-
-
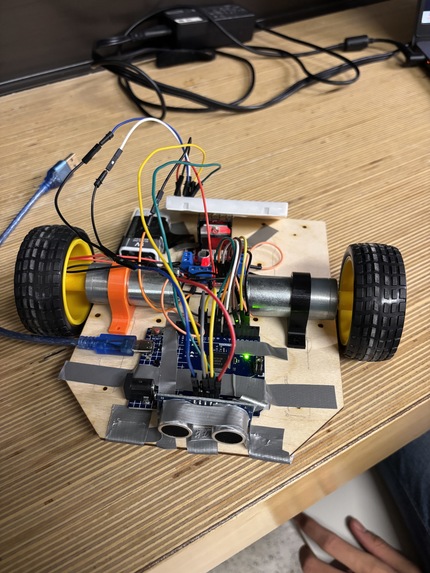
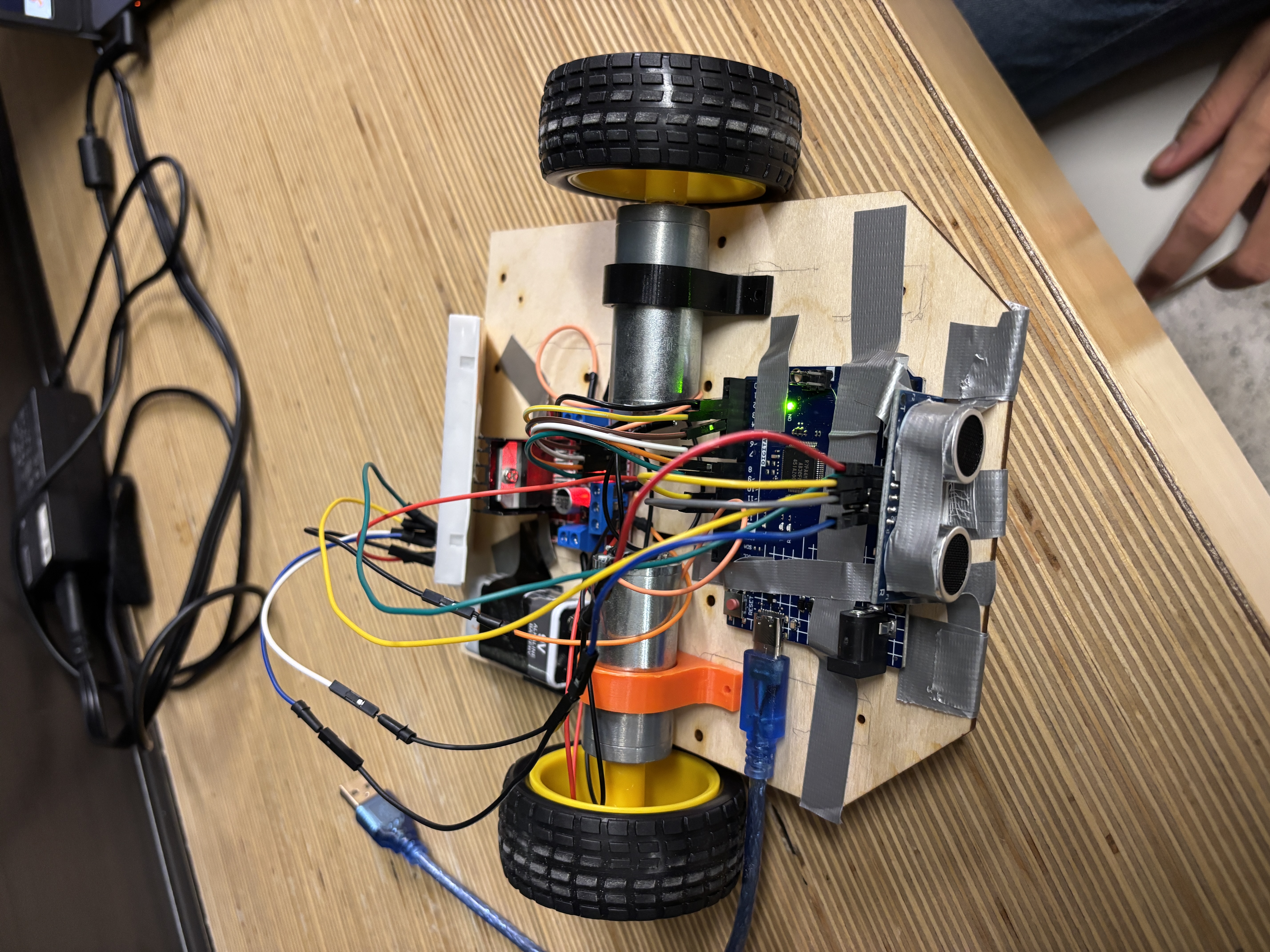
UltraMetre Prototype (Front View)
-
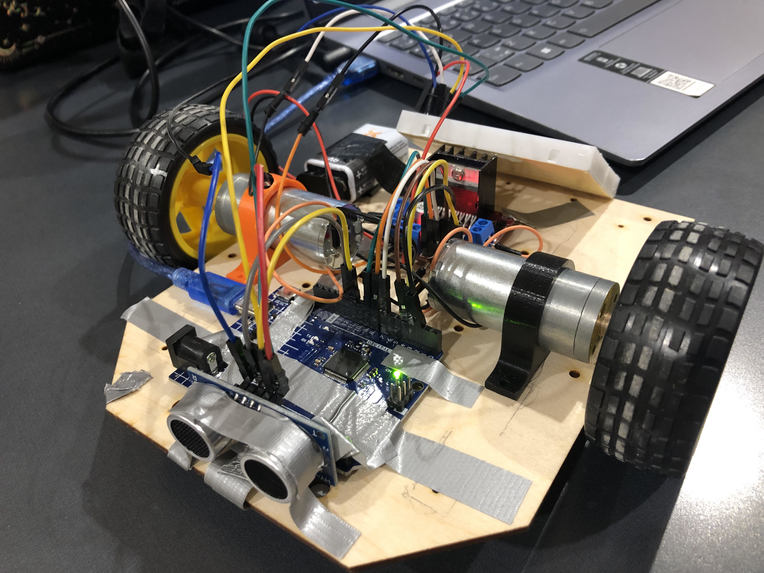
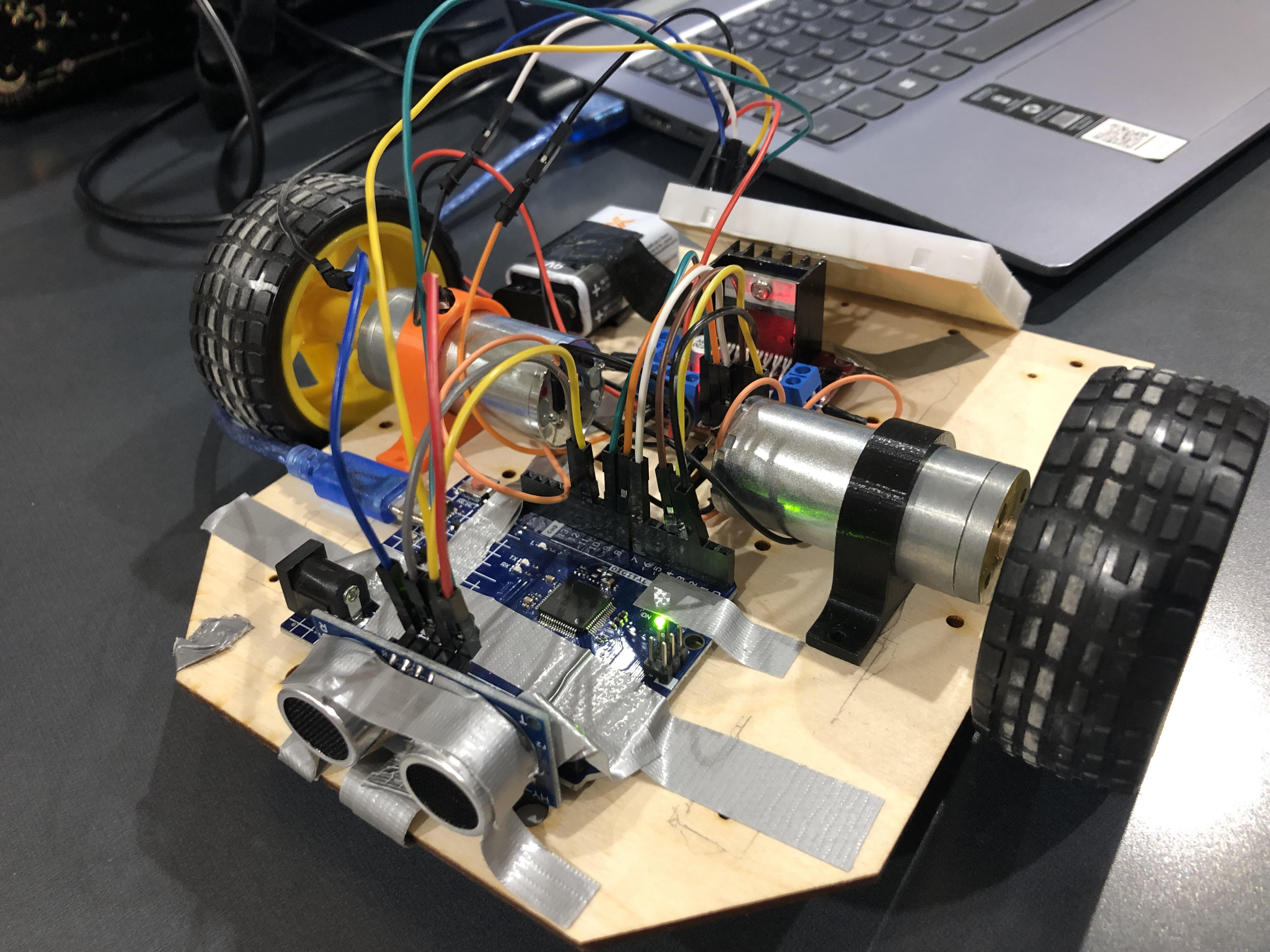
UltraMetre Prototype (Diagonal View)
-
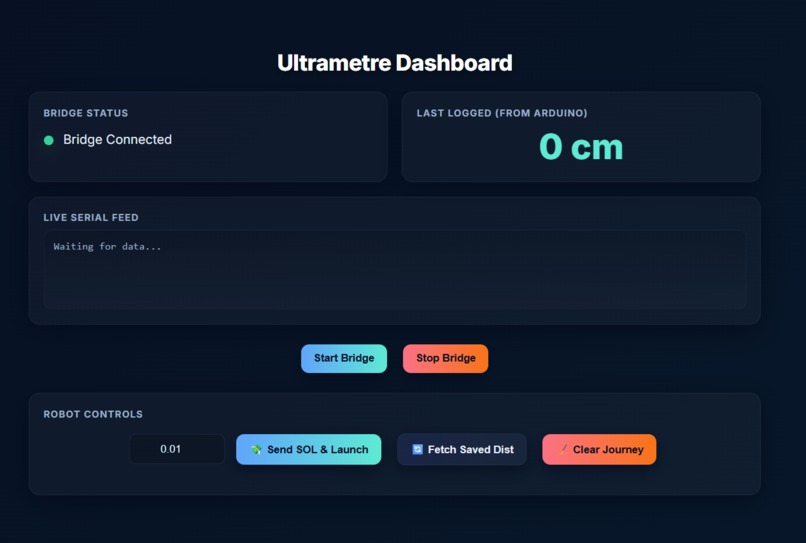
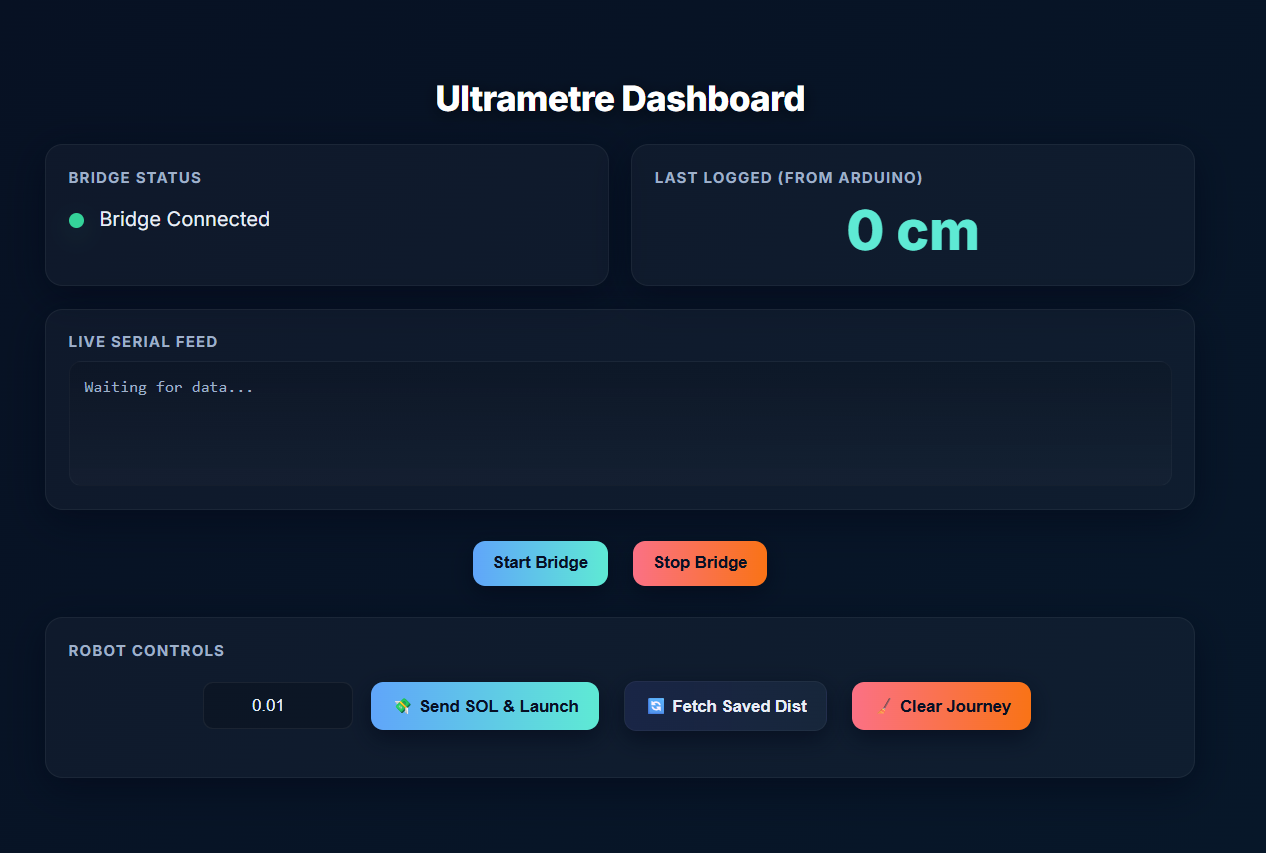
UltraMetre Dashboard Before Connection
-
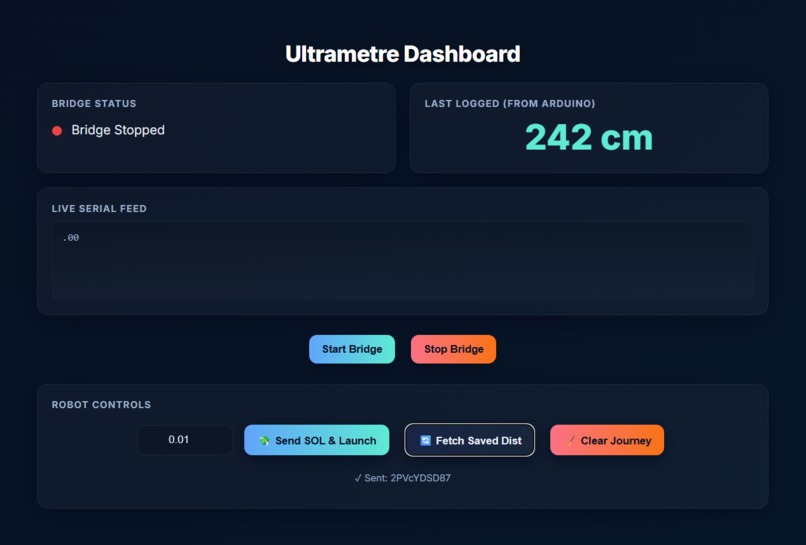
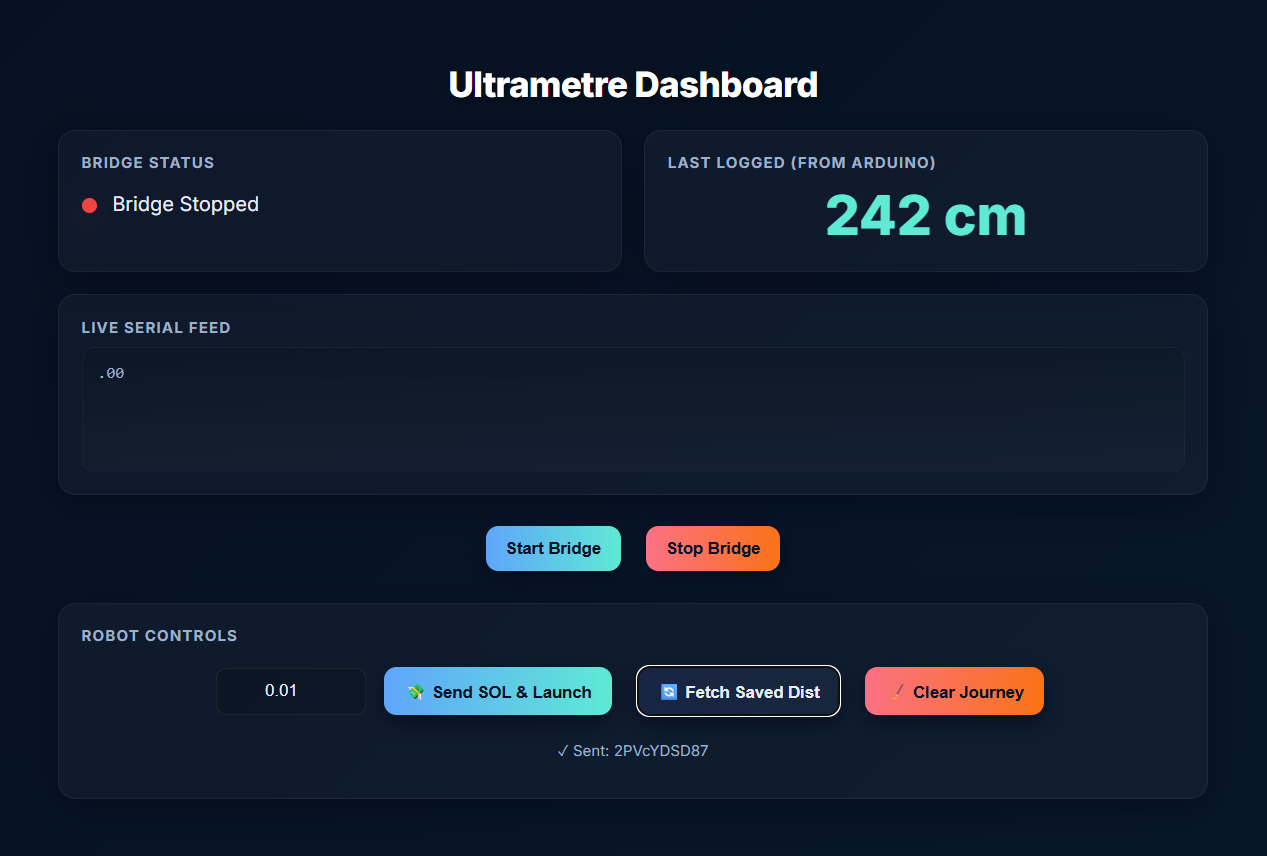
UltraMetre Dashboard After Connection
-
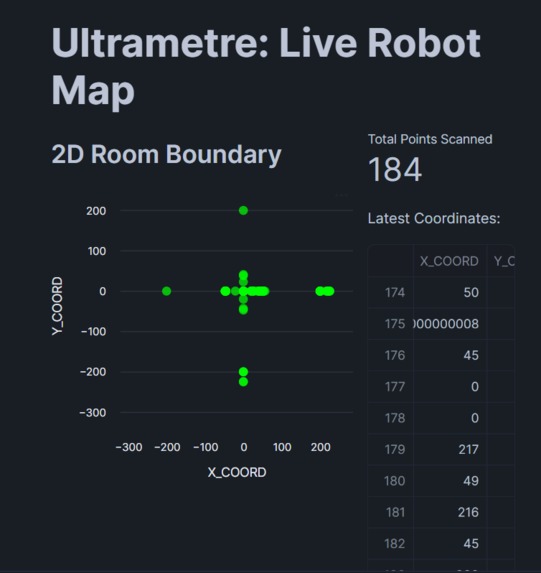
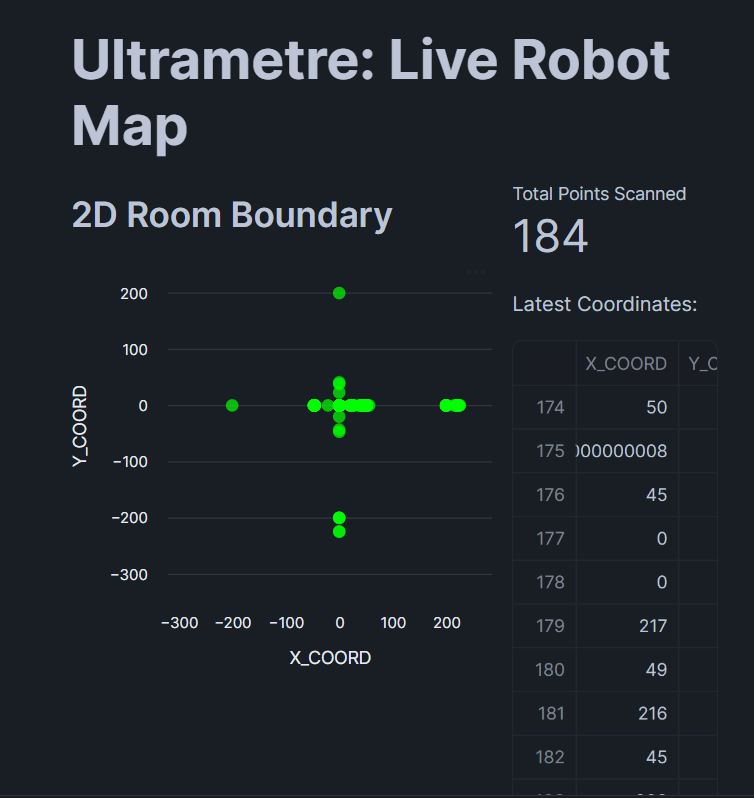
Snowflake Data Chart
-
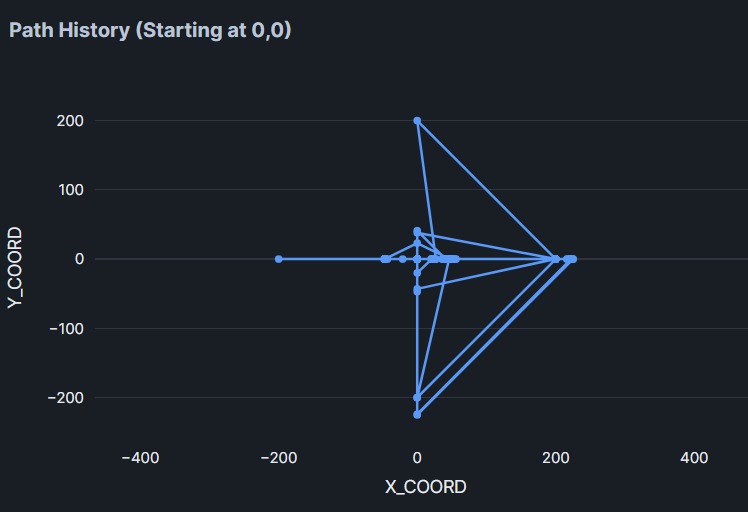
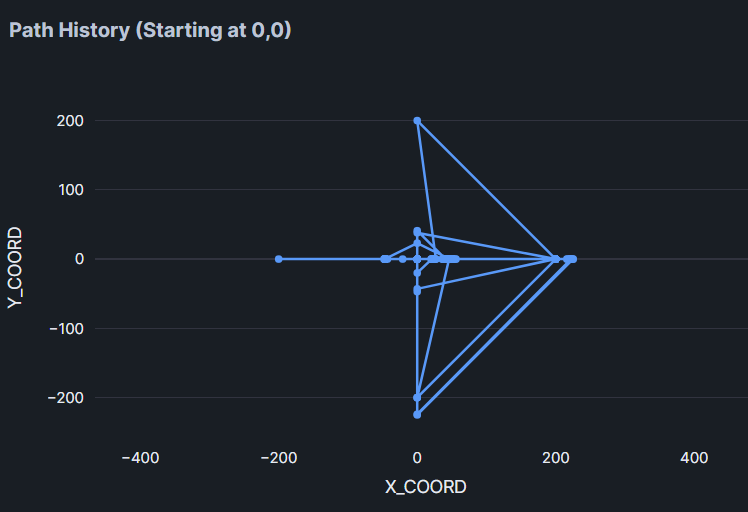
Snowflake Path Tracking Chart
-
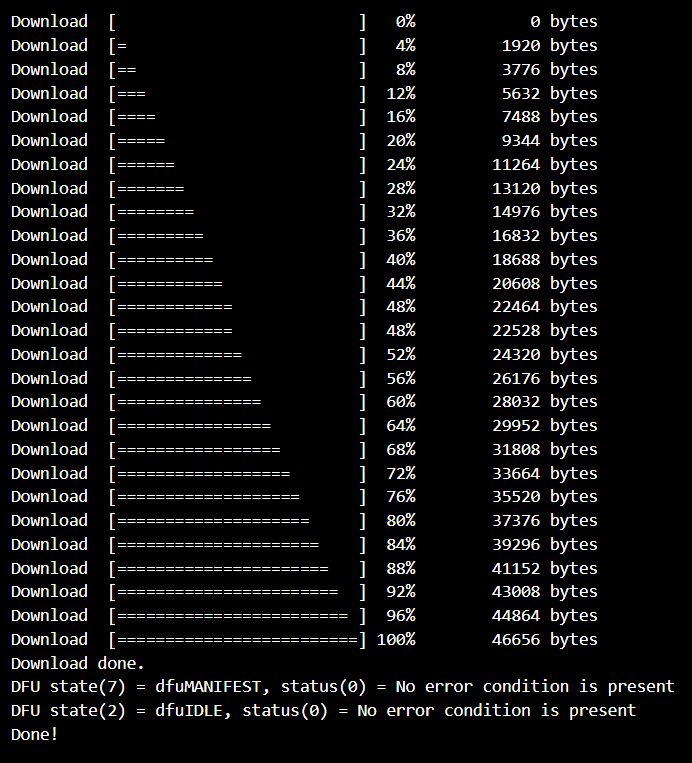
Arudino Program Upload
-
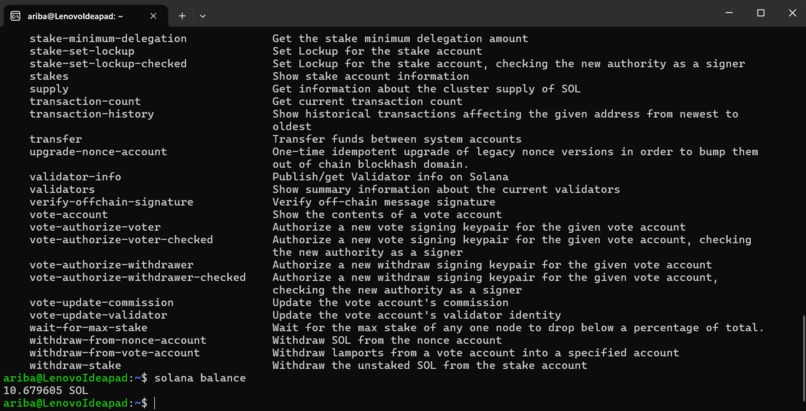
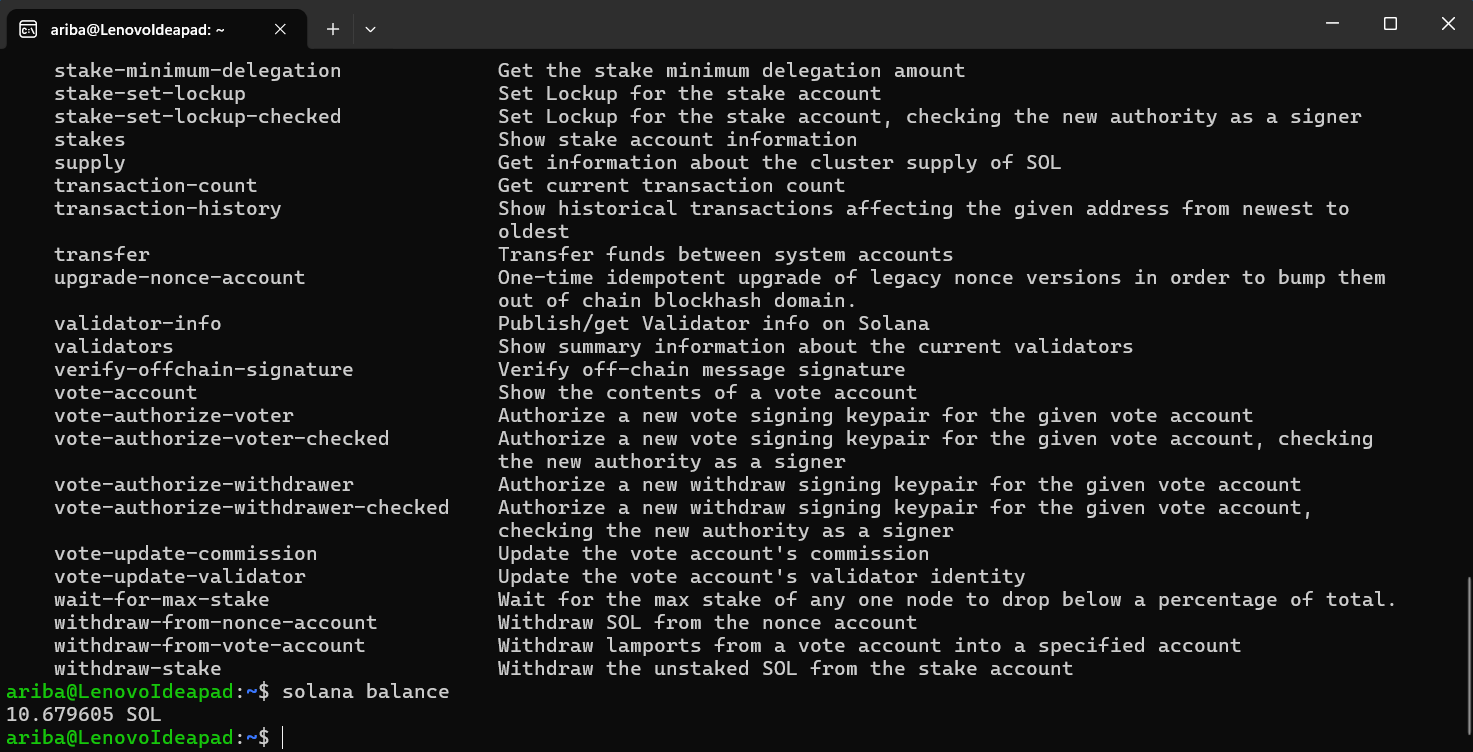
Ubuntu Solana Terminal
Inspiration
UltraMetre was inspired by a desire to eliminate the delays, uncertainty, and lack of transparency that often plague post-disaster insurance inspections. Currently, homeowners are frequently left waiting weeks for manual assessments, while insurers struggle to verify damage in environments that may be unsafe to enter. We wanted to engineer a data-driven solution that removes human risk from early reconnaissance and creates an immutable digital record that all parties can trust.
By leveraging the Solana blockchain, UltraMetre ensures that inspection sessions are cryptographically authenticated and recorded on-chain. This creates a "single source of truth" that reduces claim disputes and enables faster, fairer payouts following a disaster.
What it does
The robot serves as an autonomous assistant by mapping disaster zones and detecting structural hazards. Once activated via a Solana transaction, the robot executes its mission and uplinks verified telemetry to a software platform used by insurance adjusters.
- Sensing: Ultrasonic sensors allow the robot to identify obstacles and drop-offs, preventing collisions while gathering spatial measurements of structures.
- Locomotion: Dual DC motors enable the robot to navigate complex environments and execute precise turns to avoid debris.
- Data Flow: The Arduino acts as the local processing unit, gathering sensor data and buffering it before transmission. This system interfaces with the Solana blockchain, where token-based credits govern the robot's activation and operational lifespan.
How it is funded
Insurance companies "stake" funds into the robot’s wallet, which acts as a programmable trigger for a verified scan. Because we use Solana, the Proof of Mission is written on-chain, and funds are programmatically released once the data is verified. This eliminates claim disputes and automates the financial pipeline. The robot’s travel distance is dynamically calculated based on the amount of SOL received, though we plan to add USDC support for increased price stability.
How we built it
UltraMetre is built on a lightweight, laser-cut chassis. The hardware stack includes:
- L298N Motor Driver: Controls the speed and direction of the high-torque DC motors.
- Ultrasonic Transducers: Measures distance in real-time for autonomous navigation.
- Node.js Bridge: Monitors the blockchain for incoming transactions and communicates with the Arduino via Serial.
The control logic handles sensing and movement simultaneously, ensuring the robot can operate autonomously once the "Launch" command is received from the bridge.
Challenges we ran into
- Kinetic Drift: Since the two DC motors were not identical, the robot initially suffered from a slight drift. We corrected this by implementing software-side power balancing, adjusting the PWM (power) values for each motor to ensure a straight path.
- Mechanical Integrity: The original motor-to-wheel supports were too fragile. We reinforced the drivetrain by moving to a direct-bond method to handle the torque required for turns.
- Environment Configuration: Setting up Solana on Windows was challenging due to its native Linux dependencies. We overcame this by refactoring our bridge to process transactions directly within a Windows-native Node.js environment, simplifying the deployment process.
Accomplishments that we're proud of
- Synchronous Telemetry: Successfully transmitting robot data to our software and displaying it in a clear, organized format.
- Data Persistence: Developing a robust interface using Snowflake to store and manage the historical data gathered during missions.
- Navigation Tuning: Calibrating the "turn-on-collision" logic to measure corners accurately despite the robot's specific weight distribution.
What we learned
- Embedded Systems: How to design and assemble a functional robotic system as first-time hardware hackers.
- Blockchain Utility: Discovering that Solana is a powerful tool for securing and verifying physical data, not just for currency transfers.
- Geospatial Processing: Learning about Snowflake's built-in support for geometry and geography functions, which will be vital for future mapping.
What's next for UltraMetre
The next phase of UltraMetre involves integrating LiDAR and Infrared (IR) sensors to achieve high-resolution 3D mapping and thermal damage detection. We also plan to develop a more granular database so insurance users can access a detailed historical overview of their property. This enhancement will move us closer to a fully realized SLAM (Simultaneous Localization and Mapping) platform for advanced disaster relief.
Built With
- arduino
- c++
- css3
- express.js
- html5
- javascript
- node.js
- snowflake
- solana
- ubuntu









Log in or sign up for Devpost to join the conversation.