-
-

control arm
-

Machine Arm
-

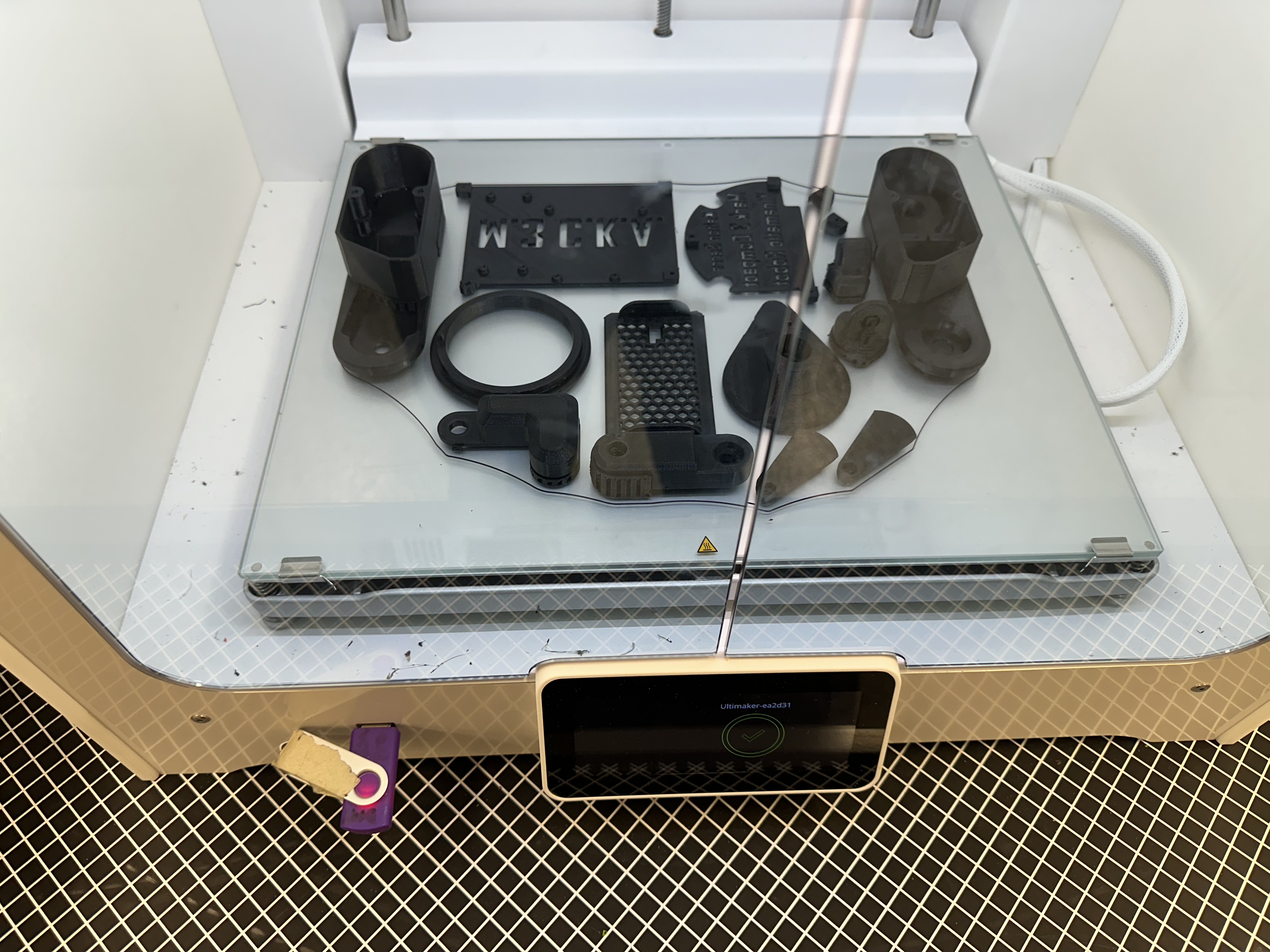
3d components
-

3d components
-
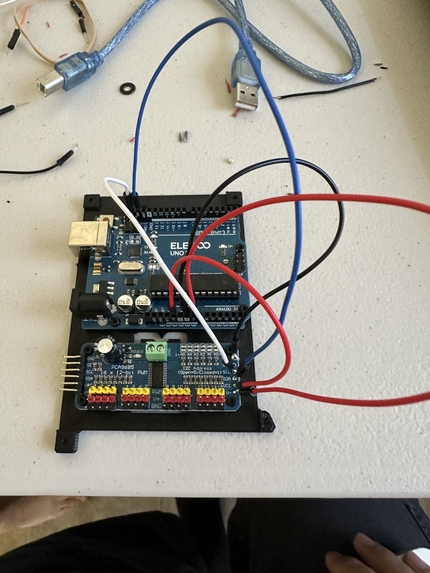
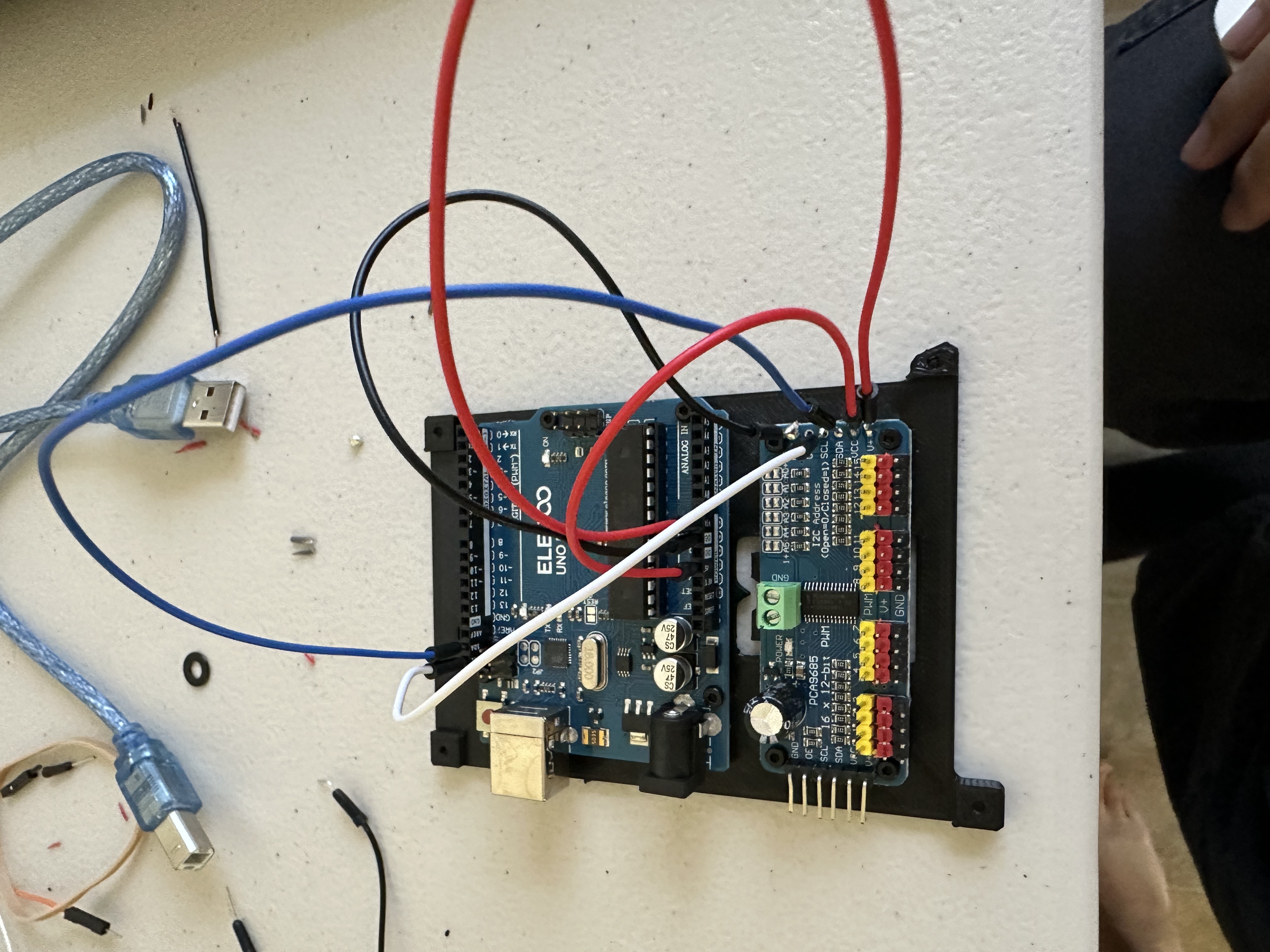
Arduido UNO R3 in the progress of welding connecting lines
-
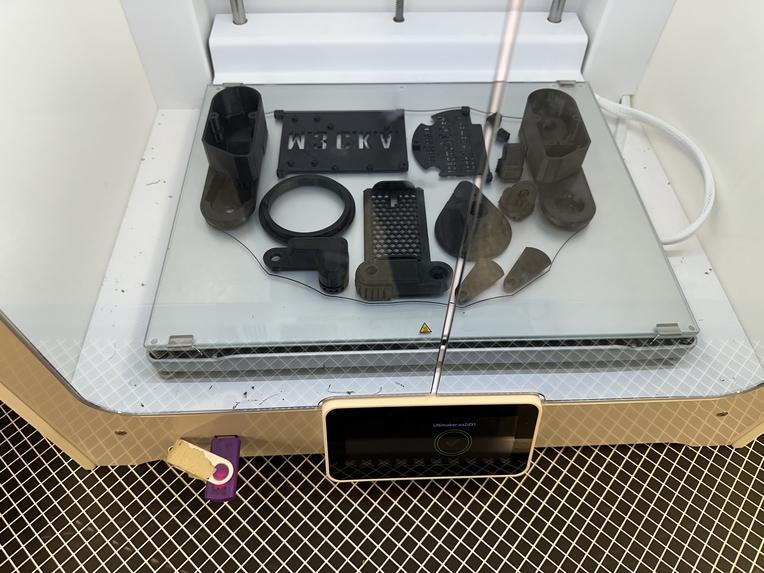
3d components
-

night of working





Inspiration
A long time ago, we've been thinking about making a robotic arm, but we always felt that those controlled by buttons and joysticks were very boring and not cool at all. Once, we came across a news article in a medical journal that talked about the development of a twin surgery kit in the medical field. It allows doctors to remotely control surgical instruments, enabling precise control of the surgical tools on the patient's body, and achieving remote precision surgery. This inspired us greatly. Could we also create a remotely controlled, twin robotic arm? That would be so cool. So, the first generation of the twin robotic arm was born, a large robotic arm that could be manually operated remotely through a small robotic arm!
What it does
Our robotic arm consists of two primary components: the Control Arm and the Machine Arm. The Control Arm, a smaller robotic unit, acts as the operator's interface, mimicking the movements of the larger Machine Arm. This enables extremely precise control over the Machine Arm's operations, allowing for intricate operations. The system facilitates fast and smooth rotation of the base, providing better positioning. We also have precise control over the individual joints of the robotic arm, providing ease of operation and accuracy. We have a special gripper mechanism that offers firm and swift gripping of items, which enables our robotic arm to adapt in more problems and situations.
How we built it
A week before the competition, we finalized the design, which included using an Arduino board, 5 PWM servo motors, and four potentiometers as the key components of the hardware. We opted for 3D printing to encase the robotic arm. On Wednesday of the week when DAHACKS began, we uploaded the 3D files and completed the printing using PLA material at DeAnza's 3D printing lab. Prior to the start of the competition, we purchased all the planned components and tools. Our team member, Feng Zhanxu, spent over three hours traversing the Bay Area the day before the competition to find suitable motors, including various connectors, soldering irons, adhesives, hot glue guns, and gears. During the competition, we debugged the code, including the most difficult and crucial Translation method. On the first night of the competition, we stayed up assembling hardware until 2 AM. Despite the challenging process, we felt excited upon completion!
Challenges we ran into
1.There were discrepancies in the sizes of the 3D-printed parts. which is very very very very torturing!!!!!
2.Despite searching half of South Bay, we couldn't find the specific parts we needed, so we had to urgently order them online.
3.Some gears were too small, making it impossible to install the screws.
4.We encountered a bottleneck during the code debugging process.
Accomplishments that we're proud of
1.Our team worked together really well, with each person having their own tasks that fit together smoothly.
2.We managed to get the robotic arm moving in such a short time!!!
3.Despite facing many challenges, we stayed positive and kept going. For instance, when we found out that the 3D-printed parts were the wrong sizes, it was discouraging, but we didn't give up and found ways to fix it.
What we learned
1.3D printing layout and operation
2.Improvement in coding skills
3.Some assembly tricks for mechanical components
What's next for Twin Robotic Arm
1.Adding more modules to allow our robotic arm to do more than just gripping objects.
2.Updating our code and algorithms to further improve operational precision.
3.Exploring a way to truly achieve "remote control," possibly by incorporating AI or implementing Wi-Fi for remote control functionality.
Built With
- 3dprinting
- arduido
- c
- potentiometers
- roboticarm
- servomotor

Log in or sign up for Devpost to join the conversation.