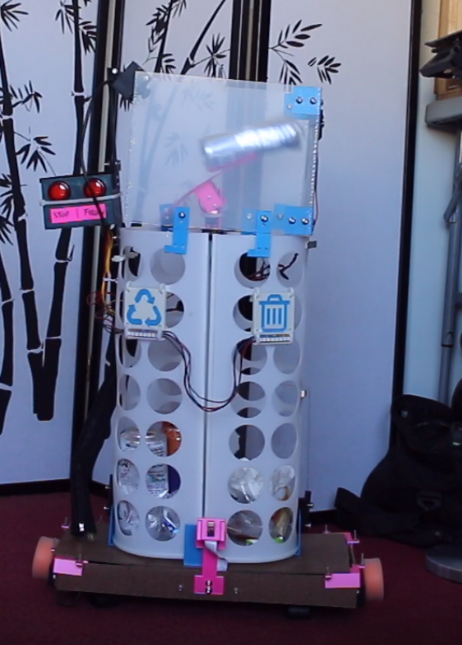


I wanted to build a trashbot so I could pick up trash while I'm outside in nature, but without touching dirty stuff and carrying around two bags.
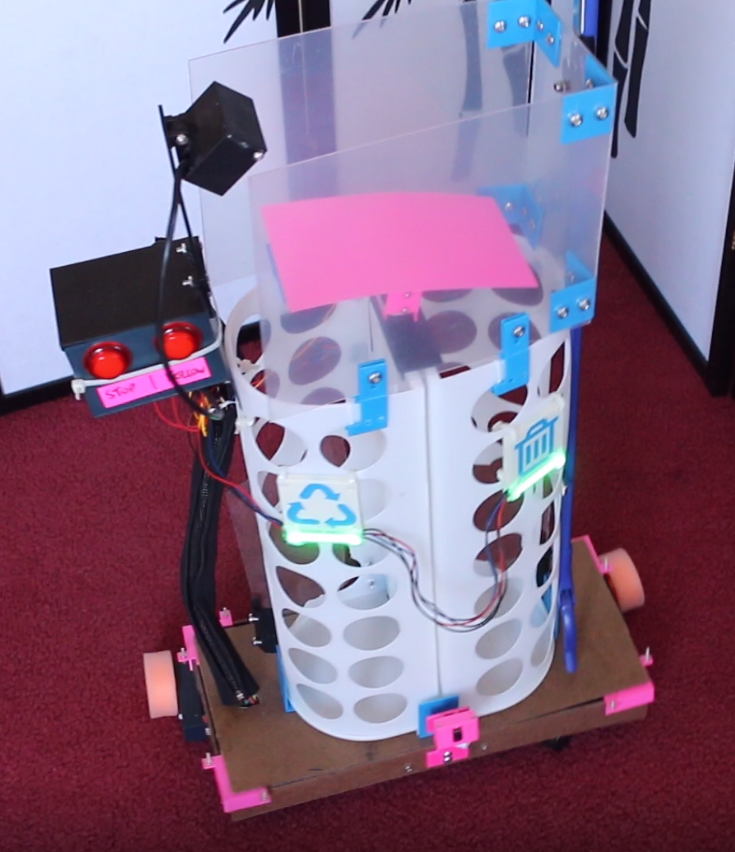
I made an intake platform that juggles a trash object, so I could gather data from different angles resulting in higher accuracy and more training data. 20 photos for each object! Also I built a labeling pipeline, you can indicate on the bot whether it's trash or recyclable and a script saves that label. No more GUI tools after the fact.
I took that data and trained a keras model on Gaudi Accelerators. It was a good experience doing that, it happened quickly, but the accuracy didn't please me. I'm looking forward to collecting more trash to train a better neural network.
Also looking forward to doing a version 2 correcting for design flaws, and potentially building a fleet!
Built With
- pi
- raspberry
- robotics
- tensorflow

Log in or sign up for Devpost to join the conversation.