Inspiration
Our inspiration came from the desire to help make the world more sustainable. We eventually decided to program a system that would help make sure that people recycled the right things, because nobody knows which bin is for what.
What it does
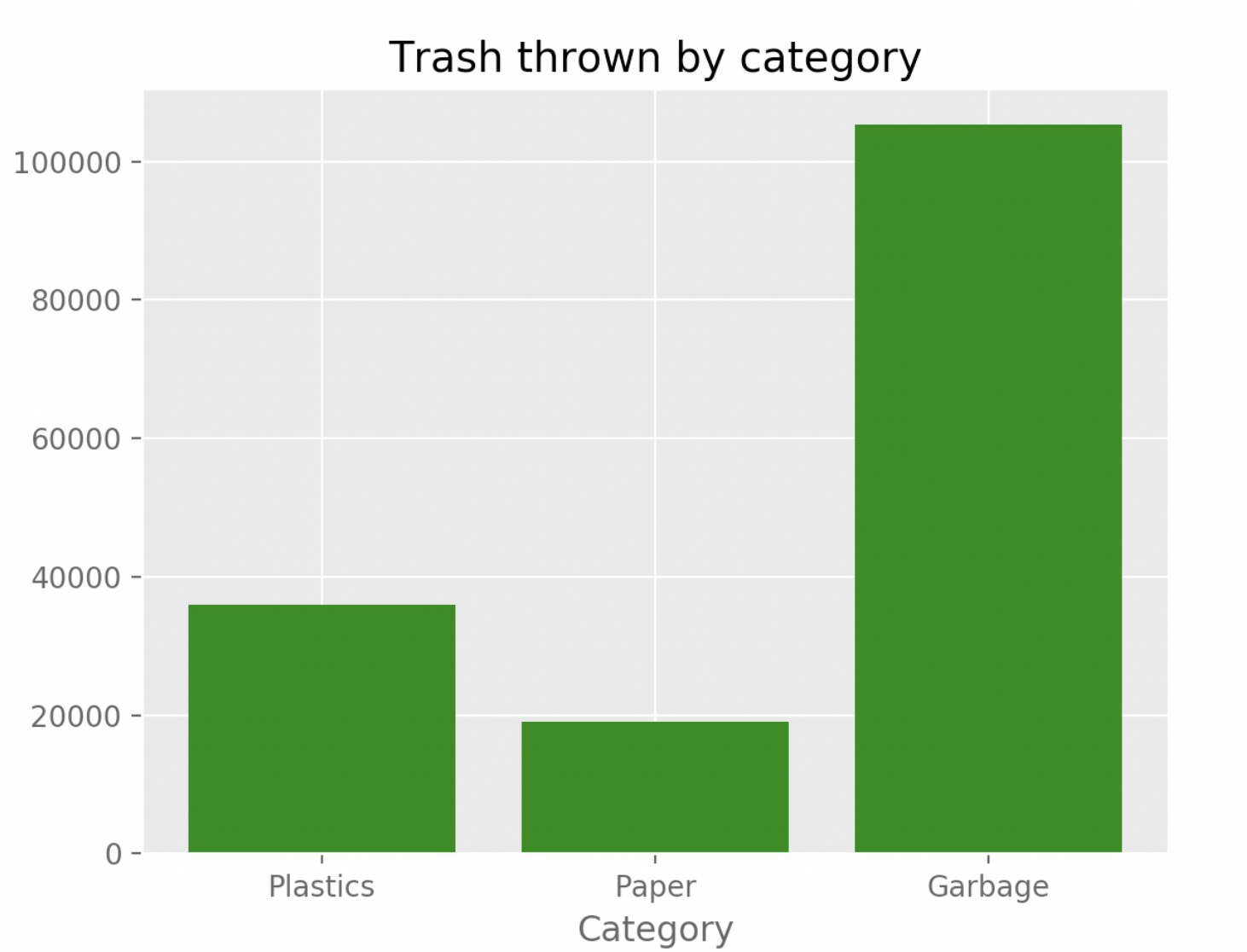
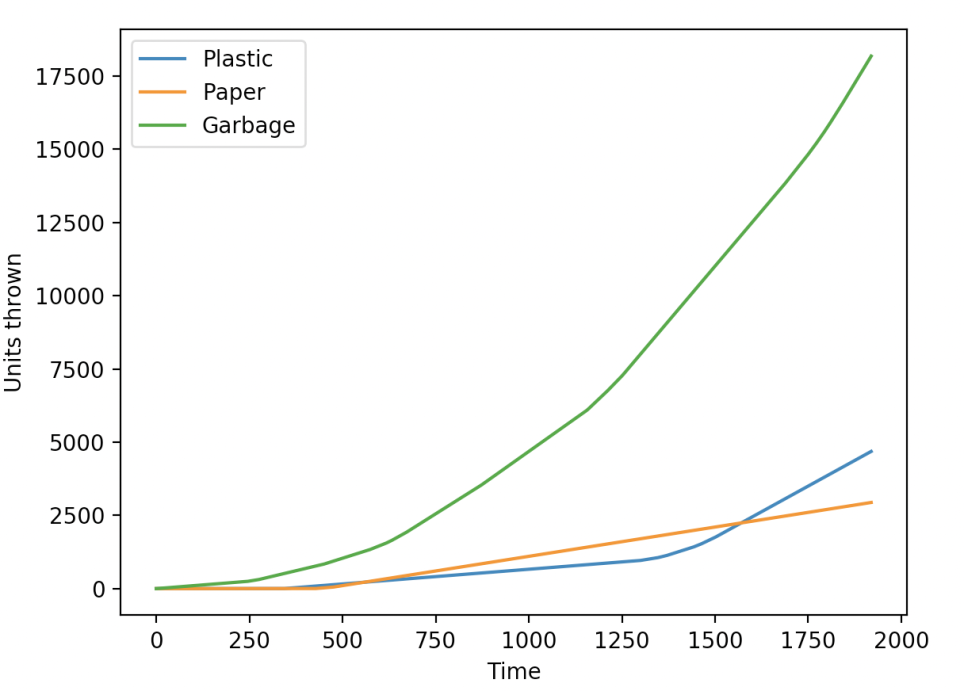
Our system first detects various objects. It then add those objects to a queue if it has not seen them. From that queue, it decides which bin needs to be opened and which servos to move. It also collects data on the amount of each type of trash being thrown away for analysis.
How we built it
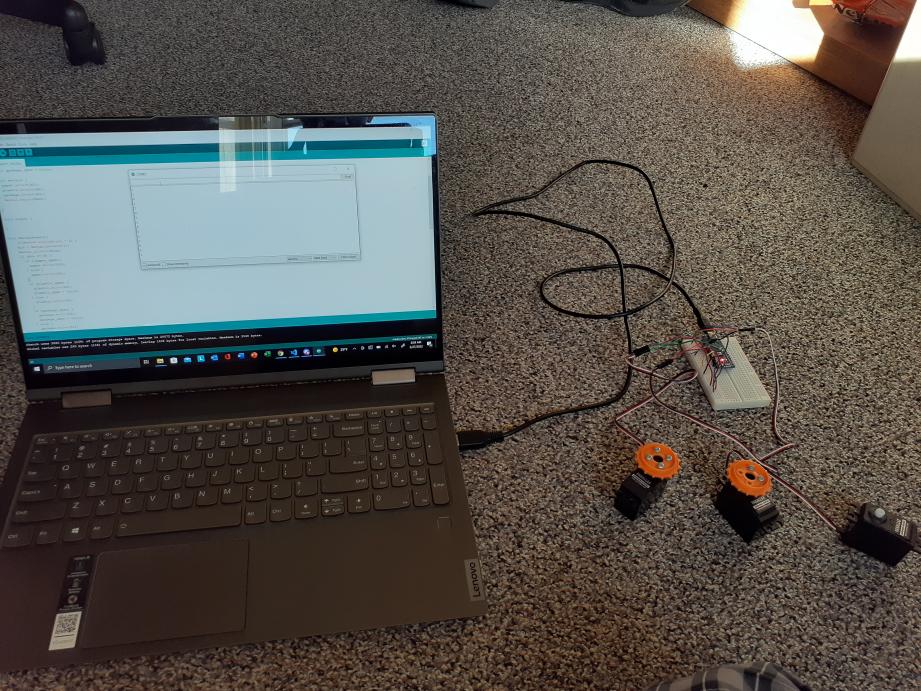
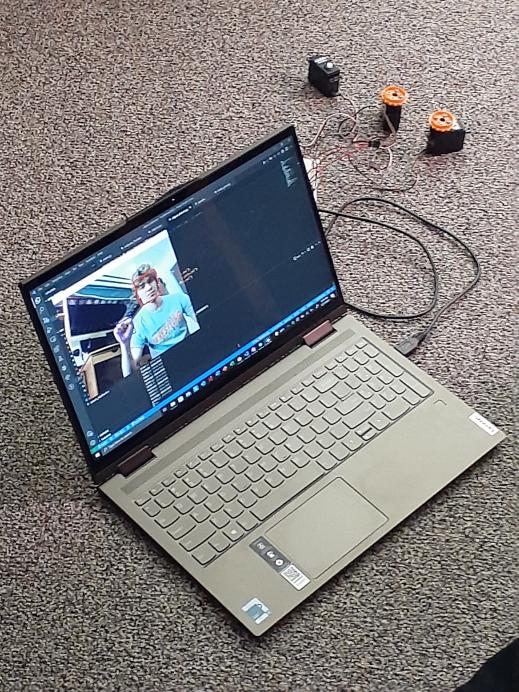
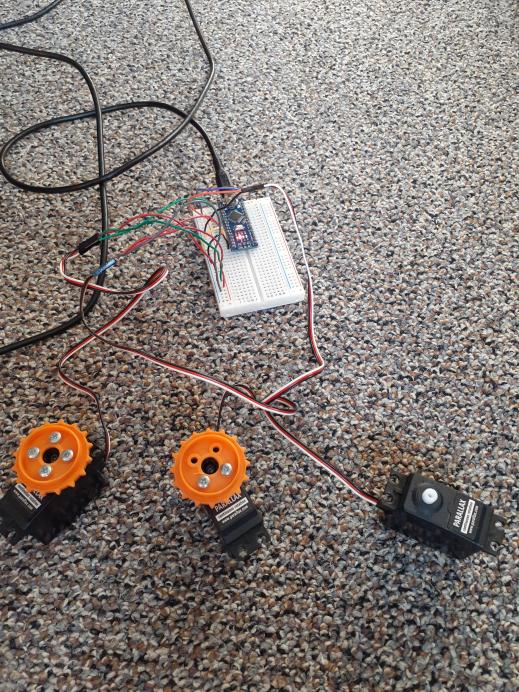
We first wrote a python program that recognized certain objects in a webcam feed and collected them into a queue. We save that information as a json file for uploading to a server. We then used pyserial to input the data into an arduino board that turned the servos.
Challenges we ran into
The biggest challenges we faced was finding out the best way to transfer data between a python program and an arduino board, as well as programming the arduino board itself. Pyserial seemed to be inconsistent and a massive load on the arduino.
Accomplishments that we're proud of
We are proud of being able to successfully get the hardware part of this project working such as servos since as a group we didn't have much prior experience with it. We were also able to get a python script to send data to an arduino and graph it.
What we learned
We learned how to work effectively as a team, and that we need to be mindful of ideas that are a bit too ambitious and time-consuming.
What's next for TrashSort
The next step for TrashSort is to make xml files for various recyclable items and input them into our program so that they can detect those items. Each file typically take about 4 days to make so we couldn't create them in the time frame of the hackathon. We also need to adjust the power supply on the arduino so that it can properly receive inputs from pyserial.

Log in or sign up for Devpost to join the conversation.