-

Buggy
-
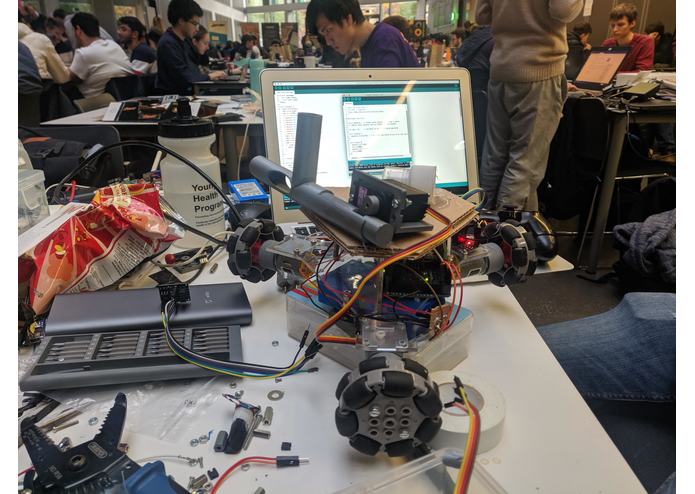
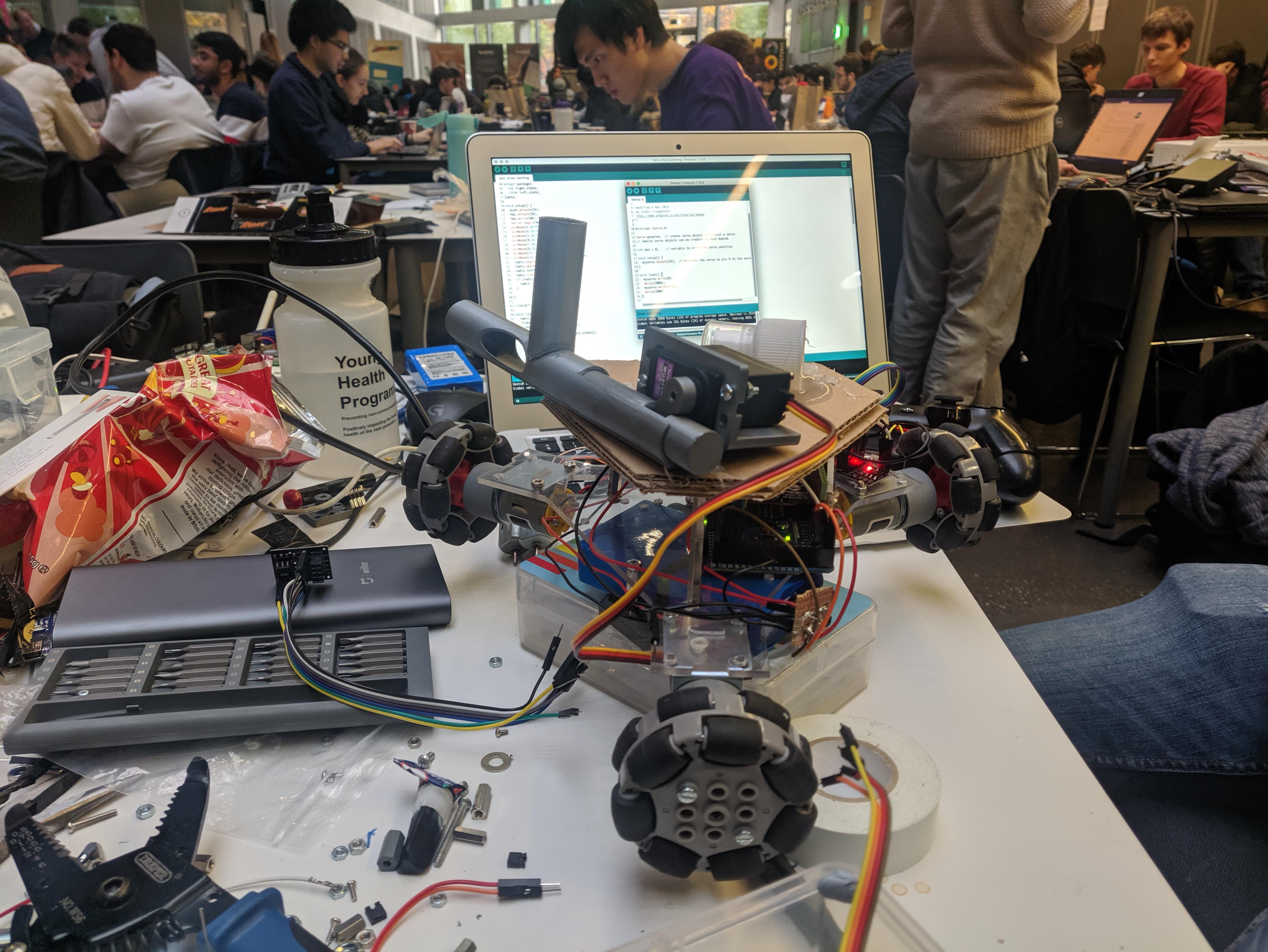
The buggy at base

Inspiration
What it does
The buggy uses 3 Omni-directional wheels to move. Where it moves is decided by position/orientation of your hand detected by a leap motion controller. The big huge red button fires the M&Ms using a turret whose aim is set by your hand's gestures
How I built it
Learnt to interface with the Leap Motion controller, detected gestures through Processing, sent that onto an Arduino using serial. Sent that data to the buggy's Arduino using nRF
Challenges I ran into
Leap motion libraries and serial communication had proven to be very unreliable
Accomplishments that I'm proud of
Got the buggy's control perfected. Were to quick to understand and implement the Leap Motion libraries. 3D modelled and printed the firing mechanism from scratch in the 24hrs provided
What's next for Tri-Omni-directionalWheeled Gesture-Controlled Buggy wTurret
A more responsive and reliable communication standard, integrate the shooting and moving.
Log in or sign up for Devpost to join the conversation.