Notre inspiration:
Quand nous avons entendu le thème ds trois R, nous avons pensé au fait que le recyclage dans notre société a complètement perdu son efficacité à cause de la difficulté du triage. Nous avons donc beaucoup pensé à la planète lors de la création de ce projet.
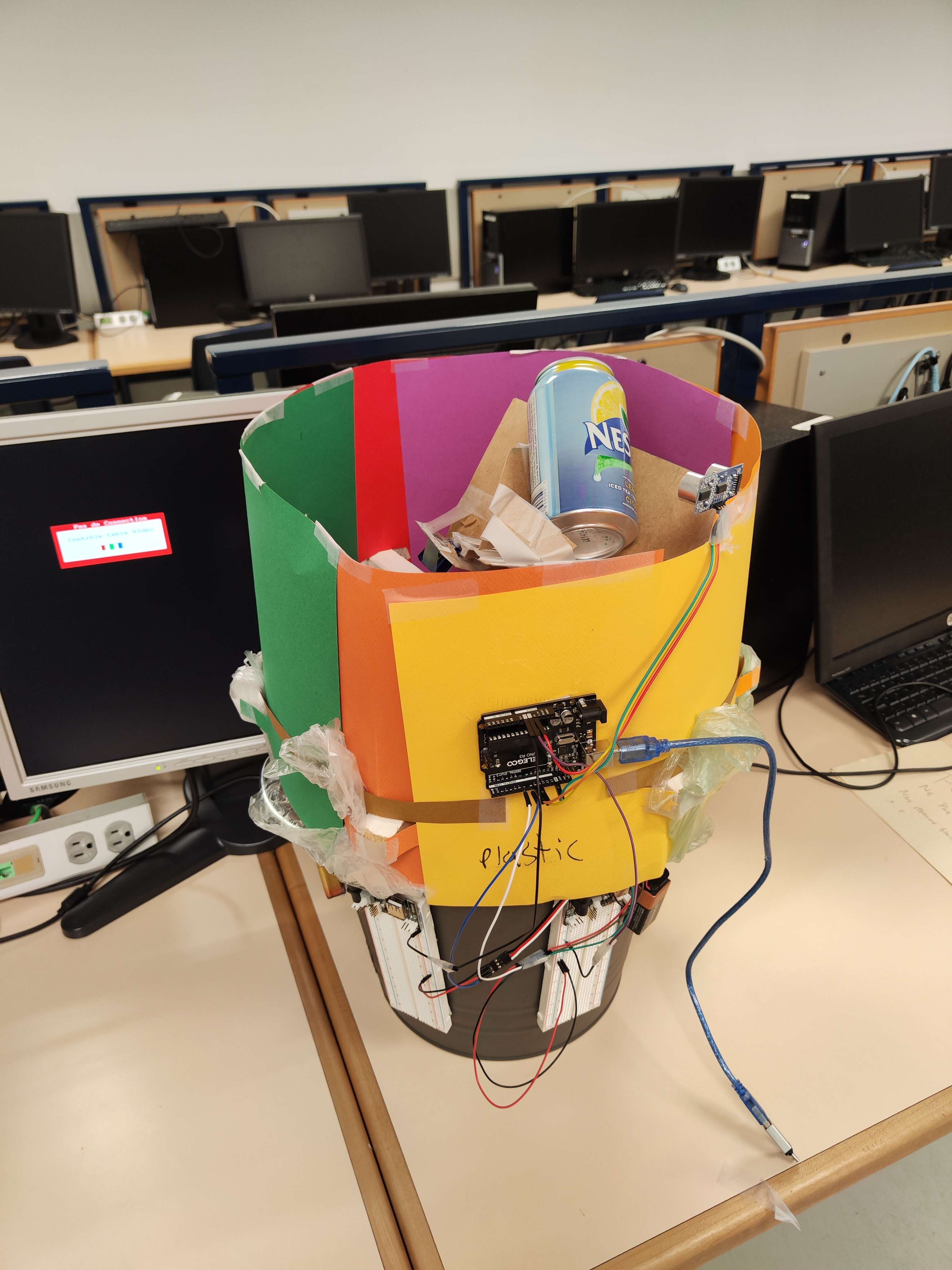
Le fonctionnement de notre robot:
ll y a 5 catégories de déchets dans lesquelles notre poubelle peut trier: déchet, plastique, composte, canne en métal, électronique. Nous utilisons le “vision API” de Google pour prendre une image d’un déchet que nous plaçons dans notre machine. Avec la description de l’image qu’il nous donne, nous envoyons cette information au chatGPT model, afin qu’il décide à quel catégorie l’objet appartient (entre déchet, canne, composte, plastique, électronique). L’IA nous retourne la classe de déchets dont il a conclu que l’objet appartient et un système Arduino fait tourner un servo moteur au dessus du bon sac en plastique. Puis, un deuxième moteur fait tomber l’objet dans le sac et la machine revient à son état initial.
Les défis que nous avons du surmonter:
Nous avons eu beaucoup de misère avec l’API de Google, qui retournait des valeurs comme “trash” lorsqu’on lui montrait du papier, ou “electronics” lorsqu’on lui montrait une canette de métal. Nous avons aussi du construire une machine physique, qui nous a pris de l’effort mécanique comme scier des planches et assembler la contraption de servo moteurs. Nous avions réussi à connecter l’Arduino à un réseau Wifi, mais nous ne pouvions pas le connecter à celui de Poly, qui nécessite un serveur d’authentification. Si nous nous pouvions s’y connecter, nous aurions pu déployer notre serveur dans un cloud et nous aurions pu faire des rest API de l’Arduino au serveur (donc pas besoin de rester connecter à l'ordi). La caméra que nous utilisons est celle d’un laptop, que nous utilisons pour remplacer un capteur caméra que nous n’avions pas parmi nos composantes.
Ce dont nous sommes fiers:
Nous sommes fiers que notre machine est bel et bien fonctionnelle malgré le fait qu’elle soit très compliquée. Nous avons aussi adoré utiliser plusieurs domaine du génie dans le même projet: électrique, logiciel et mécanique. Finalement, toute la machine a été construite avec des éléments recyclés, que ce soit les modules Arduino utilisés dans d’autres projets dans le passé, les planches de bois, vestiges d’anciens meubles, les sacs en plastique et plus!
Ce que nous avons appris:
Nous avons approfondi autant nos compétences en IA lors de l’utilisation des API que celles en termes de principe physiques d’équilibre lors de la création de la contraption de servo moteurs. Nous avons aussi appris à travailler avec une meilleure structure de travail d’équipe pour réaliser un produit fonctionnel de ce gros projet en 12 heures (temps restant du hack pour tester et perfectionner) .
Prochainement pour TriClotron
Nous incorporerons le capteur de caméra et ajouterons le capteur wifi afin que notre poubelle puisse fonctionner de façon autonome et automatiquement.


Log in or sign up for Devpost to join the conversation.