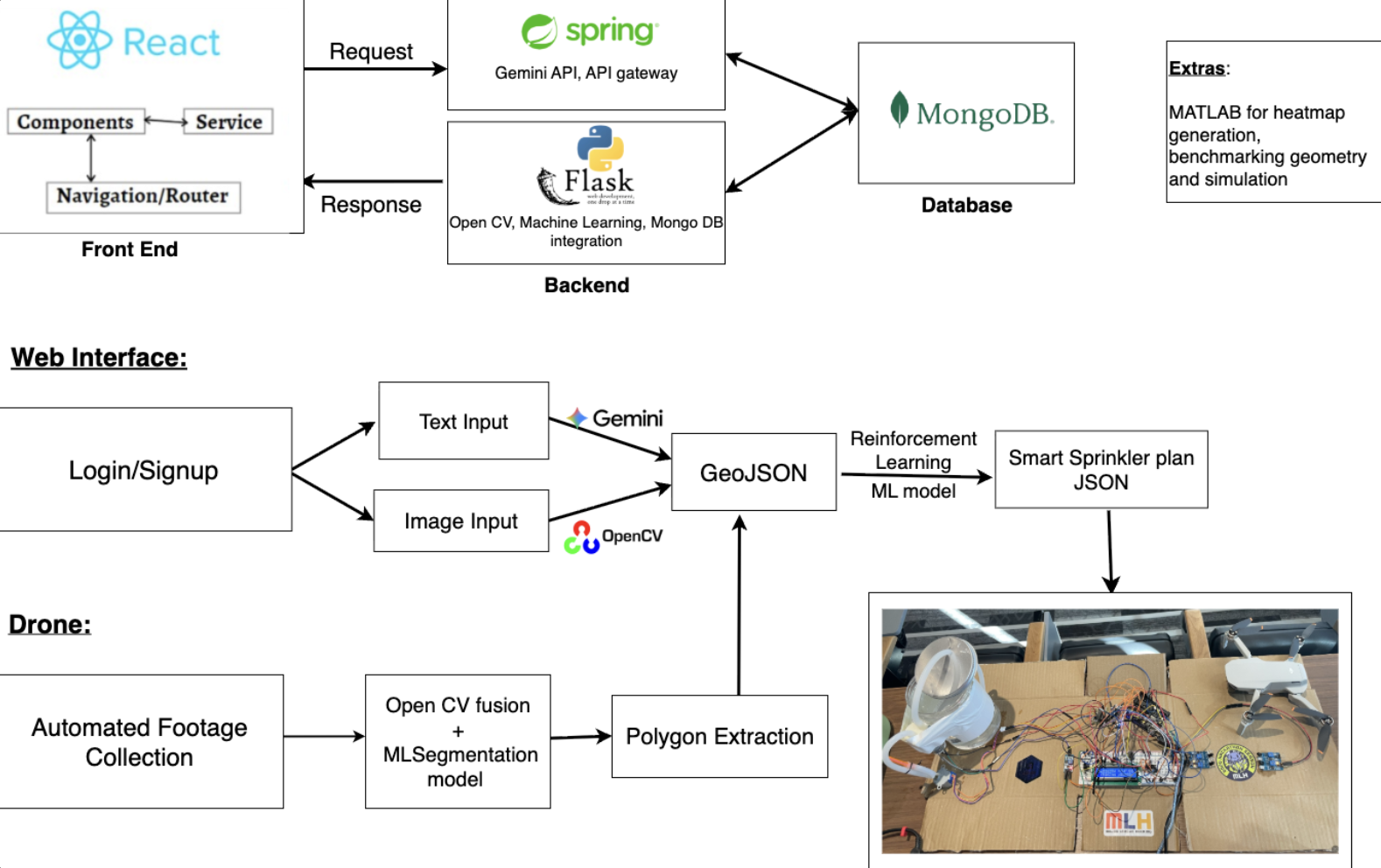
🏗️ System Architecture
🖥️ Frontend (React + Tailwind + Konva)
- Chatbot UI (Gemini agents: Designer, Personal Advisor, Eco-Optimizer)
- Image & drone footage uploader
- Lawn editor + simulation viewer
☁️ Backend Layer 1 — Spring Boot (Java)
- API gateway
- Hosts chatbot orchestration
- Uses Gemini API for text → GeoJSON parsing & explanations
🧠 Backend Layer 2 — Flask (Python)
- Image processing (OpenCV + Shapely):
- HSV green segmentation → lawn polygons
- Contour extraction → Shapely polygons (scaled to real units)
- HoughCircles → sprinkler positions
- HSV green segmentation → lawn polygons
- Optimizer:
- OR-Tools CP-SAT solver (deterministic)
- PPO RL agent (learning-based)
- OR-Tools CP-SAT solver (deterministic)
- Simulation Renderer:
- Generates coverage heatmaps & MP4 animations
- Generates coverage heatmaps & MP4 animations
🗄️ Database — MongoDB Atlas
- Stores users, lawns, sprinklers, GeoJSON, optimization plans, simulation runs, device telemetry
🧩 Feature Breakdown
🌿 Feature A — Text → Lawn (Gemini LLM, NLP)
- User enters natural language (e.g., “5m wide, 7m long lawn with rounded edges…”)
- Gemini extracts shape, size, sprinkler placements
- Regex + spaCy validation layer ensures units and geometry are consistent
- Stored as GeoJSON in MongoDB
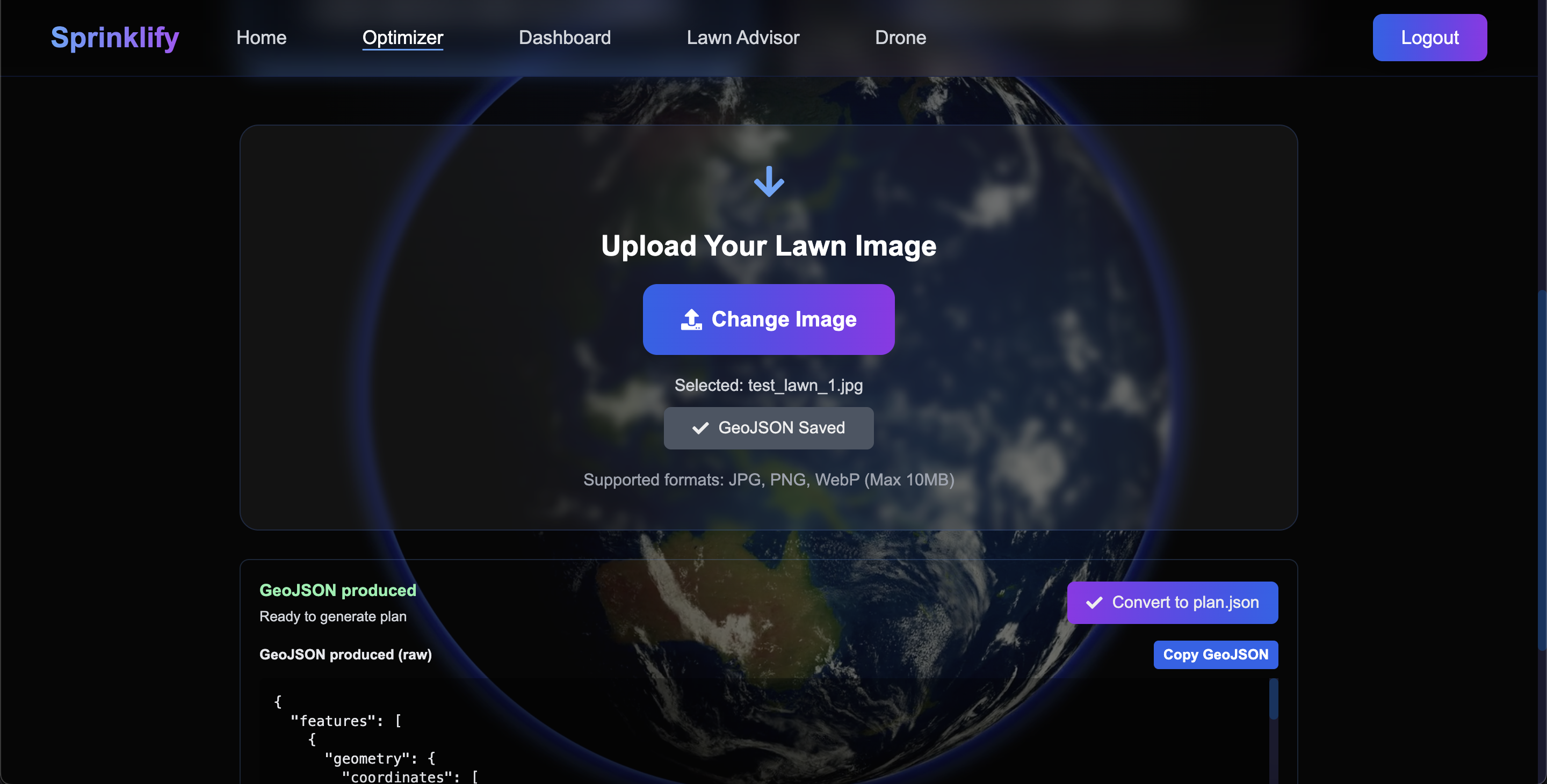
🖼️ Feature B — Image/Drone → Lawn (CV)
- HSV threshold green → lawn
- OpenCV contours → polygons (Shapely)
- Threshold blue + HoughCircles → sprinklers
- Scale to real units → GeoJSON
- Great for both uploaded photos and drone footage (DJI Mini 3 4K) to map irregular lawns automatically.
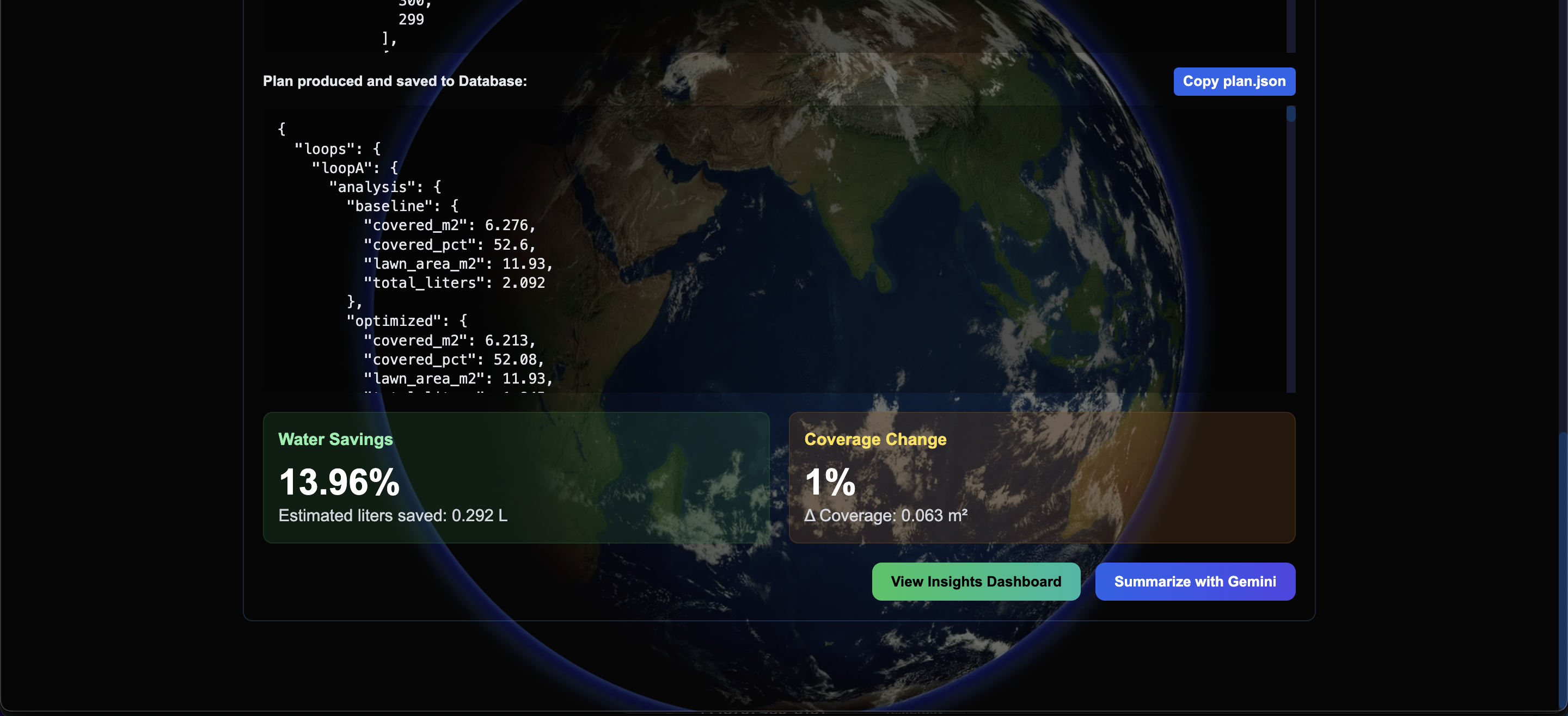
🧮 Feature C — GeoJSON → Optimized Plan
Solver Path (OR-Tools):
- Rasterize lawn, precompute spray kernels
- Solve scheduling with CP-SAT → minimize overspray + water use
- Rasterize lawn, precompute spray kernels
Learning Path (PPO):
- RL agent learns rotation/flow control over simulated lawns
- Adaptable to new shapes without retraining
- RL agent learns rotation/flow control over simulated lawns
Hybrid Mode:
- Seed solver with RL output for optimal + feasible schedules.
- Seed solver with RL output for optimal + feasible schedules.
Output: JSON rotation & flow instructions per sprinkler.
🌐 Feature F — Database & Data Management
- All structured data stored in MongoDB: users, GeoJSON, optimization results, telemetry, MATLAB outputs.
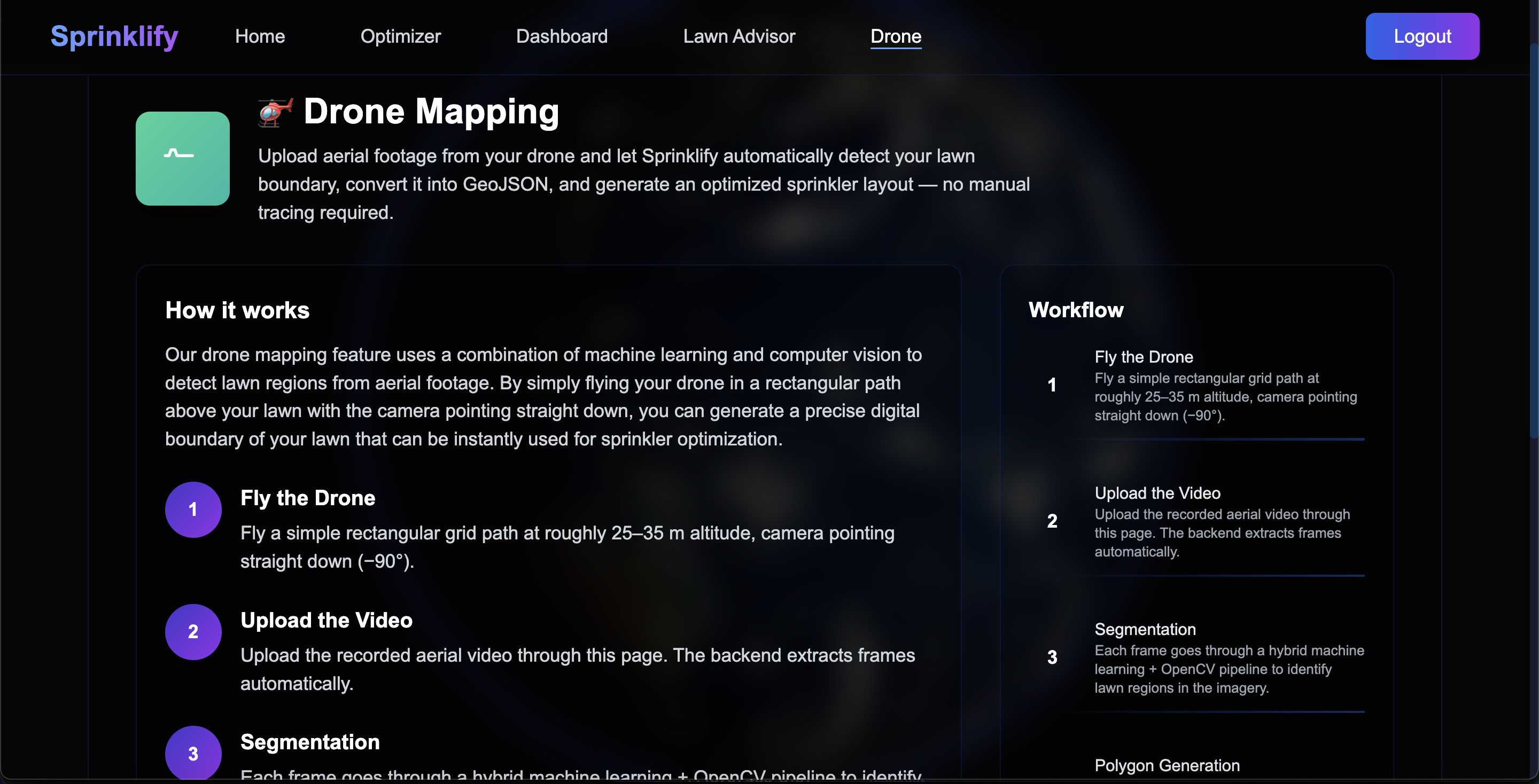
🚁 Drone → GeoJSON Feature
We use DJI Mini 3 (4K) drone to capture aerial footage.
Flask runs an OpenCV segmentation + contour pipeline to extract real-world polygons and generate GeoJSON, even for complex or snake-shaped lawns.
👉 This makes Sprinkify scalable for campus-sized mapping.
📊 MATLAB Integrations
8️⃣ Coverage Heatmap Generation
- MATLAB simulates water coverage over 2D grid (GeoJSON + sprinklers)
- Produces coverage matrices + heatmap PNGs for the dashboard.
9️⃣ Optimizer Benchmarking
- Run MATLAB Optimization Toolbox (
fmincon,ga) - Compare solutions from OR-Tools, PPO RL, and MATLAB solver.
🔟 Geometric Preprocessing & Shape Analysis
- Convex hull, perimeter, area, polygon decomposition
- Used for heuristic sprinkler placement and lawn grid preparation.
1️⃣1️⃣ Simulation Playback Generation
- MATLAB animates sprinklers over time (angles, flows)
- Generates MP4 with
VideoWriter→ displayed in React dashboard.
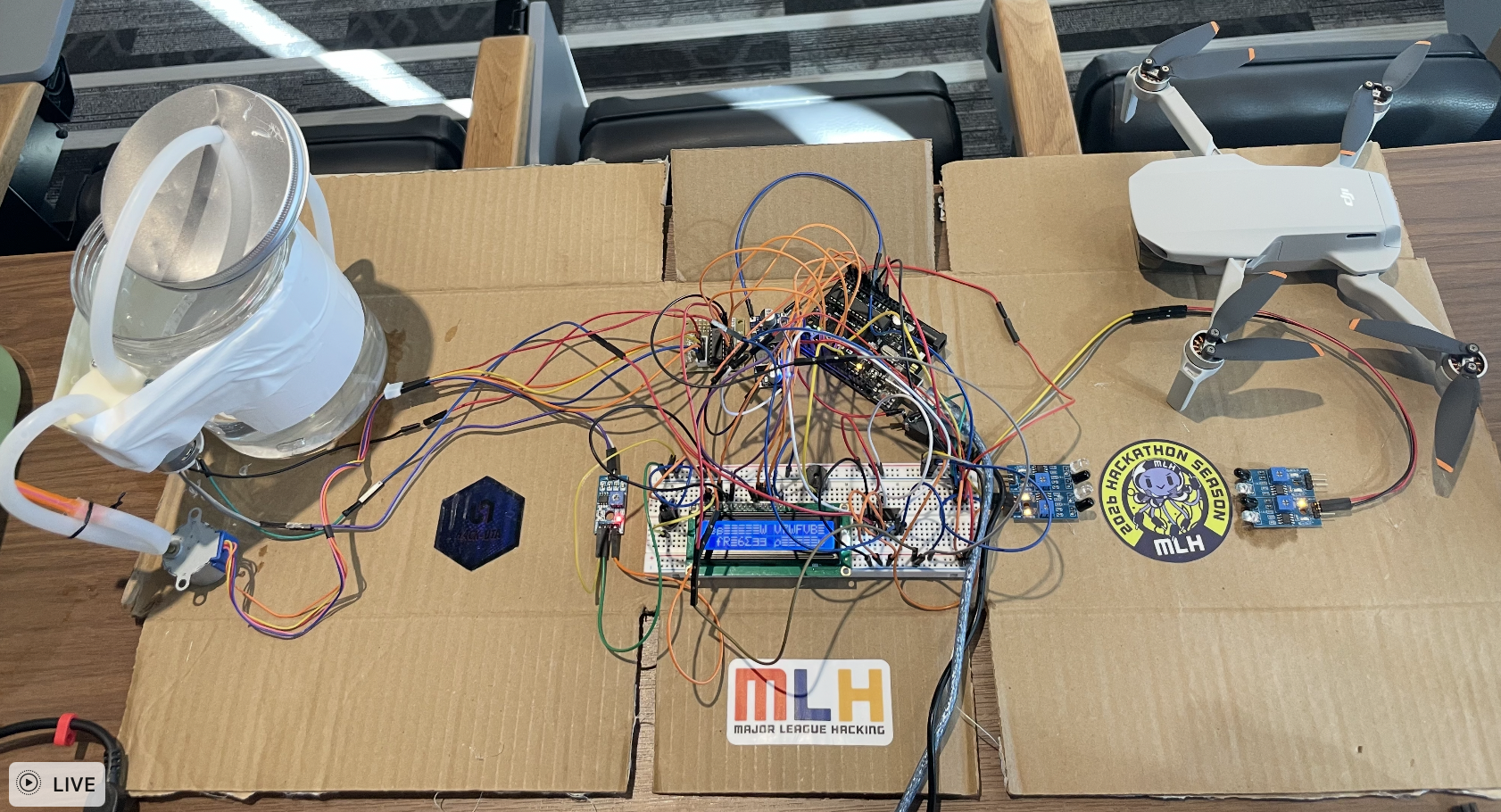
🤖 Hardware Build
A mini irrigation controller built on Arduino-class hardware:
| Component | Function |
|---|---|
| Elegoo Uno R3 | Microcontroller |
| 16×2 LCD | Status display |
| 28BYJ-48 stepper + ULN2003 | Sprinkler rotation |
| L293D H-bridge + DC pump | Variable flow control |
| IR tripwire sensor | Stops watering if beam is broken |
| Analog soil moisture sensor | Monitors soil hydration |
| Buzzer | Alerts |
| 5 V buck converter | Power regulation |
👉 Receives rotation/flow instructions from backend → executes real synchronized patterns.
👉 Displays status on LCD, stops on sensor break, logs moisture — all while rotating like a real sprinkler.
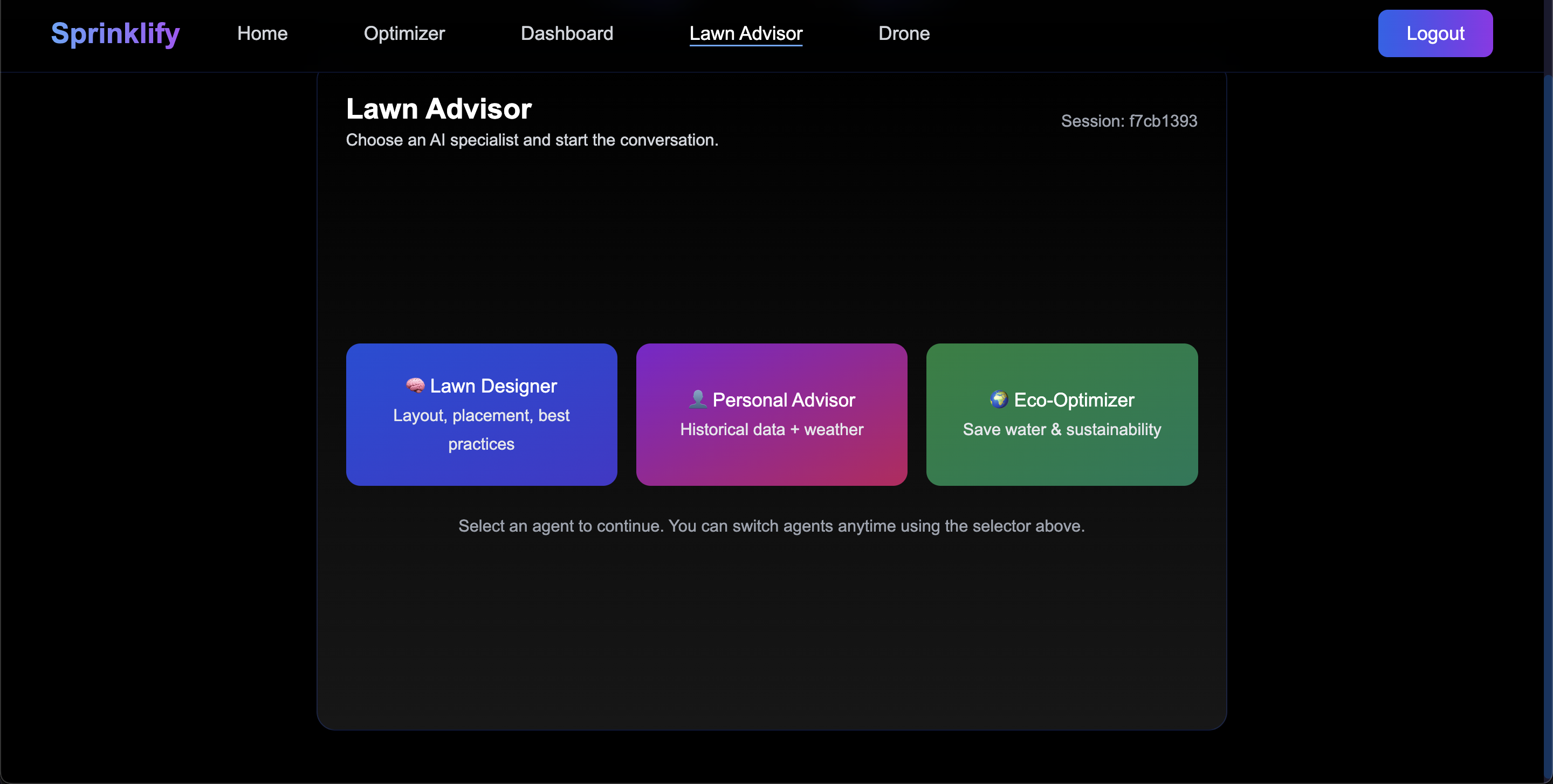
🧠 Gemini Integrations Throughout
- Text → GeoJSON parsing
- Three advisor modes: Lawn Designer 🧠, Personal Advisor 👤, Eco-Optimizer 🌍
- Explanations of optimizer results (e.g., “Sprinkler S1 rotates 40°–120° to minimize overlap…”)
- Sustainability narratives (“This schedule saves 12,000L/year ≈ 3 swimming pools”)
- Multilingual support for global users
🧪 Tech Stack Summary
- Frontend: React + Tailwind + Konva
- Auth: Auth0 (MFA, JWT)
- LLM: Gemini API (text→GeoJSON, explanations, narratives)
- CV: OpenCV + Shapely
- Optimizer: OR-Tools CP-SAT + PPO RL
- Analytics: MATLAB (heatmaps, optimization, geometry, MP4)
- Backend: Spring Boot (gateway), Flask (ML/CV/optimizer)
- DB: MongoDB Atlas
- Hardware: Arduino-class controller + DJI drone integration
🚧 Challenges
- Synchronizing multiple sprinklers with rotation limits and real-time flow.
- Handling informal text input (solved via Gemini + validation).
- Cleaning drone footage for reliable polygon extraction.
- Making solver + RL outputs feasible and explainable.
🏆 Accomplishments
- Full pipeline: text/image/drone → GeoJSON → optimized plan → MATLAB analysis → hardware execution.
- Real working controller with sensors, rotation, and flow control.
- MATLAB integration for heatmaps, optimizer benchmarking, and animations.
- Gemini used for both authoring and explanation, making the AI feel like an advisor.
📚 What We Learned
- Combining optimization and learning yields superior plans.
- MATLAB accelerates numerical analysis dramatically.
- Explainability (Gemini) improves user trust and makes demos shine.
- A well-designed multi-agent chatbot UX adds massive perceived intelligence.
🚀 What’s Next
- Weather-aware & predictive watering (LSTM/XGBoost)
- Edge ML on microcontrollers for pedestrian detection
- Multi-node coordination across large campuses
- AR visualization of sprinkler coverage
- Voice mode (Gemini + ElevenLabs)
🛠️ Built With
React · Tailwind · Konva · Spring Boot · Flask · OpenCV · Shapely · Gemini API · OR-Tools · PPO RL · MATLAB · MongoDB · Auth0 · Arduino · DJI Mini 3 Drone




Log in or sign up for Devpost to join the conversation.