




Inspiration
Agricultural automation has allowed us to turn the tide on food insecurity, but the expensive nature of these systems means that this revolution has been confined to developed countries. We wanted to make something that could help automate farming without imposing a large financial burden on communities.
What it does
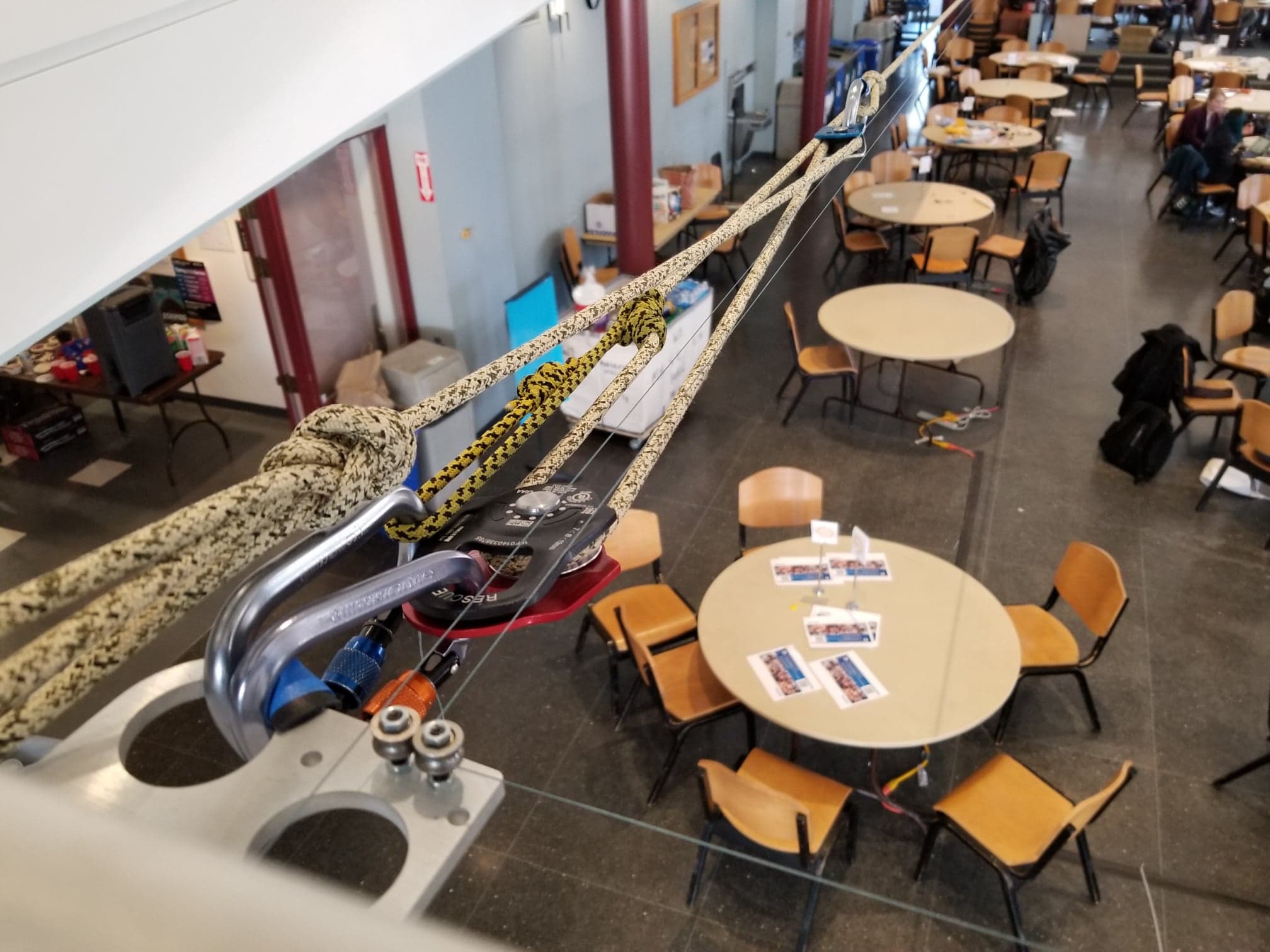
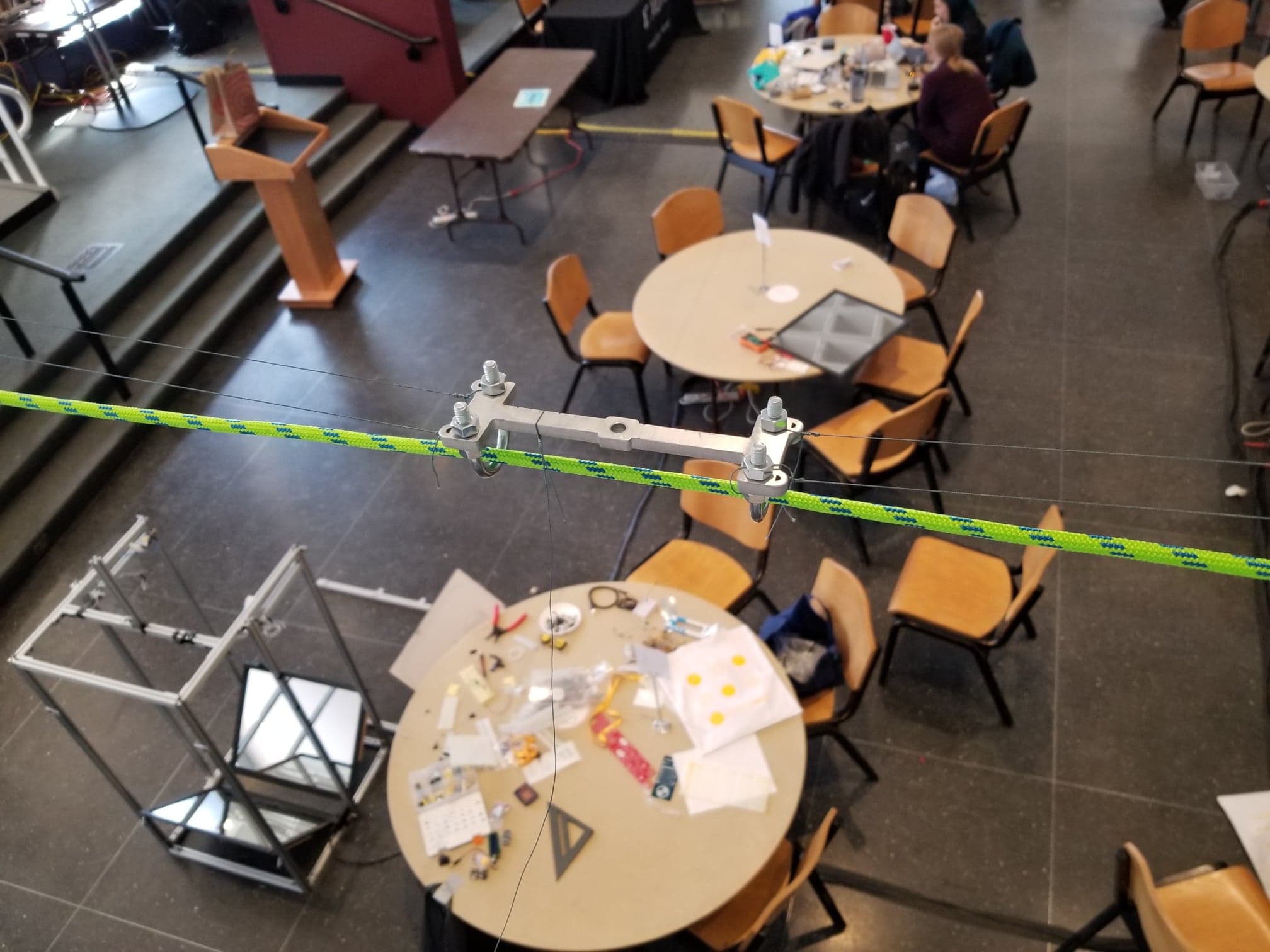
Our project is a low-cost and extremely massive cartesian motion platform made to automate tasks on small fields. A gantry system made entirely out of ropes allows us to move an actuator across the entirety of a room with high precision. This actuator can be used to distribute seeds and pesticides (although for the sake of this demo, we are using a whipped cream dispenser).
How we built it
This motion platform takes advantage of tensegrity; by putting ropes in tension, we can make extremely stiff structures that span large distances. Climbing ropes are used to make the primary rails in the system. Fishing line is used in a CoreXY configuration to drive the actual carriage. A Python script connected to GRBL controller drives the stepper motors.
The whipped cream actuator is self-contained and uses a servo to actuate a pressurized can. Internet connectivity lets us operate it wirelessly.
Challenges we ran into
Our project is the only project in MakeMIT history to require a safety plan (which we've attached).
Accomplishments that we're proud of
We were banned from demoing our project (which is kinda cool), until the start of judging!
What we learned
We should not make things taller than 6 feet.
What's next for Ultra Sky Crane
We would like to reassemble this in an outdoor space and see if we can make it do something interesting!
Built With
- 3dprinting
- aluminum
- arduino
- grbl
- laser-cutting
- python
- raspberry-pi
- solidworks
- water-jetting

Log in or sign up for Devpost to join the conversation.