
Inspiration
We wanted a smart trash that can be tetherless with sensors mounted on the trash can itself.
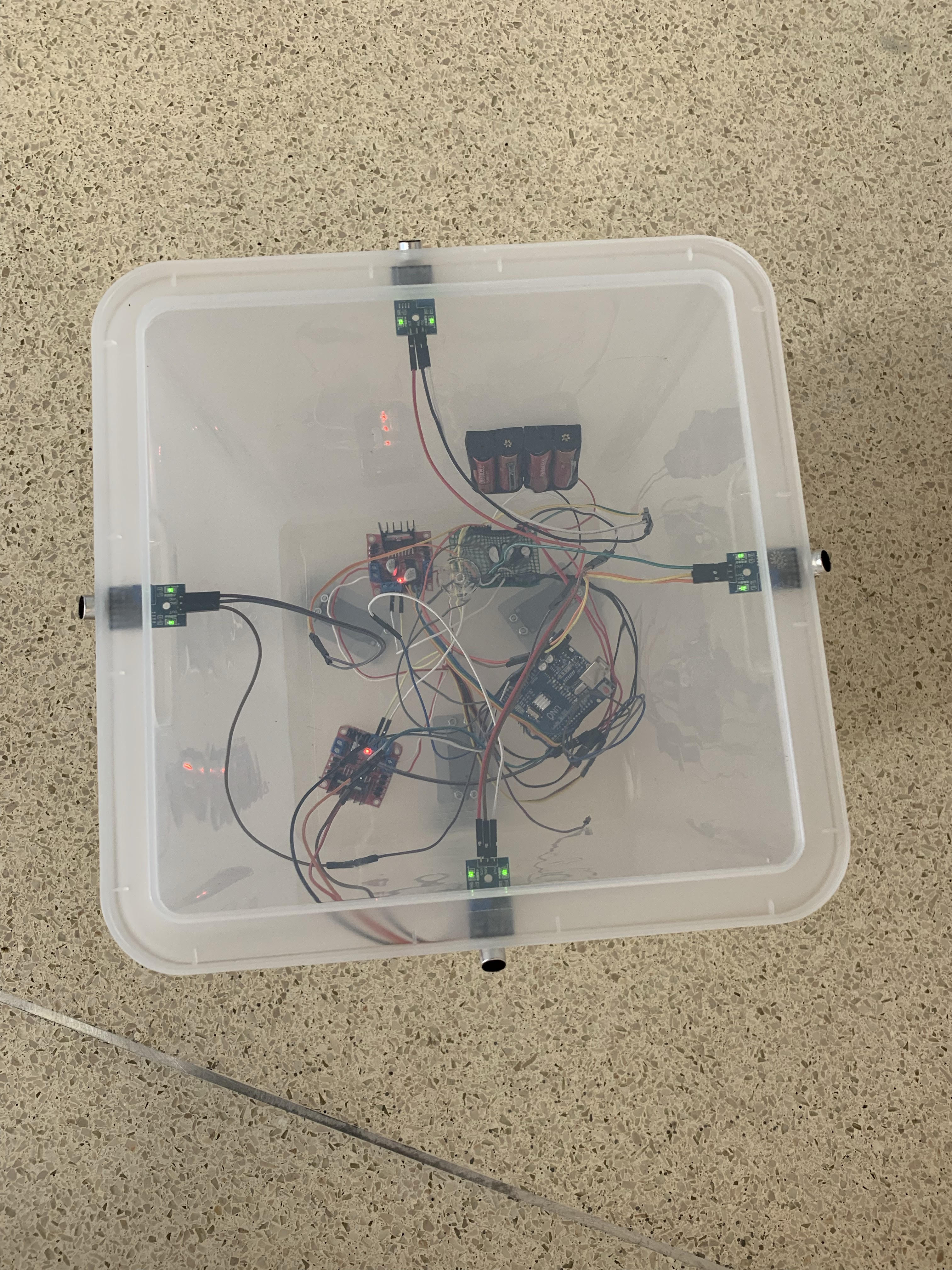
What it does
The four array of microphone listens to sound from four directions and the trash can move towards the direction for easier trash disposal
How we built it
We utilized 3d printings, rapid prototyping, and programmed the trash can in arduino.
Challenges we ran into
The motor connection brok and the trash can cannot move anymore. The sensor selection was not optimal and better wind filtering for the microphone will prove helpful.
Accomplishments that we're proud of
We are happy that we built the project within a small amount of time and that most of the capabilities were implemented, and the project is decently built if there was not hardware failure.
What we learned
Hardware design takes time and the details can not be overlooked.
What's next for TrashDog
A better sound sensor and camera attachment to the trash can is a must.

Log in or sign up for Devpost to join the conversation.