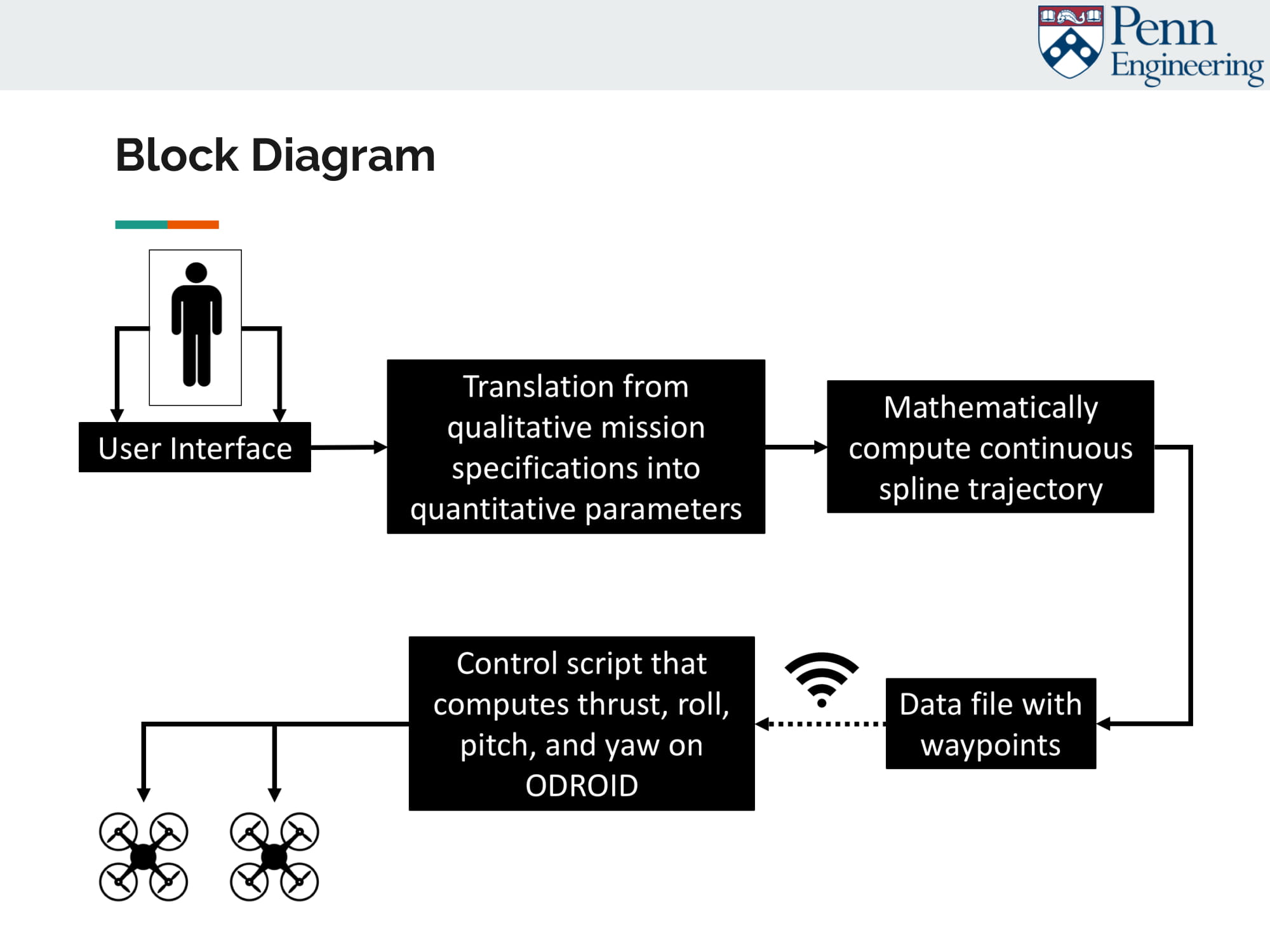

The project aims to construct a user interface that integrates a fleet of autonomous unmanned aerial vehicles, allowing them to execute tasks independently and simultaneously on demand in an urban environment. Current solutions are lacking in executing time bound constraints as well as reliable and robust translations from discrete models to continuous operations. We aim to design a multi-layered mission planner upon an existing trajectory optimization algorithm which solves these problems and also achieves safe and efficient path planning and task completions. We also strongly believe in the merit of this project due to its relevance in the urban environment; drones hold great potential for improving safety and efficiency for things like disaster relief in heavily populated areas. This project addresses the need for drones that can operate safely in an obstacle-heavy area while also being readily available immediately at all times.
Built With
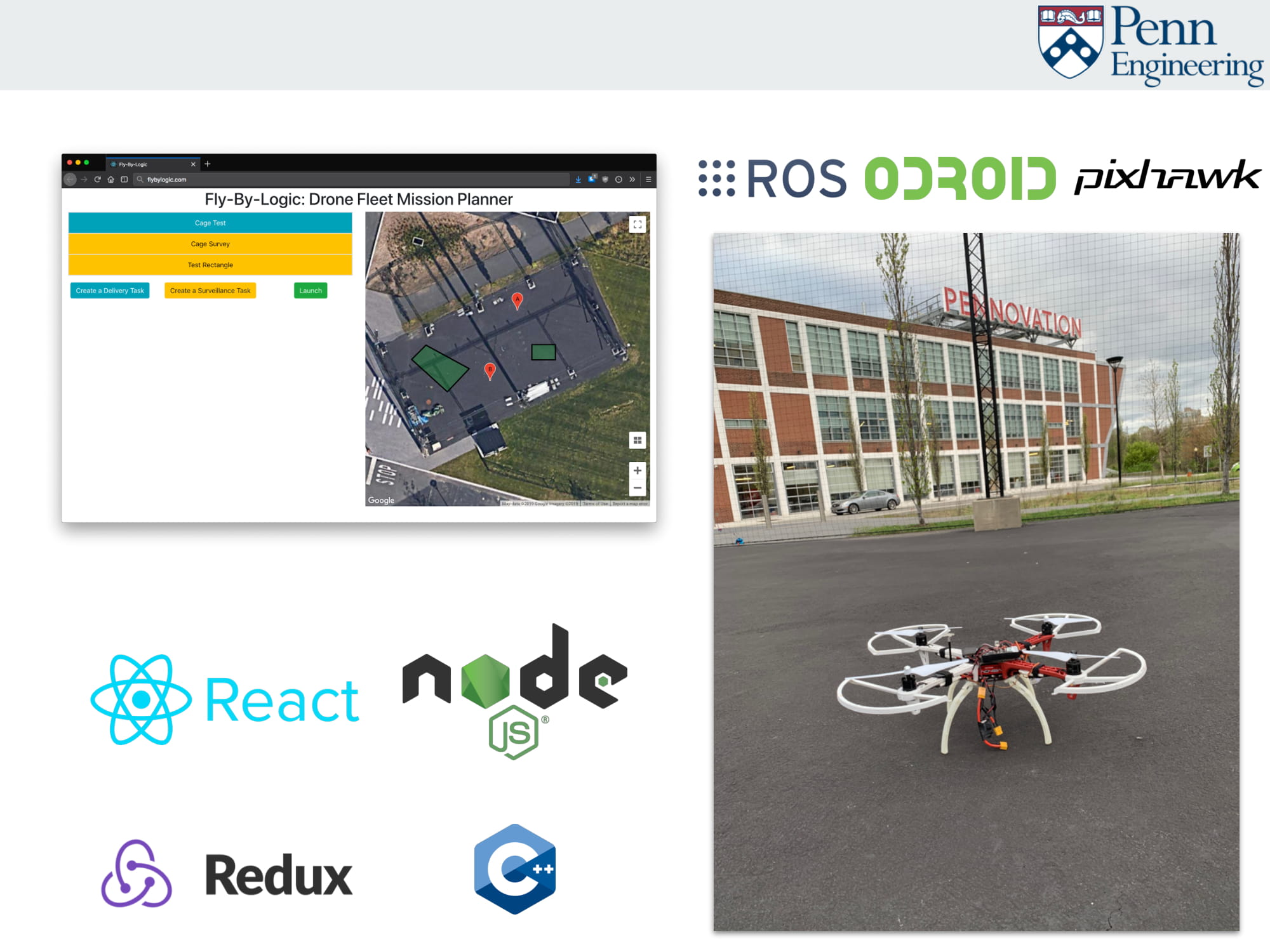
- c++
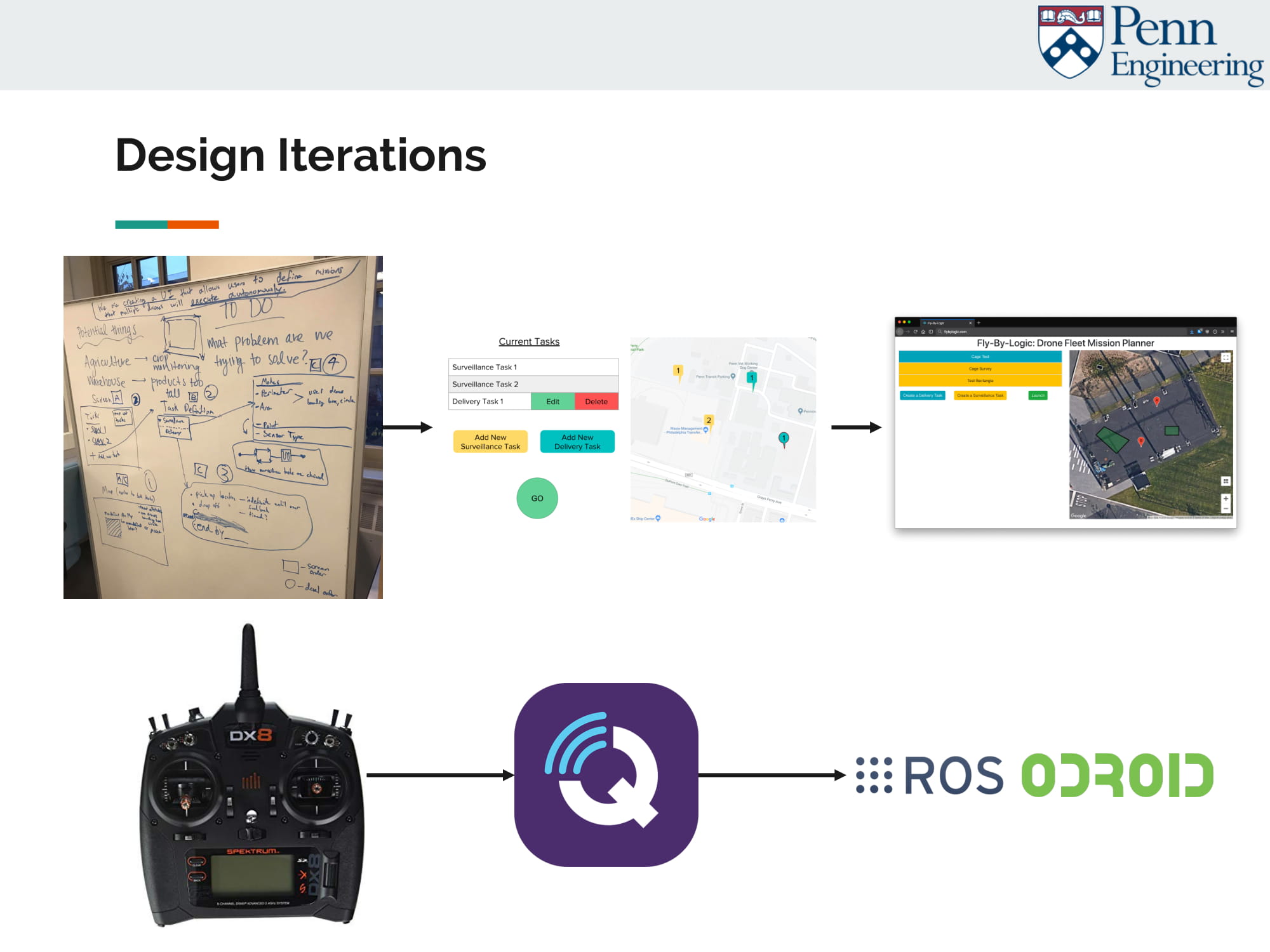
- odroid
- pixhawk
- raspberry-pi
- react
- redux
- ros

Log in or sign up for Devpost to join the conversation.